利用弹射式无人机进行航空摄影若干问题分析
2013-03-03 11:44石雅文
城市勘测 2013年3期
石雅文
(辽宁地矿测绘院,辽宁沈阳 110121)
利用弹射式无人机进行航空摄影若干问题分析
石雅文∗
(辽宁地矿测绘院,辽宁沈阳 110121)
针对目前无人机航空摄影测量系统具有搭载改装检校后非量测相机的相机内方位元素的不稳定以及飞行姿态的不稳定两大问题进行了分析,并提出了解决思路,并通过生产实践验证了文中提出的解决方案。该方案能在一定程度上缓解由于相机内方位元素的变动以及相机倾角过大产生的数学精度问题,并对无人机进行测绘航空摄影根本性精度解决提出了建议。
无人机;航空摄影;内方位元素;航摄误差
1 引 言
近年来,无人机作为一种新型的遥感平台,已开始在灾情监测、应急搜救、生态环境监测、土地利用调查、作物长势监测、城市管理、国防事业等领域都得到越来越广的应用。与传统摄影测量技术相比,无人机航空摄影测量具有以下几个方面的优势:①低廉的人力、物力、经济成本;②及时和灵活,无需机场起降,可以快速、机动、灵活地对目标区域进行观测;③高效的应急反应能力,可以在恶劣的天气条件下和灾难环境中完成任务;可在云层下低空飞行,有效地对人机航测中因云层遮挡等影响而留下的漏洞区域进行补充航摄。
为了提高测绘的技术水平和效率,我院于2012年采购了武汉大学与武汉海地测绘科技有限公司联合研制的弹射式无人机系统。该系统搭载改装后的CCD相机作为传感器,利用两轴稳定平台进行旋偏和侧滚姿态改正,采用定点曝光模式进行航空摄影。它采用弹射起飞,伞降模式,满载荷重量为30 kg,采用两冲程110CC发动机作为动力,具有较好的抗风能力和姿态稳定性,续航时间可达4 h,非常适合测绘航空摄影。我院多次采用该无人机系统进行了航空摄影项目生产实践,在生产应用上取得了一些成果。但是,由于无人机姿态不稳定性和采用传感器的非量测性的影响,利用无人机进行测绘航空摄影项目生产仍然存在一些问题。本文试图通过这些项目实践中出现的问题进行归纳分析,提出尝试性解决方案,以期使得无人机航空摄影技术得以改进,以便更好地服务于国内外大比例尺地形图航测。
2 存在的问题及产生误差分析
通过生产实践,我们发现目前该系统主要存在两个主要问题:相机内方位元素的不稳定和飞行姿态的不稳定两大问题。
(1)相机内方位元素的不稳定分析
本系统配置的传感器为改装加固后的CCD相机,其中镜头与机身之间采用粘接技术连接固定,在实际生产作业过程中,通过不同架次飞行后相机的检校,发现由于震动、起降冲击、温度、气压等因素的影响,使得该相机的内方位元素发生变化,也就是说采用改装技术的相机,在上述因素的影响下,内方位元素产生了变化,从而影响到像平面坐标系和影像的焦距。我们在进行无人机航空摄影测量时发现,随着飞行架次的增加,无人机航摄影像成图数学精度呈线性下降的趋势。
(2)飞行姿态的不稳定分析
尽管该系统加装有两轴(侧滚和旋偏)稳定平台以及飞机自身以45 Hz的频率作仰俯改正,使得相机光轴保持近似竖直,但由于改正的延时性以及空中气流突变的影响,在气流变化较大的地区以及山区作业时,总存在姿态角过大的曝光相片,从而使得对应模型高程误差较大或者超限。
由于气流的突变,在飞机姿态(仰俯、测滚)突变时,稳定平台未能及时有效校正时相机进行了曝光,此时曝光的相片往往倾角超限,从而造成立体模型高程误差变大甚至超限。
一般来说,竖直摄影立体像对高差公式为:

而实际航空摄影每一立体相对均含有倾角误差,那么对于含有航摄像片倾角的竖直摄影的立体像对来说,如果仅以一次项的精度要求,则应考虑加入左右视差的一次项式的改正数:

这样就把它改化为理想像对下的△p,如果未进行一次项改正数的改化,将会使竖直摄影立体模型在高程方面产生变形,这一变形就是我们所说的高程扭曲,这一扭曲将在航内立体采集时对作业员造成立体视觉错误,如水塘面凹曲等,从而造成航测高程误差伸直误差超限。
那么由于δ△p引起的高程误差为:

当像对的外方位元素为已知时,式(3)中的像点坐标为变数,那么可以将高程扭曲公式表达为:

由此可见,由于像片倾角引起的高程误差曲面为一个双曲线的抛物面。
近期在海拉尔1∶2 000无人机低空摄影航测项目生产中,空三加密后选取有仰俯和侧滚倾角较大的若干立体像对,进行航测内业高程与外业实测高程的比较,侧滚角较大的立体模型,从误差分布上来看,表现为一种抛物面的扭曲变形,立体效果这种抛物面扭曲变形也较为明显。同样,我们再选取仰俯角较大的立体相对量测结果,进行中误差统计,从误差分布上来看,类似一个双曲面的扭曲,同样,在立体模型下,这种扭曲在水域面感觉非常明显。
这一误差曲面对实际航空摄影作业具有理论指导意义,在实际生产作业中,特别是无人机等小型飞行器作为遥感平台,其飞行姿态控制的好坏,也将影响到最终航测成图的高程精度。
3 解决方案
从以上问题分析来看,无人机应用于测绘生产,针对本文提出的无人机采用改装相机内方位元素的不稳定性问题,这种不稳定性,主要是由于无人机在起降过程中剧烈的撞动造成的影响,在生产实践中,我们采用每架次飞行数据进行单独的相机检校,较好地控制了内方位元素的变动,从而也有效地控制了立体量测精度。为此,我们做了如下测试:
在第一架次飞行前,我们对相机进行室内检校,获取相机的畸变参数和内方位元素,结果如表1所示。无人机起降两个架次后,我们再对该相机进行室内检校,获取另外一组畸变参数和内方位元素,结果如表2所示。

第一次相机检校主要参数 表1

第二次相机检校主要参数 表2
将两个架次的影像用第一次检校结果进行纠正,然后加密量测;再将两个架次的飞行影像分别用两组检校结果进行纠正,空三加密利用两个相机文件作业;最后对两组加密结果的第二架次航测立体模型进行检测点量测和中误差统计。由于第二架次航测影响较大,所以采用第二架次航测加密模型进行立体量测,与野外实际采集明显地物点进行误差统计,结果如表3所示。
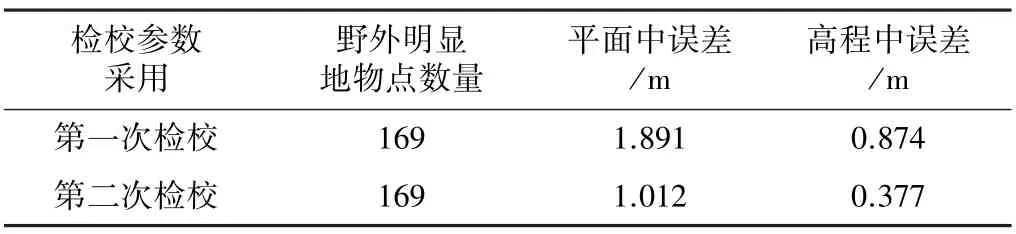
两次加密结果误差比较(成图比例尺1∶2 000) 表3
由上述数据可以看出,由于振动等因素的影响,相机的内方位元素已经发生明显改变,显然采用外部加固技术是不能很好地保持相机内方位元素稳定性的;从两组立体模型采集的地物点中误差来分析,尽管相机内方位元素发生了改变,但将相机不同架次的检校结果分别用于不同的飞行架次,是可以获得较好的量测结果的。
此外无人机由于重量较轻,容易受气流等因素的影响,从而对飞行姿态及相机姿态造成影响,那么我们在加装相机稳定平台的同时,在进行测量项目的飞行时,尽量选择良好的天气进行飞行作业。同时结合上面推导出的像片倾角引起的高程误差曲面对测量结果进行高程误差的改正。
4 结 论
利用无人机搭载改装检校后的非量测相机,在进行有效的控制情况下,可以经济高效地解决小面积及局部地形图修补测等测绘工作,具有一定的生产应用价值。本文针对目前无人机系统具有机搭载改装检校后非量测相机的相机内方位元素的不稳定以及飞行姿态的不稳定两大问题进行了分析,并提出了解决思路。通过我们的生产实践发现,文中提出的解决方案能在一定程度上避免由于相机内方位元素的变动以及相机倾角过大产生的高程扭曲等问题,但是还不能从根本上解决无人机姿态易变及非量测相机改装的缺陷。要彻底解决这些问题,还需要在无人机用相机本身稳定性方面作更深入的研究,特别是相机硬件本身进行特别设计,以解决相机内方位元素稳定性及航向像移补偿等方面,真正实现无人机进行测绘航空摄影。
[1] CJJ8-99.城市测量规范[S].
[2] 张祖勋,张剑清.数字摄影测量学[M].武汉:武汉大学出版社,1997.
[3] 冯文灏.关于近景摄影机检校的几个问题[J].测绘科学,2000(10):13.
[4] 黄世德.航空摄影测量学[M].北京:测绘出版社,1987.
[5] 袁修孝,高宇,邹小荣.GPS辅助空中三角测量在低空航测大比例尺地形图成图中的应用[J].武汉大学学报·信息科学版,2012,37(11):1289~1293.
[6] GB 7930-87.1∶500,1∶1000,1∶2000地形图航空摄影测量内业规范[S].
《西宁市高精度三维大地测量基准的研究与建设》项目通过验收
(本刊讯)2013年4月10日下午,由西宁市国土资源局组织专家,在西宁市测绘院召开《西宁市高精度三维大地测量基准的研究与建设》项目验收会。该项目由西宁市测绘院和武汉大学测绘学院共同建设完成。验收会专家组组长为中国工程院院士刘经南(原武汉大学校长),成员为国家测绘地理信息局发展研究中心主任张辉峰、国家基础地理信息中心大地测量部主任张鹏、中国测绘科学研究院副主任文汉江、天津市勘察测绘研究院高级工程师窦华成院长、常州市测绘院高级工程师刘全海院长、青海省测绘产品质量监督检验站高级工程师李伟东站长。青海省测绘地理信息局副局长卢晓平、西宁市国土资源局局长包维珍、西宁市测绘地理信息局副局长张志山等参加了会议。
在听取完项目工作报告和技术报告后,经与会专家质询和评议,一致认为:《西宁市高精度三维大地测量基准的研究与建设》项目符合三维大地测量基准规范要求,建成的由56个控制点组成的西宁市高精度GPS控制网,布设均匀,网形结构合理,数据处理严密,点位精度高,其控制点符合85国家高程基准和56黄海高程基准,同时也符合国家测绘基准,其精度为厘米级,坐标能够相互转换。该项目利用高频地形数据采用高阶积分核函数方法确定了精密重力大地水准面,建立了分辨率为2″×2″、精度优于1.0 cm的西宁市高精度似大地水准面精化模型。
该项目的建成,极大地提高了高精度空间定位技术,将满足基于西宁市大地数据库、专题GIS研制、4D产品开发、GPSRTK测量的“数字西宁”基础地理信息建设需要,改变了传统的水准测量和GPSRTK作业模式,能够为西宁市经济建设、领导决策、重大工程建设的顺利进行以及西宁市社会经济可持续发展提供高精度、多功能的测绘技术保障。
(西宁市测绘院办公室供稿)
Analysis of theAerial Photogrammetry by the UAV
Shi Yawen
(Institute of Surveying and Mapping of Liaoning Geological&Mineral Bureau,Shenyang 110121,China)
In this paper,it analyzes twomain problems of the internal orientation elements instability,in view of the UAV aerial photogrammetry system withmodified and calibrated non-metric camera and flightattitude instability,and put forward a solution,and the solution proposed in this paper is verified by the production practice,it can alleviate themathematical precision due to the inner orientation elements change and the camera angle big change.And puts forward some suggestions to solve the UAV aerial photography fundamental accuracy of surveying and mapping.
UAV;aerial photogrammetry;inner orientation element;error
1672-8262(2013)03-89-03
P237
B
2013—05—24
石雅文(1960—),男,高级工程师,副总工程师,主要从事测绘技术管理工作。
国家973计划资助项目(2012CB719902)
猜你喜欢
西宁市人民政府公报(2022年6期)2022-09-22
西宁市人民政府公报(2022年6期)2022-09-22
西宁市人民政府公报(2022年7期)2022-09-22
西宁市人民政府公报(2022年7期)2022-09-22
测绘通报(2019年4期)2019-05-10
航空知识(2019年1期)2019-01-11
环球飞行(2018年7期)2018-06-27
传媒评论(2017年2期)2017-06-01
传媒评论(2017年2期)2017-06-01
测绘科学与工程(2017年5期)2017-05-07