
高精度测量仪器在基坑监测中的应用
——以济南市大明湖路武岳庙历史建筑保护基坑监测项目为例
2013-03-03 09:36全金谊张兴国王磊
城市勘测 2013年2期
关键词:预测
全金谊,张兴国,王磊
(济南市勘察测绘研究院,山东济南 250013)
吴飞宇∗
(蚌埠市勘测设计研究院,安徽蚌埠 233000)
高精度测量仪器在基坑监测中的应用
——以济南市大明湖路武岳庙历史建筑保护基坑监测项目为例
全金谊∗,张兴国,王磊
(济南市勘察测绘研究院,山东济南 250013)
以济南市大明湖路武岳庙历史建筑保护基坑监测项目为例,论述了高精度仪器(DINI12电子水准仪、TS30全站仪)在基坑监测中的应用,并将基坑监测中可能遇到的问题进行了论述并提出了预防和处理的方法,结合实际生产探讨了两种高精度仪器的特点并介绍了它们在基坑沉降、位移等监测过程中测量方法的应用。
基坑监测;高精度;DINI12电子水准仪;TS30全站仪;沉降;位移
1 引 言
随着城市的发展,土地可利用面积日趋减少,随之而生的是高层建筑物的不断增多,在这些工程中,基坑开挖会对周围建筑物、路面、地下管线的稳定造成一定的影响,同时由于周围建筑物的挤压作用,可能会导致基坑塌陷,因此要进行基坑监测。
基坑监测按内容分为沉降和位移监测。沉降是指建筑地基、基础及地面在荷载作用下产生的竖向移动,包括下沉和上升[1]。位移是指建筑产生的非竖向变形[1]。
随着仪器设备的不断更新,高精度仪器已在沉降监测中普遍使用,本文以济南市大明湖路武岳庙历史建筑保护基坑监测项目为例,以天宝DINI12、徕卡TS30为例对基坑监测(以二级监测为例)中需要注意的问题及测量方法探讨。
2 DINI12在沉降观测中的应用
在基坑沉降观测中,以天宝新DINI12为例,它每千米往返测高差中误差为0.3 mm,测量时间仅3 s,最短视距达1.5 m,是精度最高的电子水准仪。而且当尺子倾斜、倾斜超出仪器读数稳定性范围、震动过大超出仪器读数稳定性范围、最大视距超限、最小视线高度超限、最大视线高度超限、最大站差超限、多次读数标准差超限时均可以自动报警。对于一般的基坑监测项目,沉降路线一般在1 km~2 km,这样就大大提高了观测精度。对于基坑监测这样精密测量能更好体现沉降点的沉降量。
在进行沉降观测作业过程中要着重注意以下几点:
(1)进行基准点观测时,要进行往返观测,当返测开始时两尺应互换位置,而且首次观测要独立进行两次。而且要根据基坑开挖及基坑水位降水进度及时对基准点进行复测。
(2)对沉降点进行首次观测时,必须进行独立两次往返观测。
(3)视线高度,最低为0.3 m,最高为2.8 m(3 m尺长),最长视距不能超过100 m。
(4)一般规模工程只需一台水准仪和配套水准尺,在项目开始前,要对所能用到的水准仪、水准尺进行鉴定,未经过鉴定的仪器在观测过程中出现粗差是无法正确找到的;并对不同的尺进行零点误差校正,方法为在同一尺台上分别对所用水准尺进行观测,如果读数在1 mm内则不需要改正,超出则要进行改正;
(5)如果用电子水准仪,每天施测前必须进行i角的检测,i角不应大于10″。《建筑变形测量规程》(JGJ8-2007)中规定应避开日出日落1 h以内,正午前1 h、后2 h。
(6)因为沉降点本身变化较小,所以作业方法应严格按照规范,即要遵循固定仪器、固定人员、固定路线,这样可以减小误差。特别是转点和监视点应固定,因为仪器的i角对监视点的影响会导致数据出现粗差,在粗差数值较小时将直接导致对沉降量变化的正确判断。
(7)作业过程中,要对每个监测点的实时高程与前几期数据进行比较,当某个点发生较大变化时,大多情况是粗差导致的,这样可以及时发现粗差的存在、提高工作效率。
(8)要在每期观测完毕两天内进行数据处理,根据沉降量绘出沉降曲线图,当某个观测点出现高程突变时,应分析原因。如果是正常沉降,则应向甲方通告;如果是外界原因导致的则应分析原因并在数据报告中叙述。
3 TS30在位移观测中的应用
基坑位移观测采用徕卡TS30高精度智能型全站仪,TS30采用全新的压电陶瓷驱动技术(180°/s转速)比使用传统马达驱动的全站仪的效率整整提高了3倍,而且在一测回观测过程中半测回结束后可以自动进行倒镜测量,经鉴定其一测回水平方向中误差为0.44″(标准精度为0.5″),ATR(自动搜索)角度精度为1″,测距精度为0.39 mm+0.10 ppm×D(标准精度为0.6 mm+0.10 ppm×D)。该仪器有自动搜索、自动观测(多测回测角软件)的功能,测角最佳搜索距离为200 m[3],一般基坑监测点位距离均小于200 m,可以满足二级监测精度要求。
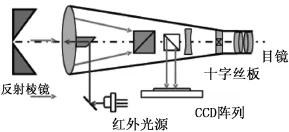
图1 TS30ATR望远镜结构示意图
TS30配备了由徕卡上海技术中心开发的多测回测角软件,用于基坑位移监测点的自动观测。原理是方向观测法,在工作基点(固定观测墩)上架设全站仪,通过测角测边的方式获得监测点数据,然后内业进行计算坐标,并与之前所测数据进行比较得到其位移变化量。软件的使用流程为:设站(配起始方向)-设定限差-目标点学习-自动观测。其中在目标点学习过程中,不需要精确瞄准目标棱镜,只需将ATR功能打开并粗略瞄准,按照方向观测法进行半测回作业,在进行学习时要选择正确的棱镜类型,因为学习过程中选定的棱镜类型在自动观测时将被继承。
软件有规范中涉及的多种限差检核(包括测回较差、2C互差、测回间2C互差、读数差、归零差及垂直角各种限差等等),可以真正做到在测量的过程中对测量数据进行监督检查,保证测量成果的可靠性,并且观测的数据导入由徕卡上海技术中心开发的多测回测角软件后,可以生成各种报表,如水平角观测记录表、垂直角观测记录表、平距及斜距观测记录表等等,同时允许输出专业平差软件所能识别的文件格式,如图3所示为PDF格式文件,一旦生成不允许修改,能保证数据的原始性,非常方便。
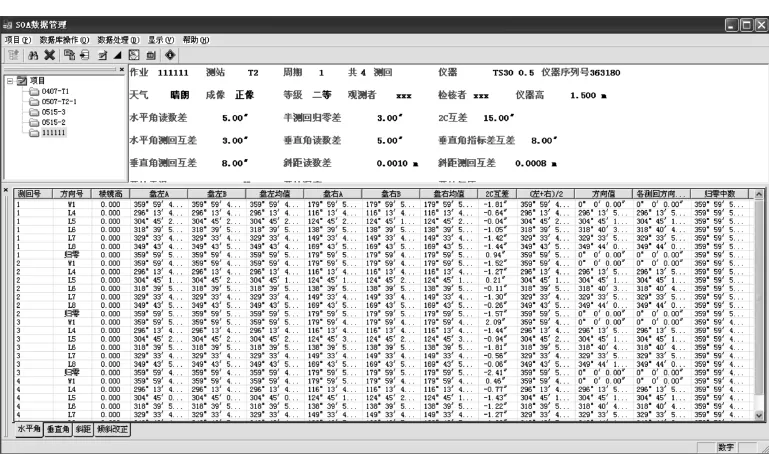
图2 多测回测角软件界面图
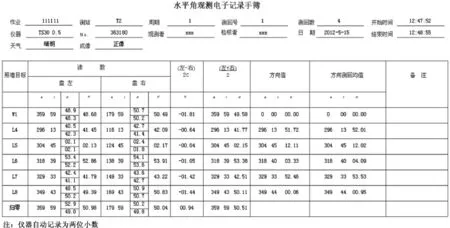
图3 自动生成的水平角观测记录手簿
其他位移监测方法有:视准线法、小角度法、前方交会(测角、测边交会)、极坐标法等,其中视准线法适用于观测点在同一条线上点,在基坑两端埋设2个永久控制点,在这2点之间埋设一排观测点、定期观测这排点偏离固定方向的距离,并进行比较,即可得出这些测点的水平位移量。当基准线太长时,目标模糊,读数照准精度太差;且后视点与测点距离相差太远,望远镜调焦误差较大,无疑对观测成果有较大影响。另外此方法还受到大气折射等因素的影响[4]。
小角度法适用观测点零乱,不在同一直线的情况下,测出各点的水平角度和距离,然后用计算公式计算出本次偏移值和上次的相减即是这次的位移沉降量。须场地较为开阔,基准点应该离开监测区域一定的距离之外,设在不受施工影响的地方[5]。
前方交会(测角、测边交会)由于受测角误差、测边误差、交会角及图形结构、基线长度、外界条件的变化等因素影响,精度较低。另外,其观测工作量较大,计算过程较复杂,故不单独使用,而是常作为备用手段或配合其他方法使用[6]。
极坐标法:边角交会使用方便,尤其是利用全站仪进行测量可以直接测得坐标,简单快速。但精度较低,适用于精度不是很高的水平位移监测工作。
利用导线法进行观测,虽然方法和极坐标法相似,但精度较极坐标法有很大提高,首先是对边、角分别进行4测回观测,增加了检核条件;其次利用TS30多测回自动测角软件进行自动观测,杜绝了人为操作误差,大大提高了观测精度。
在进行位移监测作业过程中要着重注意以下几点:
(1)项目开始前,应对全站仪、棱镜、底座等设备进行年度鉴定。
(2)进行基准点及工作基点观测时,要进行左右角观测,并在每个测回间要人工进行配置读盘。计算坐标时平距值要取往返测均值。
(3)在测距前要将温度、湿度、气压值输入到全站仪中进行距离自动改正,以消除外界因素对测距影响。内业时还要根据仪器鉴定证书上测定的数值进行加、乘常数改正。
(4)要在每一站对仪器的气泡进行校正,选择l、t校正菜单对一起的补偿器纵向和横向指标差进行改正,而且要根据测量数据情况定期校正其他改正数,如竖直角指标差(i)、水平照准误差(c)、横轴倾斜误差(a)及ATR零位误差(ATR)。
(5)在进行自动观测目标点学习时,一定要选对棱镜类型,因为在自动观测时会默认学习时的棱镜类型。
(6)当采用钢桩标志进行位移测量时,由于标志的埋设不可能是完全竖直的,在安置棱镜时势必会产生偏差,实践得到粗差可达到1 mm,对于基坑监测是不允许的。根据经验,在首次观测时,对棱镜和标志点进行配对,在对好位置后,用标签纸(其他有竖直线的纸张均可)粘贴在棱镜和标志上,每次观测时将棱镜拧到底然后再倒回初始安置状态使得标签纸上下两条线重合。在以后各期观测时可以避免棱镜安置带来的粗差,如图4所示。

图4 棱镜安置示意图
(7)要在每期观测完毕两天内进行数据处理,根据位移量绘出位移曲线图,当某个观测点出现突变时,应分析原因。如果是正常位移,则应向甲方通告;如果是车辆碾压、施工破坏等外界原因导致的则应分析原因并在数据报告中叙述。
4 结 论
基坑监测具有时效性、高精度性,用高精度仪器进行基坑的沉降及位移监测,能够为施工开展提供及时、准确、方便的反馈信息,节省了时间,提高了工效,相对于其他仪器的方法,有很大的优越性,同时也保证了精度,为现场监测人员提供了一种可行的监测方法。
[1] JGJ 8-2007.建筑变形测量规范[S].
[2] JGJ120-99.建筑基坑支护技术规范[S].
[3] 徕卡TS30/TM30用户手册1.1版中文[Z].2010.
[4] 谷川,张岳.几种水平位移监测方法的分析和比较[J/ OL].中国科技论文在线.
[5] 徐汉涛.小角法水平位移观测的误差分析[J].南通工学院学报,2001(3):37~40.
[6] 周西振.前方交会法测定变形监测点最佳交会图形的探讨[J].勘察科学技术,2002(3):53~55.
[7] 余建生.测边前方交会法在广蓄上库坝的应用[J].水力发电,2001(11):222~225.
[8] 樊志军,李红兵.极坐标法测设平面位置的精度分析[J].地矿测绘,2004,20(4):12~14.
基于灰色神经网络模型的基坑变形预测研究
吴飞宇∗
(蚌埠市勘测设计研究院,安徽蚌埠 233000)
摘 要:结合灰色GM(1,1)模型和BP神经网络模型各自的优缺点,建立了灰色神经网络组合模型,并采用该模型对实际的监测数据进行处理和分析。结果表明,灰色神经网络充分发挥了灰色模型和神经网络模型的优势,取得了较好的预测精度,能够满足实际应用的需要。
关键词:灰色模型;灰色神经网络;预测
1 引 言
随着我国社会经济的快速发展和城市规模的不断扩大,各项大型工程的建设也在蓬勃兴起,从而带动了基坑工程的快速发展。基坑工程具有面积大、深度大、造价高及施工难度大等特点,其稳定性和安全性越来越受全社会的普遍关注,因此变形预测和预报成为一项十分重要的工作[1]。基于基坑的结构类型、组成物质的物理学性质、外力作用的多变性和不确定性,很难建立合适的确定性模型。为了寻找一种有效的方法揭示变形监测数据的内在结构和规律,可以建立动态模型,来预测变化趋势。目前用于变形预测模型有很多种[2],如回归分析模型、时间序列分析模型、灰色系统模型、神经网络模型、卡尔曼滤波模型、小波分析模型等。这些模型各有特点,适合不同的场所。灰色系统模型适合于“小样本、贫信息”等单一的指数增长模型,对非线性和不确定因素的数据序列进行预测。但是对于序列数据出现的突变和异常情况难以处理,使得预测误差大幅度升高。而神经网络模型具有并行处理、信息分布式存储、容错能力强、自适应学习功能等优点,可以对预测的突变数据进行学习,来对出现的特殊情况进行预测。然而神经网络也有自身的不足,它需要有大量的训练样本,训练样本不但数量多,还需要具有代表性,在实际工程中难以满足。本文讨论的灰色神经网络模型是一种组合模型,它集中了灰色理论和人工神经网络模型二者的优点,通过灰色理论对原始数据进行累加生成,突出趋势的影响,使得神经网络的非线性激励函数更易于逼近,减小不确定成分对灰色理论预测值的影响,从而提高预测结果的精度。
2 灰色神经网络模型
2.1 GM(1,1)模型的建立[3][4]

对^x(1)(k+1)进行一次累减,即可得到的初始数据序列的还原值:

通过GM(1,1)建模的整个过程可以看出,其原理是将非负原始序列作累加生成,使其呈现指数特性,并在指数函数类中找到生成函数,建立微分方程去逼近生成序列。
2.2 BP神经网络模型
在各种神经网络结构中,BP神经网络是目前应用较为成功和广泛的神经网络,它属于一种前馈型神经网络。BP神经网络不但有输入层节点(单元)、输出层节点,而且还有一层或多层隐含层节点,层与层之间多采用全连接方式,但同一层之间的节点不存在互相连接[5]。BP神经网络具有误差反向传播算法的学习过程,通常包括信息的正向传播与误差的反向传播。
第一阶段,正向传播过程:输入层神经元通过接受外界的输入信息,并传递给中间层神经元,中间层神经元负责前后层之间的信息交换,按照信息变化能力的需求,进而确定出中间层设计的隐含层的数量,最终将信息传到输出层,经过进一步的处理,完成一次神经网络学习的正向传播处理过程,并由输出层把信息处理结果输出外界。
第二阶段,反向传播过程:若网络的输出和期望输出不符时,网络就会进入误差的反向传播过程,误差通过输出层,通过采用误差梯度下降的方式来调整各层权值,并向隐含层、输入层逐层反向传播。
这两个阶段的重复进行,使得各层权值不断修正和优化,是神经网络学习训练的过程,该过程不断进行直到网络的输出误差最小,或达到预定的学习次数为止。
2.3 灰色神经网络组合模型[6,7]
灰色神经网络的组合预测模型是将灰色GM(1,1)模型和BP神经网络模型相结合,并充分发挥灰色系统和BP神经网络模型各自的优势,实现两者优势互补,从而提高计算精度和运算能力,更好地解决实际工程中复杂的不确定问题。
灰色神经网络组合模型的建模原理是采用灰色GM(1,1)模型对原始数据序列进行预测,并对原始数据进行拟合求出残差序列,再使用BP神经网络对灰色GM(1,1)模型预测出来的残差序列进行修正,将灰色GM(1,1)模型预测出来的数据和BP神经网络模型修正后的残差序列进行组合,最终得到组合模型的预测结果。在BP神经网络训练过程中,网络中只有一个输出,输出层采用线性转换函数,就可以较好的逼近任意非线性函数,隐函数的结点个数根据具体情况确定,具体实施步骤如下:
采用BP神经网络进行残差修正的预测模型流程,如图1所示。
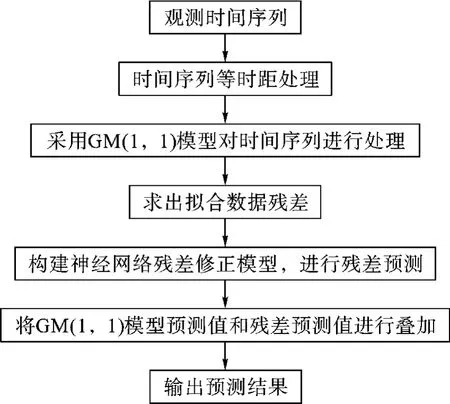
图1 灰色神经网络模型流程图
3 实例分析
某大型深基坑工程位于合肥滨湖新区地段,基坑开挖深度11 m~14 m,基坑工程类别为一级。该场地地下水类型主要有上层滞水、第四系松散岩类孔隙裂隙水。土层滞水主要赋存于人工填土层中,水位不连续,变化幅度大,主要接受大气降水和地表水体的补给。基坑线路东侧沿线分布有多个水塘,部分坑内有积水。水坑均为雨季雨水汇集形成,个别水坑在线路上方。基坑施工过程中,若发生较大范围的土体变形,造成边坡土体开裂,会导致水塘内积水渗入基坑,从而影响基坑施工安全。在此期间,为实时了解基坑在开挖过程中的变形情况,对该基坑进行了定期观测。其中基坑的沉降监测点位布设如图2所示。
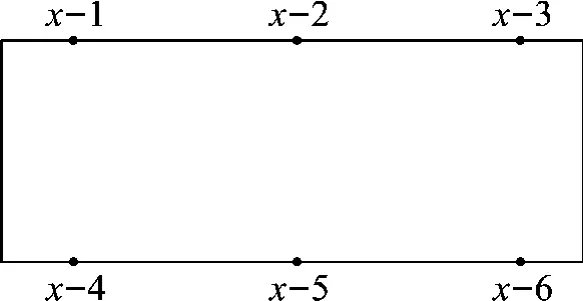
图2 基坑沉降监测点位布设图
为了检验灰色神经网络模型在变形监测数据预测中的效果,对该基坑冠梁上监测点x-2的沉降数据数据进行计算分析。这里选取4个月的监测数据,时间间隔为4 d,共计22次数据,分别用3种模型进行预测分析。采用前19次实测数据建立相应模型,对后3次数据进行预测,将获得的拟合结果和预测结果同实测数据进行比较分析。通过MATLAB进行编程计算,可得GM(1,1)模型拟合结果如表1所示。相对误差的计算公式为:

式中:|ek|为残差,xk为原始值即为本期沉降量。
灰色神经网络组合模型是以GM(1,1)模型计算出来的残差序列建立等维信息BP神经网络模型,通过MATLAB软件[8]建立一个三层的BP神经网络:输入层、隐含层和输出层。在本例计算中,输入层单元为4个,输出层单元为1,隐含层采用tansig(双曲正切S型传递函数),输出层采用purelin(线性传递函数),通过traingdm(梯度下降动量BP算法函数)对网络进行训练,最大训练次数取2 000,动量因子取0.9,学习速率取0.1,训练目标误差取0.01,每20步显示一次。为了加快BP神经网络的收敛速度,在样本数据进行学习训练之前,需对数据进行归一化处理,将处理后的数据加载到神经网络中进行学习训练。BP神经网络在学习训练过程中,通过不断地调整神经元的个数,对产生的误差进行对比,选取合适的神经元个数。具体操作:以数据序列第1次~4次的实测数据作为输入层,第5次作为输出;再以时间序列第2次~5次的实测数据作为输入层,第6次数据作为输出,以此类推,利用这19组数据对BP神经网络结构进行学习训练,经不断调试发现当隐含层节点个数取为9时,网络预测误差达到最小,减少或增加节点数均会增加网络的预测误差,通过训练好的网络结构,来预测出20次~22次数据,将输出的结果进行反归一化处理,同实测数据进行对比检验。灰色神经网络模型拟合结果如表1所示。
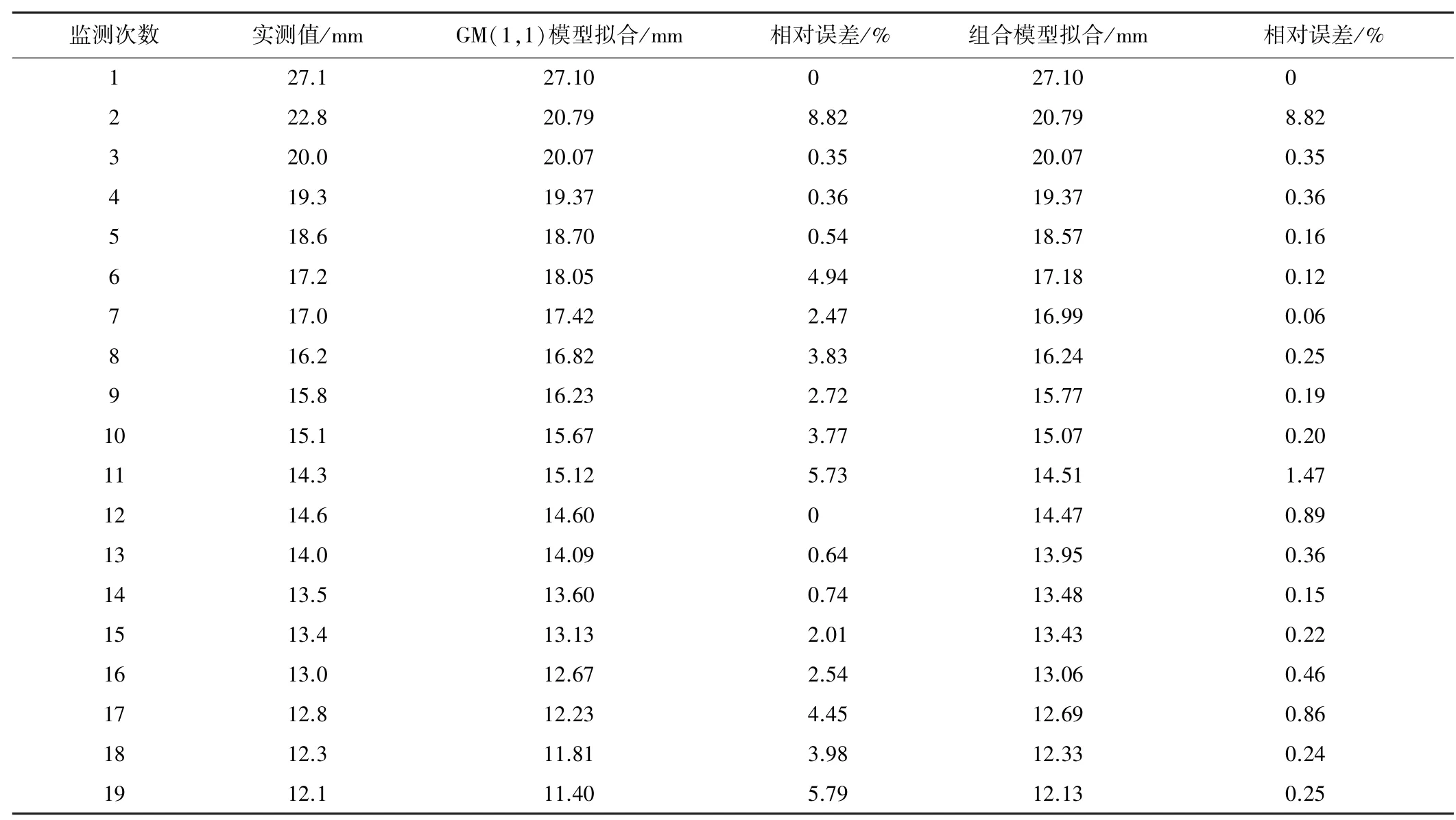
两种模型的拟合结果 表1
为了检验两种模型的预测精度,分别对GM(1,1)模型和灰色神经网络模型的预测结果进行比较,如表2所示。
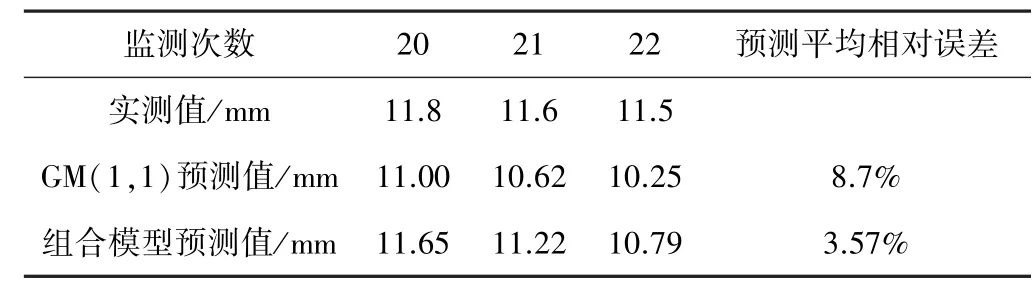
两种模型的预测结果对比 表2
在表2中,灰色GM(1,1)模型和灰色神经网络组合模型预测结果的平均相对误差分别为8.7%和3.57%,可以看出,灰色组合模型所获得的预测结果更加趋近于实测值,精度更高。图3列出了两种模型的拟合和预测情况,可以看出,灰色神经网络的预测精度明显高GM(1,1)模型的预测精度,尤其是数据序列存在上下波动的情况下。在实际的变形监测过程中,由于许多不确定因素的存在,大多数获得的数据序列是波动的,此时我们可以采用灰色神经网络模型进行预测,可有效提高精度,并获得较满意的结果。
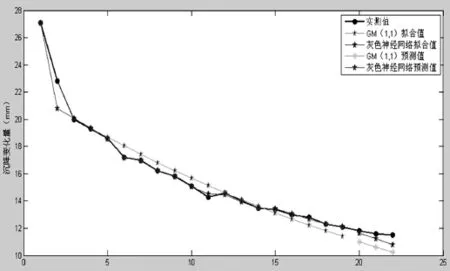
图3 两种模型的拟合值和预测值与实测值的比较
4 结 语
本文将灰色理论和神经网络模型相结合,建立灰色神经优化组合模型,充分发挥两者优势,能够在小样本,贫信息及数据有波动等情况下对变形监测数据做出比较准确的模拟和预测,并具有模型简单、无需确定非线性函数和计算方便等优点,从而为变形监测的数据处理提供一种有效的方法。但灰色理论和神经网络如何更好地结合以及神经网络隐含层的选择、网络参数的选择和网络结构的确定,还有待进一步的探讨。
参考文献
[1] 黄声享,尹晖,蒋征.变形监测数据处理[M].武汉:武汉大学出版社,2003.
[2] 张正禄,黄全义,文红雁等.工程的变形监测分析与预报[M].北京:测绘出版社,2007.
[3] 邓聚龙.灰色系统理论教程[M].武汉:华中理工大学出版社,1990.
[4] 刘思峰,党耀国,方志耕等.灰色系统理论及其应用[M].北京:科学出版社,2004.
[5] 陈祥光,裴旭东.人工神经网络技术及应用[M].北京:中国电力出版社,2003.
[6] 樊伟,杨军,刘廷廷.灰色神经网络组合模型及在滑坡预测中的应用[J].人民长江,2005,36(11):48~50.
[7] 吕宏辉,钟珞,夏红霞.灰色系统与神经网络融合技术探索[J].微机发展,2000,10(3):5~7.
[8] 飞思科技产品研发中心.神经网络理论与MATLAB实现[M].北京:电子工业出版社,2005.
[9] 吴飞宇.灰色系统和神经网络技术在深基坑变形监测中的应用研究[D].合肥:合肥工业大学,2011.
Abstract:This paper combin the advantages and disadvantages of grey model and neural network,and builds grey neural network.The observation data is processed and analyzed by thismodel.The result shows that grey neuralmodel can full play greymodel and neuralmodel of their advantages,and obtains highly precise forecast accuracy,which can meet the demand of application.
Key words:greymodel;grey neural network model;forecasting
The Application of High-Precision Instruments in the Excavation M onitoring——Order to Wuyuem iao Dam ing Lake Road Jinan Protection of Historic Nuildings Rxcavation M onitoring Project for Exam p le
Quan Jinyi,Zhang Xingguo,Wang Lei
(Jinan Geotechnical Investigation and Surveying Institute,Jinan 250013,China)
In this paper,order to Wuyuemiao Daming lake road Jinan protection of historic buildings excavationmonitoring project for example。Discuss the application of high-precision instruments(DINI12 electronic level,TS30 total station)in the excavation monitoring and problems encountered in the excavation monitoring approach on the issue,and excavation monitoring possible problems were discussed and proposed methods of prevention and treatment,combined with the actual production to explorecharacteristics of two high-precision instruments and the application of themonitoring process of their settlement in the pit,displacementmeasurementmethod.
excavation monitoring;precision;DINI12 electronic level;TS30 total station;settlement;displacement
Research on Predicting Deformation of Foundation Pit Based on Grey Neural Network M odel
Wu Feiyu
(Bengbu Design and Research Institute of Exploration and Surveying,Bengbu 233000,China)
1672-8262(2013)02-150-04
P258,TU196文献标识码:B
2-8262(2013)02-154-04中图分类号:TU433,P258
A
2012—05—18
全金谊(1982—),男,工程师,主要从事工程测量工作。
∗
2012—12—24
作者简介:吴飞宇(1987—),男,助理工程师,主要从事城市工程测量工作。
猜你喜欢
黄河之声(2022年10期)2022-09-27
成都信息工程大学学报(2022年2期)2022-06-14
中学生数理化(高中版.高二数学)(2022年4期)2022-05-25
中学生数理化(高中版.高二数学)(2022年4期)2022-05-25
中学生数理化(高中版.高二数学)(2022年4期)2022-05-25
中学生数理化·高二版(2022年4期)2022-05-09
中学生数理化·高二版(2022年4期)2022-05-09
中学生数理化·高二版(2022年4期)2022-05-09
小猕猴学习画刊(2022年4期)2022-05-05
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
