
移动机器人底盘控制开关电路的设计与实现*
2013-03-11 10:50马晓丽闫智勇吕雪松
网络安全与数据管理 2013年11期
赵 亮,马晓丽,闫智勇,吕雪松,王 浙
(衢州学院 机械工程学院,浙江 衢州324000)
自第一台西红柿采摘机器人于1983年在美国诞生以来,采摘机器人的研究和开发至今已有30多年,欧美和日本等机器人开发先进国家相继研究了采摘苹果、柑桔、西红柿等水果的智能机器人项目[1-3]。根据对智能机器人的不同理解,目前采摘机器人的研究朝着人机协作型和自主智能型两种不同的方向发展[4]。人机协作型机器人需要人的参与,同自主型智能机器人相比,其优势表现在系统可靠性高、采摘成功率和采摘效率高,所以人机协作型采摘机器人的研究不仅能提高机器人的采摘效率和成功率,还能大幅度降低系统的成本,有利于尽早实现采摘机器人的产业化,因而在机器人研究与开发较发达国家稍落后的中国,开发人机协作型机器人更具有现实意义。本文以人机协作型杨梅采摘机器人移动底盘的控制为研究对象,采用有线控制直流电机的正、反转方案,对控制电路进行了研究与试验,以经济、准确和实用的控制方式实现移动底盘的前进、后退和左右移动。
1 杨梅采摘机器人的移动底盘
基于人机协作思想,西班牙工业自动化研究所开发了一种人机协作型的采摘机器人,如图1所示。该机器人由操作台、轮式移动机构、机械手、末端执行器、激光测距仪以及机器人控制系统等组成。机器人导航和目标定位由操作人员来完成,机器人的路径规划、关节控制以及采摘机构的控制等由机器人控制系统完成[5]。
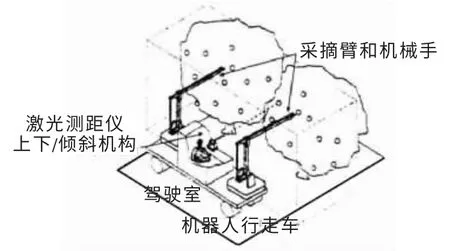
图1 人机协作型采摘机器人
杨梅采摘机器人也是按照人机协作型理念来开发的,该机器人主要用于农业观光游中机器人采摘或机械化采摘项目。该机器人的移动底盘采用履带式双轮直流减速电机驱动,如图2所示,控制要求是能实现车轮底盘的前进、后退和左右转向。由于机器人本体重量较大,电机的功率选型也较大,采用无线遥控方式成本较高,因此在机器人样机研制上采用有线按钮控制方式来实现机器人移动控制。

图2 杨梅采摘机器人移动底盘
移动底盘采用同步带轮结构,用两个24 V直流减速电机驱动左右主动同步带轮,经同步带传动带动从动同步带轮运动,通过控制两个电机使移动底盘运动。运动要求是:两电机正转时机器人前进,两电机反转时机器人后退;电机1正转、电机2反转时机器人右转向;电机1反转、电机2正转时机器人左转向。通过调节电机的不同运行方式来控制机器人的灵活运动(前进、后退和左右转向)。
2 控制方案设计与分析
2.1 船形开关控制方案
按照移动底盘功能要求,首先采用了双刀双掷型的船形开关控制。由于船形开关具有3挡位置,一个开关能够实现控制一个电机的正转、反转和停动,所以用2个船形开关就可以实现控制移动底盘的运动。其动作控制设计见表1,表中的K1、K2代表船形开关,K为电源开关。船形开关控制电路如图3所示。

表1 三档船形开关控制动作表

图3 船形开关控制电路图
该控制方式通过拨动船形开关的3挡位置来实现电机的换向和停动,控制原理简单明了,接线简单,但操作起来要同时拨动两个开关,拨动开关不同步或者在拨动开关中出现误操作时,会产生控制失误并带来安全隐患。如控制机器人的前进,如果拨动时误操作将其中一个开关拨到“反”向,另一个拨向“正”向,机器人就只消耗电能而不能前进;而机器人在正确向前运行时,如果控制者想要其停下,此时若误操作将其中一个开关拨到“停”,或用力过猛把其中一个开关直接拨到“反”时,就有可能造成机器人的侧翻,引起安全隐患和设备损坏。
由上述分析可知,这种控制电路的设计方案简单,所用开关元器件少,但是操作繁琐,容易造成误操作而引起机器人不能运动或产生安全隐患,而且不能实现机器人的点动控制。
2.2 按钮开关单动控制方案
对机器人移动底盘的控制,除了要求有前进、后退和左右转向功能外,还应具有实时点动控制功能,以方便机器人采摘果实时用机器人底盘的移动辅助定位。所以设计了采用按钮开关和继电器等元器件的单动控制方案。
元器件的开关采用按钮开关,选用2脚常开按钮或4脚常开常闭按钮即可。若为4脚按钮,按触点的结构动作为:按钮开关按下时常闭触点1、2断开,常开触点3、4闭合,此时可只接通其常开触点3、4来实现对电机的点位控制。
继电器是一种电子控制器件,它具有输入回路与输出回路之间的互动关系,通常应用于自动控制电路中。它实际上是一种用较小的电流去控制较大电流的“自动开关”,能起到安全、方便的开关作用。该方案采用“DC12V-5A 4开4闭”电磁继电器,1个电机要用2组“继电器+按扭开关”,一组控制正转,另一组控制反转。另外,电机电源是24 V,而继电器电源是12 V,所以电路中还需配置24 V和12 V电源开关各1个。
为了使移动机器人按要求运行方向运动并且能够实现点动控制,设计了按钮开关单动控制电路。实现动作和按钮开关的操作见表2,控制电路如图4所示。
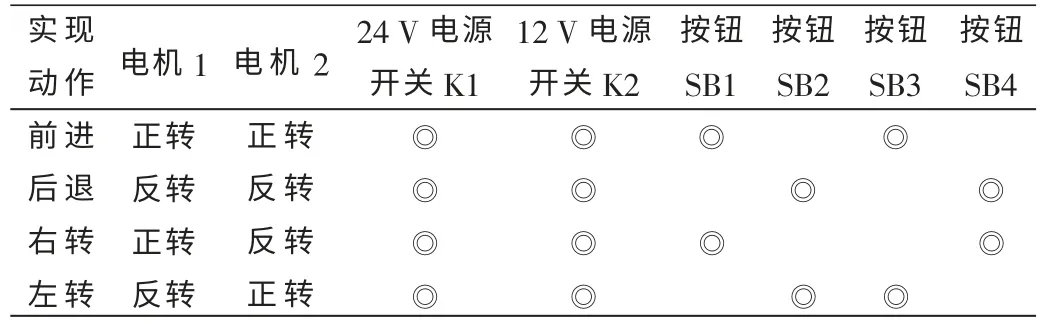
表2 按钮开关单动控制动作表
该控制方案巧妙地运用了电磁继电器的常开常闭触点来对电路进行控制,常闭触点2与电机电源的负极相连,常开触点3与电机电源的正极相连,两动触点1分别与电机的正极和负极相连,控制电源电流通过4、5流入电磁继电器。当按下按钮开关SB1时,电磁继电器J1的线圈通电,吸引动触点1与常开触点3闭合,此时电机接入正负电源开始正转;反之按下按钮开关SB2时,线圈2通电,电机开始反转。即便发生误操作将按钮开关SB1、SB2同时按下也不会发生短路。因此,该电路设计的安全性达到了使用的要求。又因为采用的是按钮开关,可以实现对电机的点动控制,使定位准确度大大提高。但是,这种单动控制方式还是存在一个运行动作需要同时按动两个按钮的问题,若按动按钮不同步会造成控制误差或控制失效。所以这种控制方式对移动底盘的运动控制并不适用,但是对控制机器人关节电机是适用的,2组按钮开关和继电器即可实现对一个关节电机的点动正、反转控制。
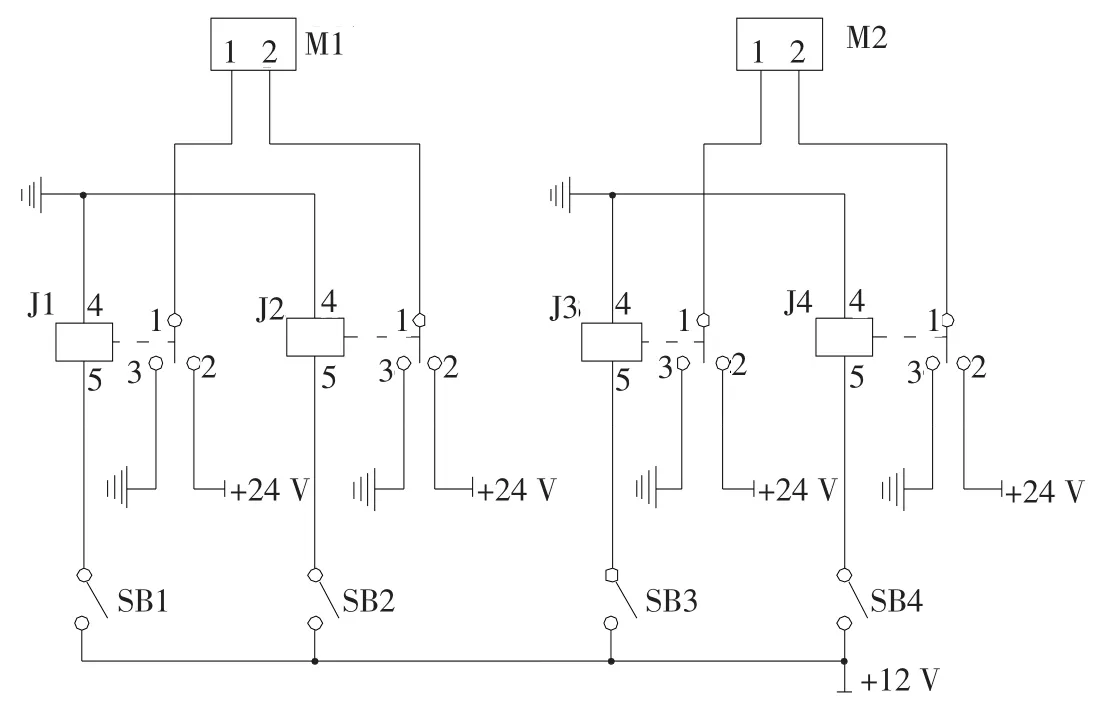
图4 按钮开关单独控制电路
2.3 按钮开关联动控制方案
为了实现按动一个按钮来控制移动底盘的前进、后退和转向控制,设计了按钮开关的联动控制方案。该方案与按钮开关单动控制相同,都是采用“按钮开关+继电器”,为了提高电路的可靠性又加了三级管和电阻等元件[6]。电路设计采用4组“继电器+按钮开关”,其联动控制动作表见表3,电路图如图5所示。
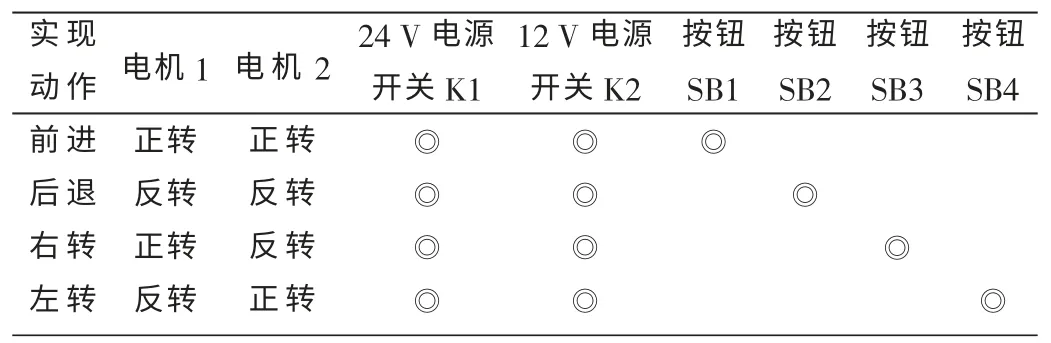
表3 按钮开关联动控制动作表
该控制方案在操作上可实现按动其中一个按钮就可以完成相应的一个动作的执行,操作简单,不存在同时按下两个按钮时不同步而造成的操作失误。只是元器件有所增加,电路制作稍难。
移动机器人底盘采用两个直流减速电机驱动控制其运动方向和运行,即控制这两个电机的正、反转。双联双刀双掷6脚船形开关控制方案所用元器件少,但是按动开关容易造成误操作,由此带来控制失效和出现安全问题,严重时会损坏机器人。而采用按钮开关方案,具有控制电路简单、使用方便、易于维护、抗干扰能力强、控制准确等优点,不用耽心误操作带来的安全问题和设备损坏,关键是按钮操作的点控功能使移动控制得心应手,只是元器件种类和数量上稍多。按钮单动方案与联动方案相比较,单动方案更适合用于机械臂关节电机控制,而联动方案每个动作只需按动一个按钮。综合上述对3种方案的分析和比较,杨梅采摘机器人底盘控制选用按钮开关联动控制方案,机械臂关节电机采用单动控制方案。按照文中电路设计制作了两种按钮控制电路,并对机器人底盘样机和机械臂关节电机进行了实际控制测试,试验结果能满足控制要求。

图5 按钮开关联动控制电路
[1]BULANON D M,KATAOKA T.A fruit detection system and an end effector for robotic harvesting of Fuji apples[J].Agricultural Engineering International:CIGR Ejournal,2010,12(1):1285-1299.
[2]HARRELL R C,ADSIT P D,MUNILLA R D,et al.Robotic picking of citrus[J].Robotica,1990,8(4):269-278.
[3]MONTA M,KONDO N,TING K C.End-effectors for tomato harvesting robot[J].Artificial Intelligence Review,1998(12):11-25.
[4]方建军.移动式采摘机器人研究现状与进展[J].农业工程学报,2004,20(2):273-278.
[5]CERES R,PONS J L,JIMENEZ J M,et al.Design and implementation of an aided fruit-harvesting robot(Agribot)[J].Industrial robot,1998,25(5):337-346.
[6]张树弼.继电器的正确选择与使用[J].家庭电子,2005(1):52.
猜你喜欢
武汉广播影视(2022年6期)2022-12-28
军民两用技术与产品(2020年8期)2020-09-07
汽车维护与修理(2019年3期)2019-08-08
山东工业技术(2019年13期)2019-05-30
汽车维护与修理(2018年5期)2018-09-29
汽车维护与修理(2018年23期)2018-07-03
汽车维护与修理(2017年5期)2017-11-17
学习月刊(2016年19期)2016-07-11
专用汽车(2016年4期)2016-03-01
汽车维修与保养(2015年6期)2015-04-17
