
太阳能自动浇花机器人的设计
2013-03-17 09:58陆郁民毛丽民秦加娟李增增叶国林
常熟理工学院学报 2013年4期
陆郁民,毛丽民,秦加娟,李增增,叶国林
(常熟理工学院电气与自动化工程学院,江苏常熟 215500)
太阳能自动浇花机器人的设计
陆郁民,毛丽民,秦加娟,李增增,叶国林
(常熟理工学院电气与自动化工程学院,江苏常熟 215500)
自动浇花机器人由太阳能电池板为机器人提供能量,机器人自动检测土壤湿度,当土壤湿度不利于植物生长时,机器人自动沿着指定的线路至花盆浇水,直到满足合适的土壤湿度,停止浇水并返回出发点.实验表明,该自动浇花机器人操作简单,使用方便,满足了现代生活的自动化、智能化.
浇花机器人;土壤检测;红外信号
随着居民消费水平和生活质量的提高,居家园艺市场异常火爆,许多上班族都在室内、阳台或庭院中种植花草以点缀生活.但是由于生活节奏的加快,种花容易养花难的问题暴露出来,养花最重要的问题是浇水问题,有时由于出差在外、工作繁忙等原因不能及时浇水,导致花草缺水而干枯.研究表明,花草80%以上的死亡是由于浇水不及时引起[1].在现有的能源结构中,主要是石油,天然气,煤炭等化石能源,是不可再生能源,并且这些能源非常有限[2].太阳能作为一种新型能源无疑是一种环保、绿色的能源,而且是巨量的、可再生的能源.本文设计的太阳能自动浇花机器人,可以实现根据需要自动浇水,从而确保花草能健康生长.
1 设计原理
太阳能自动浇花机器人通过太阳能电池板给机器人供电,在土壤中放置土壤湿度检测装置,当检测到土壤需要浇水时,红外发射装置将信号传输递给远处的太阳能自动浇花机器人.太阳能自动浇花机器人一旦接收到信号,就会立刻启动,按照路线准确地到达花盆位置,通过水泵给花浇水.在浇花的同时土壤湿度检测仍在继续,当检测到土壤水分达到要求,机器人会停止给水,并且返回到出发位置.(图1).
2 硬件电路设计
太阳能自动浇花机器人以单片机为控制核心,电路主要包括:土壤湿度检测电路、蓄电池保护电路、稳压电源电路、红外发射接收电路、驱动电路、红外巡线电路、超声波测距电路和压力检测电路等.
2.1蓄电池保护电路设计
蓄电池保护电路(见图2),采用太阳能板电池充电,实现防止蓄电池过充过放的功能.当蓄电池电压达到13.5 V时,VZ2击穿导通,B点电位为正,VT3反向截止,VD1导通,并触发V4导通.C3正极所充电荷经V4加于V3阴极,使V3瞬时加上反向电压而截止,关断充电压源.同时充电指示灯LED3停止发光,而电压正常指示灯LED2却正常发光.当电池电压低于或等于13 V时,VZ2截止,VT3正向导通,电流经C3触发V3导通,充电回路又连通,同时C3也被充电.
2.2 稳压电源电路设计
稳压电源电路(见图3),采用集成稳压器7805.Ui为输入电压,由蓄电池提供,Uo为输出电压,C19、C20分别为输入端和输出端滤波电容.输出为正5 V直流电压,为其他电路提供电源.
2.3 电机驱动电路设计
电机驱动电路采用L298N驱动芯片,图4中IN1-IN4为控制输入信号端口,当输入信号端IN1接高电平输入端IN2接低电平,电机M1正转,信号端IN1接低电平,IN2接高电平,电机M1反转.当输入信号端IN3接高电平输入端IN4接低电平,电机M2正转,信号端IN3接低电平,IN4接高电平,电机M2反转.
2.4 巡线电路设计
本电路(见图5)采用一体化红外发射接收管,是将红外发射管、接收管紧凑地安装在一起,根据红外线被不同颜色的吸收差别原理设计.当红外发射管和接收管处在黑线位置时,发出的红外光大部分被黑线吸收,也就是无反射光时,当红外发射管和接收管不处在黑线位置时,发出的红外光大部分被反射,被接收管接收.该电路有5路红外发射管与接收管,中间一路主要是保证机器人能沿着路线前进,次外2路主要是当机器人偏离路线时能实现纠正,从而保证回到路线上,最外2路主要是保证机器人能按照路线实现在路口转向.
2.5 土壤检测电路设计[3]
土壤检测电路(见图6)是根据土壤的湿度不同导电能力也不同而设计的,调节电阻R25或者探头间距可改变测量灵敏度,实现土壤湿度的检测.确定需要浇水(VL)和水满(VH)时a点的电压值(Va).根据电压设计窗口比较器电路,从而实现当Va<VL时,输出高电平;当VL<Va<VH时输出低电平;当VH<Va时输出高电平.
2.6 超声波发射电路设计
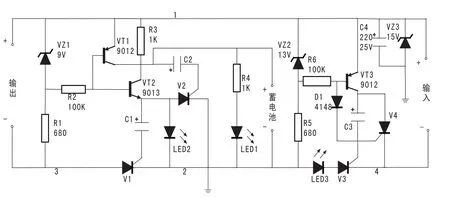
图2 蓄电池保护电路图
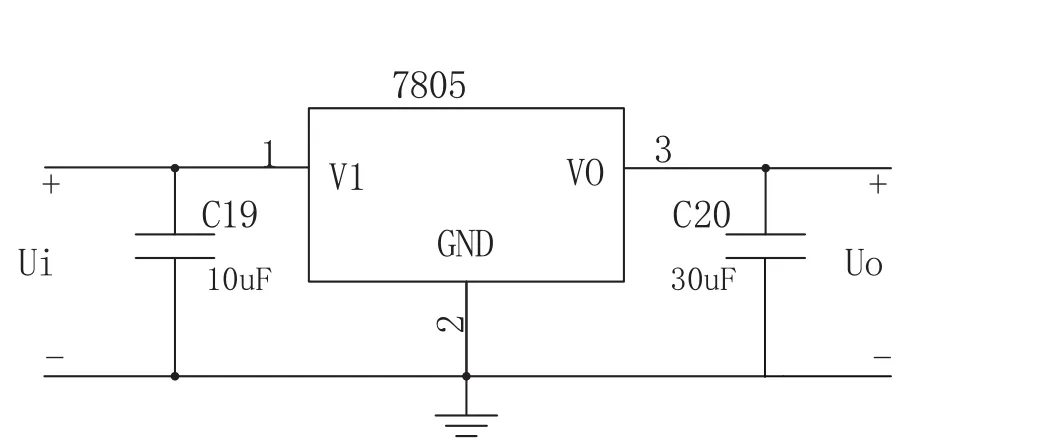
图3 稳压电源电路图

图4 电机驱动电路图
单片机的P1.0口控制超声波发射电路的工作(见图7),晶体管Q2、Q3组成强反馈式稳频振荡器,Q2集电极输出电压的微小变化通过超声波发射探头反馈到Q3的基极,经过Q3放大后又加到Q2的基极被进一步放大,经多次循环形成电路振荡.探头将Q2的输出反馈到Q3的基极上,同时可将振荡器的振荡频率稳定在自身的固有频率上,作为稳频元件使用.超声波发射探头两端为40 kHz的方波,推动超声探头产生40 kHz的超声波.
2.7 超声波接收电路设计
超声波接收电路包括低通滤波电路、放大电路、比较器整形电路(见图8).首先电容C11过滤可能存在的残余直流电压,然后放大电路对微弱超声回波信号进行放大,最后通过带通滤波电路除去其他的干扰信号,放大滤波电路采用了高速精密运算放大器TL082.最后采用一个比较器整形电路.
2.8 压力传感器电路设计

图5 巡线电路图

图6 土壤检测电路图

图7 超声波发射电路图

图8 超声波接收电路图
压力检测传感器用于检测水箱水位的高低.当水箱水位低于某一值时,则发出报警信号,提示人们要对水箱进行加水;当加水到一定水位时,蜂鸣器也会发出报警信号,提示人们停止加水.
压力传感器电路(见图9)由硅压力传感器把压力转换成电信号并放大整形,由于信号微弱,所以经由LM358构成的两极电压放大后由LM358的7脚输出,改变Rp45可以调节基准电压,使电路在传感器不受压力时输出为0,R52及R55为反馈电阻,电容C17、C18均为滤波电容,当压力传感器受到压力作用时,电桥失去平衡,3点的电压与4点不相等,由于3点电压被Rp45固定,所以电压差将由4点输出,经LM358线性放大后将压力信号输出[4].
2.9 红外通信电路设计[5]
红外通信电路(见图10),当P1.2为高电平时推动MOS管导通,LED13发射红外线,当LED14未接收到红外信号时,表现为高阻状态,三极管Q5截止,P1.6输出高电平,当有红外线接收时,LED14导通给三极管提供基极电流,致使三极管Q5饱和导通,P1.6输出低电平.
2.10 报警电路设计
如图11所示当单片机P1.7输出低电平,蜂鸣器发出声音.当单片机P1.7输出高电平,蜂鸣器不发出声音.当水箱水位过低时,单片机P1.7输出低电平,蜂鸣器就发出报警声.

图9 压力传感器电路图

图10 红外通信电路图

图11 报警电路图
3 自动浇花机器人的软件设计
3.1 系统整体流程图
机器人自动浇花流程图见图12.当启动土壤湿度检测装置后,湿度检测装置一直在检测土壤的湿度;当土壤的湿度达到给水的要求时,土壤湿度检测装置通过红外发射管发出信号,启动在远处的太阳能自动浇花机器人.太阳能自动浇花机器人通过巡线传感器向前进,当安装在机器人前方的超声波传感器检测到花盆时,太阳能自动浇花机器人就停止前进,并通过水泵向花盆浇水.在浇花的过程中,土壤湿度检测装置一直在检测土壤的湿度,当土壤湿度到达要求时,太阳能自动浇花机器人停止向花盆浇水,并且返回到出发位置.
3.2 红外巡线软件设计
场地布置为白色底,巡黑线前进,当红外发射管和接收管处在黑线位置时,发出的红外光大部分被黑色吸收,其比较器的正向输入端电压低于反向输入端的电压并输出低电平,LED灯亮.
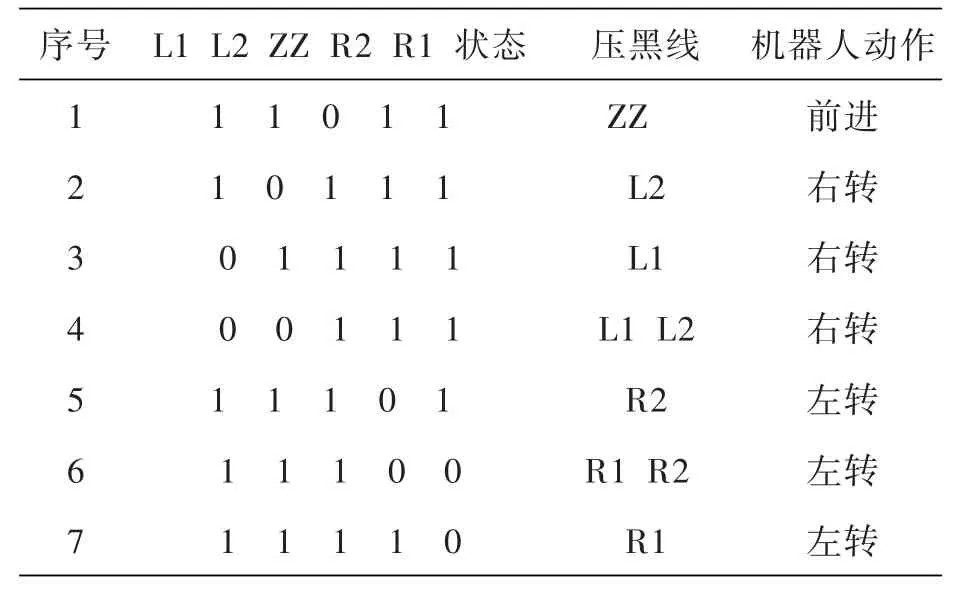
表1 红外巡线电路状态输出表
五个红外发射接收管的状态输出口分别用L1,L2,ZZ,R2,R1来表示(L1为左边第一个;L2为左边第二个;CENTER为中间;R2为右边第二个;R1为右边第一个).其状态输出如表1所示.
4 实验调试
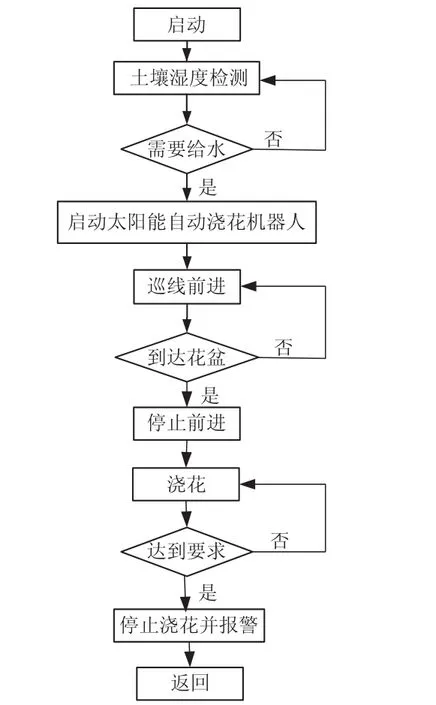
图12 太阳能自动浇花机器人流程图
在完成相关硬件设计的基础上,进行了太阳能自动浇花机器人相关的实验,图(13(a-d))显示了太阳能自动浇花机器人的浇花过程.从实验结果可以看出,本设计是可行的.

图13 太阳能自动浇花机器人浇花过程图
[1]赵丽,张春林.基于单片机的智能浇花系统设计与实现[J].长春大学学报,2012,22(6)650-651.
[2]刘明真,陈鸿.基于单片机智能节水灌溉系统设计[J].学术问题研究,2010(1):75-80.
[3]程捷,何辰.基于单片机的温湿度检测系统设计与实现[J].电子测试,2011(6):56-58.
[4]刘文涛.单片机应用开发实例[M].北京:清华大学出版社,2005:75-75.
[5]唐忠德.红外遥控技术应用研究[M].北京:中国电机出版协会,2000:83-87.
Design of the Solar Automatic Watering Flower Robot
LU Yu-min,MAO Li-min,QIN Jia-juan,LI Zeng-zeng,YE Guo-lin
(School of Electrical and Automation Engineering,Changshu Institute of Technology,Changshu 215500,China)
With the rapid development of science and technology,robotics have penetrated into all areas of our lives.This is a novel application of robots in the home gardening market.At present,the flower device waters the flowers at the fixed time every day,and cannot automatically adapt to changes in the weather.In this paper, the solar automatic watering flower robot depends on the solar panels to provide energy.Once a robot detects the soil moisture,which has an adverse effect on plant growth,it waters flower pots along a specified line until the soil moisture is suitable and returns to the starting point.Experiments show that the solar automatic watering flower robot is simple to operate,easy to use,and meets the automation and intelligence of the modern life.As an environmental protection,and green energy,solar energy plays an increasingly important role in meeting the energy needs of the rapid economic development.
watering flower robot;soil testing;infrared signal
TP368.1
A
1008-2794(2013)04-0104-05
2012-10-17
毛丽民,讲师,硕士,研究方向:机器人与目标跟踪研究,E-mail:maolimin_1981@163.com.
猜你喜欢
中学生数理化·中考版(2022年10期)2022-11-10
数学大王·趣味逻辑(2022年3期)2022-03-17
山西电子技术(2022年1期)2022-02-28
中学生数理化·中考版(2021年4期)2021-07-22
天津农林科技(2020年3期)2020-08-13
电子制作(2019年15期)2019-08-27
科技传播(2019年15期)2019-08-22
汽车维修与保养(2019年2期)2019-06-19
电子技术与软件工程(2017年2期)2017-03-15
西部广播电视(2016年16期)2016-11-09
