基于EPS 2008及地面三维激光扫描点云数据进行断面线提取
2013-03-03 09:36:37朱清海黄承亮李凯
城市勘测 2013年2期
朱清海,黄承亮,李凯
(重庆市勘测院,重庆 400020)
基于EPS 2008及地面三维激光扫描点云数据进行断面线提取
朱清海∗,黄承亮,李凯
(重庆市勘测院,重庆 400020)
基于EPS 2008软件平台进行二次开发,实现了对三维激光扫描点云数据进行断面数据提取,提出了基于三维激光扫描技术进行快速断面测量的作业流程、方法,并通过工程实例进行了验证,其验证结果表明采用三维激光扫描技术进行断面测量提高了工作效率,同时也很好地弥补了常规断面测量点位密度不足的问题,保证了断面测量精度,其方法可实施性强。
三维地面激光扫描;点云;数据处理;断面数据;EPS 2008
1 引 言
三维激光扫描技术可以分为星载、机载和地面激光扫描技术三种,本文主要基于地面三维激光扫描数据进行研究。地面三维激光扫描技术主要是利用激光测距原理来获取目标数据,激光扫描的点云数据包含三维坐标、颜色、反射率等信息。地面三维激光扫描仪的发展和应用,为人们获取丰富的局部地面空间信息提供了一种全新的技术手段,它是一种非接触式主动测量系统,可进行大面积高密度空间三维数据的采集,具有测量点位精度高、采集空间点的密度大、速度快等特点,且融合了激光反射强度和物体色彩等信息。地面三维激光扫描仪使测绘从传统的单点采集变为高密度、连续、自动获取,大大地增加了信息量,提高了工作效率,拓宽了测绘技术的领域。可以说地面三维激光影像扫描技术是继GPS空间定位技术后的又一项测绘技术革新[1],使测绘数据的研究内容、研究方法进入了新的发展阶段。
断面测量是各种工程测量的一个重要组成部分,无论是铁路、公路,还是桥梁、隧道的建设,都需要进行断面测量。目前应用较多的是全站仪断面测量和GPS RTK断面测量,它们都是单点接触测量,速度相对较慢,对于一些高精度、高密度、危险地段的断面测量显得无能为力。本文以Riegl VZ-1000三维激光扫描仪应用于公路断面测量为例,论述点云数据的获取、数据处理以及基于EPS 2008软件平台二次开发技术进行断面数据提取进行研究。
2 数据采集方案
2.1 控制点的布设
随机点云处理软件在点云拼接时基本上都具有根据扫描站对象的公共面片进行拼接、根据已知测站点和定向点坐标进行拼接以及根据扫描公共特征点进行拼接等功能。在控制测量时我们必须根据断面测量对象以及测量区域地形特征选择合适的控制布点方案。具体方案大致分为以下三种情况:
(1)在测量区域特征地物较多,拼接可以以特征地物进行拼接时,控制点主要以控制区域整体精度为前提,对于带状区域一般应布设在带状区域两端和中间,带状区域过长时中间适当加密。
(2)在测量区域特征地物较少,拼接只能以公共面片进行拼接时,带状区域控制点一般呈导线形式布设,方形区域控制点应呈中心辐射状布设。
(3)如扫描仪提供同轴RTK连接装置,也可以同步测量各测站点的控制坐标。
2.2 扫描分辨率的确定
扫描分辨率直接影响扫描数据的密度,同时影响扫描的时间和提取对象的精度,所以扫描分辨率设置时必须综合考虑以上因素。若进行精细模型的提取时,设置的分辨率必须能识别模型的最小曲率变化;若进行一般工程测量时则应以能控制地貌、地物特征变化为原则。通常情况下,我们采用距离控制,设定已知距离的采样间距,设置时需考虑目标测量区域至测站的最大距离和要求间距,在进行一般断面测量时,其扫描采样间距一般设置100 m处为5 cm。
2.3 作业流程
以基于三维激光扫描仪随机处理软件及EPS 2008平台进行断面测量、数据处理为例,进行流程分析,其作业按照以下流程进行:

图1 点云数据采集与处理流程
3 软件功能开发
以随机软件进行拼接、坐标转换、影像配准、去噪后的数据为基础,在EPS 2008软件平台中进行功能设计、代码编写实现断面数据的提取、编辑与输出。
3.1 需求分析与设计
在EPS 2008平台具备点云数据导入、获取的基础上,断面数据提取软件还应该具备根据线路中线、断面长度或者指定里程、断面长度进行特定断面线位置计算功能,提取指定位置点云数据功能,指定范围点云TIN建立功能,根据建立的TIN进行断面线位置数据提取功能以及断面数据输出功能。
根据以上需求设计软件功能界面如图2所示。
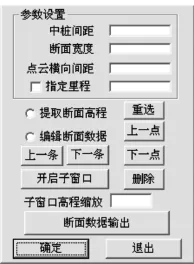
图2 断面数据提取功能界面
3.2 功能介绍及核心代码
在EPS 2008平台命令行输入模块名称,启动模块功能,选择线路中心线,右键单击进行指定里程或指定中桩间距及断面宽度的断面线位置计算,同时生成带里程的中线,其核心代码如下:
CGeObjList GeoList;//定义对象
GeoList.Copy(m_pSelection->GetGeoList());//获取选择集对象
CGeoBase∗pGeo=GeoList[i];
pGeo->GetPointList(POINT3DLIST pList);//获取地物点列
GotoPoints(pList,m_nLineType,POINT3DLIST temp-Points);//复合线型折线化
在获得线路中线折线化后的点列后即可根据点间距离计算特定里程位置以及断面线位置,然后根据断面线位置获取左右一定范围内的点云,建立TIN并提取断面线的高程。
SearchCloudPoints(rect,POINT3DLIST triPoints);//获得矩形范围内的点云
CreateTriNet(TriangleList,triPoints,2,1000,NULL,NULL,1,NULL,NULL);//建立TIN
int iTri=pTriNet->PtInNetTri(x,y);//返回三角形的索引
if(iTri>-1)
{
if(pTriNet->PtInTriangle(x,y,iTri))//点在三角形内
{
double dbSP_H=pTriNet->GetHeight(x,y,iTri);//用三角形平面内插出x,y处的高程
}
}
根据提取的断面线高程进行检查和编辑,对错误的位置进行编辑处理,选择提取的断面线,在子窗口中生成断面线的断面图,结合断面图进行数据编辑(直接使用快捷键,如:W抹点,E加点等)。
CreateNewSubViewDlg(m_pMap,rectSpace,m_pMap->Get-DataHandle(),strName);//创建子窗口
CMapCtrl∗pSubView=GetMapCtrlOfSubViewDlg(_T("子窗口控制"));//获取子窗口
CGLDC∗pSubGLDC=pSubView->GetGLDC();
CDC∗pSubDC=pSubGLDC->GetCDC();
pSubGLDC->PasteBackGround Image();
pSubGLDC->DrawMark(pSubDC,m_spCurrent,RGB(0,255,0),5,50,5);//在子窗口中画标记
//画线对象
UINT code=atoi("1");
m_pFea=m_pMap->GetFeature(code);
CGeoBase∗m_pGeoDraw2;
m_pGeoDraw2->SetPointList(ps);
m_pGeoDraw2->SetID(m_pMap->GetGeoID());
m_pMap->AddObject(m_pGeoDraw2);
最后选择带里程的中线,搜索编辑后的断面线输出断面数据,断面数据格式按照设计要求进行,每3行为1个断面体,第1行为里程、中桩高程,第2行为相对中桩点左侧的距离、高程,第3行为相对中桩点右侧的距离、高程。
4 工程实例
在重庆某立交道路定测工程中,作者采用RieglVZ-1000三维激光扫描仪进行道路中线全长约10 km的区域进行数据采集,内业采用随机软件RiSCAN PRO 1.64进行点云拼接、坐标转换、植被剔除后输出中间数据格式,然后采用以上开发的模块进行道路断面的提取、编辑、输出,共提取断面数据1 100条,断面全长约66 km,一个作业小组内外业分别用时1 d。由此可见,该项技术的采用大大提高了工作效率,同时也很好弥补了常规断面测量点位密度不足的问题,另外还减少了大部分的地形测量时间。大部分地形要素均可以从点云数据中提取,为三维激光扫描技术运用于工程测量奠定了良好的基础。

图4 断面数据提取与编辑

图3 断面数据提取前的数据准备
5 结 语
地面三维激光扫描技术能够快速地获取高密度、高精度的目标空间信息,在三维表面重建和测量方面具有显著的优势。结合生产实际进行更多的开发利用,对大面积工程测量、小区域特殊测量、危险区域测量等方面将会有出色的表现,但地面三维激光扫描技术也有其缺点,对于地面植被密集区域数据后期处理还有待研究。

图5 断面数据输出成果
[1] 刘旭春,丁延辉.三维激光扫描技术在古建筑保护中的应用[J].测绘工程,2006,15(1):48~49.
[2] 闫利,崔晨风,张毅.三维激光扫描技术应用于高精度断面线生成的研究[J].遥感信息,2007(4):54~56.
[3] 北京清华山维新技术开发有限公司.EPS2008地理信息工作站使用说明书[R].2010(8).
[4] 马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005.
[5] 董秀军.三维激光扫描技术获取高精度DTM的应用研究[J].工程地质学报,2007,15(3):428~432.
[6] 尹婷.三维激光扫描数据处理技术的研究[D].武汉:武汉理工大学,2010.
Extraction of Section Line Based on EPS2008,Terrestrial 3D Laser Scanning Point Cloud Data
Zhu Qinghai,Huang Chengliang,Li Kai
(Chongqing Survey Institute,Chongqing 400020,China)
This article is based the EPS 2008 software platform for secondary development,realization of the 3D laser scanning point cloud data section data extraction and proposed the Rapid cross-section measurements processes,methods based on 3D laser scanning technology.It’s a good guide for similar projects operating.And by an engineering example verified,the results shown that itused 3D laser scanning technology to section survey improving work efficiency,and making up for the conventional section survey point density deficiency,ensuring section survey accuracy,themethods implement the gender is strong.
3D laser scanning;Point cloud;Data processing;Section data;EPS 2008
1672-8262(2013)02-89-03
P234.4
A
2012—07—29
朱清海(1982—),男,工程师,主要从事工程测量,三维激光扫描方面的研究。
猜你喜欢
韩国语教学与研究(2022年3期)2022-02-08 06:04:52
昆明医科大学学报(2021年6期)2021-07-31 07:40:36
科学(2020年5期)2020-11-26 08:19:24
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:18
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
电力自动化设备(2015年4期)2015-09-28 02:43:02
现代营销·经营版(2015年3期)2015-04-20 06:46:58
发明与创新(2015年30期)2015-02-27 10:39:52
凿岩机械气动工具(2014年3期)2014-03-01 04:00:08
天津冶金(2014年4期)2014-02-28 16:52:32