二级直线型倒立摆系统的LQR控制探析
2013-03-16 08:29王春平
机电信息 2013年9期
王春平
(杭州佐帕斯工业有限公司,浙江 杭州310018)
0 引言
倒立摆系统是一种多变量、强耦合、严重非线性、自然不稳定的系统,其模型简单但能充分反映很多机械与控制过程中的常见问题,譬如军工航天领域火箭发射的垂直度控制、机器人研究中机器人的行走平衡控制、通信卫星在其预定轨道上的姿态控制等。因而倒立摆理想模型可以验证各种控制理论的有效性,深受广大科技人员的青睐。根据倒立摆的摆动杆个数多少可分为一级、二级等,目前最好的控制是针对四级倒立摆。北京师范大学模糊系统与模糊信息研究中心李洪兴教授提出了“变论域自适应模糊控制”理论,在世界范围内首次成功地实现了四级倒立摆控制仿真实验。线性二次型调节器(LQR)的最优控制[13]是基于现代控制理论发展起来的,通过对倒立摆系统的分析建立其动力学模型,应用状态反馈控制器使得目标函数取得最小值。这种方法具有很好的控制效果,本文即采用此方法针对二级倒立摆进行建模和控制器设计。
1 二级直线型倒立摆的数学建模
二级直线型倒立摆系统的机械部分主要由小车、摆杆1、摆杆2、皮带轮、导轨、传动皮带等组成,电气部分由电机、PWM、功率放大器、传感器、驱动电路以及保护电路组成[4],其简易结构如图1所示。
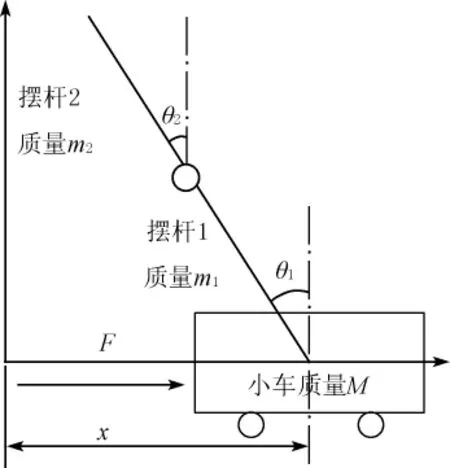
图1 二级直线型倒立摆系统结构示意图
为了方便模型建立,需作如下假设:(1)摆杆1和摆杆2以及小车都是刚体。(2)传动皮带无伸长滑动现象。(3)忽略电极电枢绕组中的电感。(4)忽略实验中的库伦摩擦、动摩擦等。二级直线型倒立摆结构参数如表1所示。
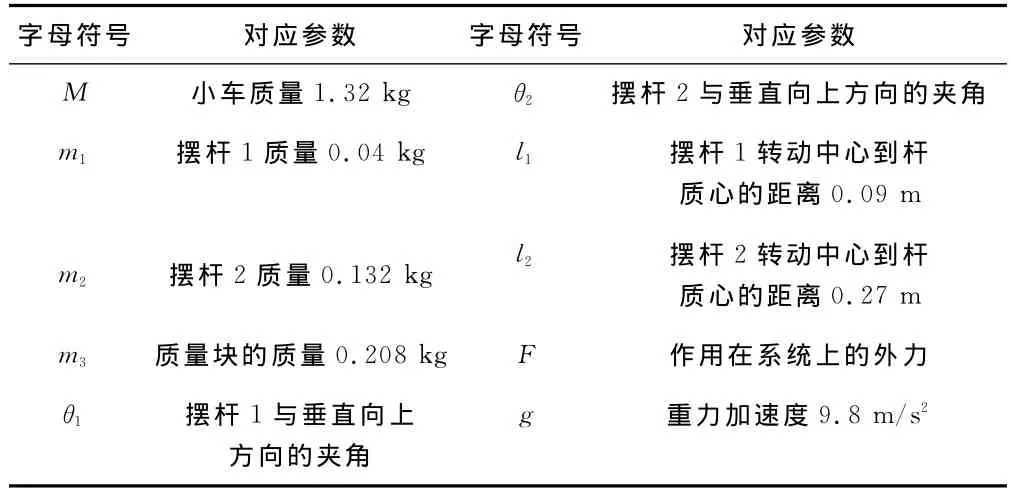
表1 二级直线型倒立摆系统的结构参数
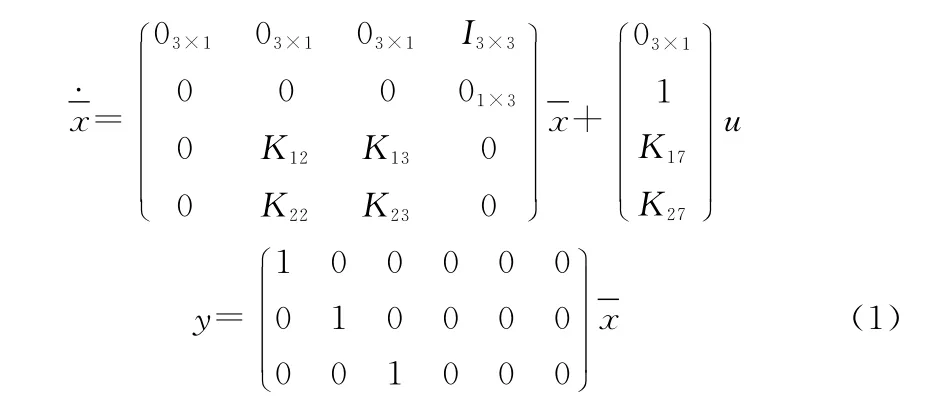
式中,03×1为三行一列且元素均为0的矩阵;01×3为一行三列且元素均为0的矩阵;I3×3为三行三列的单位矩阵。
将系统参数代入式(1)便可得到 K12=77.064 2,K13=-21.192 7,K22=-38.532 1,K23=37.818 6,K17=5.701 2,K27=-0.072 8。
2 二级倒立摆LQR控制与仿真
LQR是应用线性二次型最优控制原理设计的控制器。其任务是当系统状态由于外界干扰偏离了平衡状态时,可以在不消耗过多能量的情况下,快速保持系统状态各分量恢复到平衡状态,且系统是线性的或可线性化的。针对本文研究的二级倒立摆系统的状态方程=Ax+Bu,通过确定最佳反馈控制器u(t)=-Kx(t)中的增益矩阵K,使得性能指标J=达到极小。这里的矩阵Q和R是加权矩阵,反映了设计者对状态x和控制u中各分量重要性的关注程度,最终使系统在控制过程中动态误差与能量消耗以及系统稳态误差综合最优。
基于LQR理论设计控制器时,最关键的一个问题即二次型性能指标的选取。矩阵Q和矩阵R是用来平衡输入量与状态量权重的,对闭环系统的动态性能影响很大。在本文处理对象为二级倒立摆的系统中,Q、R是分别用来对应状态向量x、控制向量u引起的性能度量相对重要性加权矩阵,且Q、R参数以及跟随速度、角速度大小的关系是相互耦合的。本文采用试凑法通过大量的实验与仿真比较来确定Q和R的值,基于MATLAB的强大计算功能及仿真能力,不断调整参数得到设计结果,并绘制出系统的输出响应曲线,控制量加权矩阵分别取如下2组数据时,输出响应曲线如图2所示:(1)R=[1],Q=[100 0 0 0 0 0;0 100 0 0 0 0;0 0 100 0 0 0;03×6];(2)R=[100],Q=[100 0 0 0 0 0;0 100 0 0 0 0;0 0 100 0 0 0;03×6]。

图2 LQR控制二级倒立摆系统时的输出响应曲线
3 结语
本文围绕二级直线型倒立摆系统,基于现代控制理论中的LQR理论,设计了状态反馈控制器,通过大量的实验仿真获得了该倒立摆系统性能改善较为理想的输出曲线。
[1]胡阳,王吉芳.二级倒立摆系统实时稳定控制实验研究[J].计算机仿真,2009,26(9)
[2]张立迎.直线二级倒立摆稳定控制研究[D].济南:山东大学,2009
[3]万力,李湘敏.二级倒立摆系统模型建立与LQR控制仿真[J].湖南理工学院学报,2010,23(3)
[4]固高科技有限公司.固高倒立摆系统与实验指导书[Z],2004
[5]王海英,袁丽英,吴勃.控制系统的 MATLAB仿真与设计[M].北京:高等教育出版社,2009
猜你喜欢
工程技术研究(2021年1期)2021-03-20
塑料包装(2019年6期)2020-01-15
设备管理与维修(2019年14期)2019-06-16
现代机械(2018年5期)2018-11-13
中央民族大学学报(自然科学版)(2016年3期)2016-06-27
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28