机载LiDAR点云数据的后处理及应用
2013-03-03 09:36:38刘全海冉慧敏
城市勘测 2013年2期
刘全海,冉慧敏
(1.武汉大学测绘学院,湖北武汉 430079; 2.常州市测绘院,江苏常州 213002)
机载LiDAR点云数据的后处理及应用
刘全海1,2∗,冉慧敏2
(1.武汉大学测绘学院,湖北武汉 430079; 2.常州市测绘院,江苏常州 213002)
机载LiDAR作为一种高效的空间数据采集方法得到了有效的推广和应用,利用机载LiDAR可以提取多种数据,特别是在提取DEM具有很多优势,其成果数据在城市测绘工作中可以多方面应用,如建筑物高度提取,城市整体的DEM,等高线提取等。本文以常州为例,介绍了机载LiDAR的后处理、DEM提取以及在城市测绘中的应用范例。
:LiDAR;后处理;DEM
1 引 言
随着GPS和INS(Inertial Navigation System)组合定位精度的提高,利用LiDAR(Light Detection And Ranging)数据制作DTM和DEM已经成为现实,机载LiDAR由于其高效、精确、全天候等特点,近几年其应用发展十分迅猛[1]。
机载LiDAR技术通过应用机载激光雷达系统进行三维的空间测量,得到密集的地面物体的三维坐标点云数据。LiDAR系统采用主动方式获取数据,其激光脉冲受阴影和太阳角度的影响较小,且有穿透性,能够穿过云层和植物枝叶的缝隙,受气候影响小。因此与传统的摄影测量相比,LiDAR数据对天气、季节以及时段要求较小,并且可以快速地获取三维空间信息。
LiDAR系统获取的高程数据,其精度不受航高限制,因此能够结合数字航摄仪,并经过专用软件处理,可在空中完成地面的DEM、DTM、DSM以及数字正射影像图DOM的大规模生产,从而大大提高航测成图的作业生产效率,减少生产环节,缩短生产周期,并且在一定程度上提高成图精度。结合LiDAR数据和高分辨率影像,自动提取房屋及道路边线[2],成为快速数据采集和三维建模的方向。国内外很多学者在点云滤波算法及自动提取算法做了大量的研究,在机载数据的处理方面开发了很多工具。但在机载LiDAR点云数据的实际使用中,还有如高程异常批量改正、基准转换、专题信息分类提取、DEM数据再编辑等后处理问题以及机载LiDAR数据的高效、多元应用方面还需要深入探讨。
2 机载LiDAR数据的后处理
通过机载LiDAR获取点云数据,对LiDAR点云的处理和分类研究集中在点云的滤波分类,常用的滤波算法有数学形态学滤波、移动窗口滤波、迭代线性最小二乘滤波等[4]。许多学者在这方面做了大量的研究并取得了大量成果。这些研究侧重于LiDAR点云数据的分类与滤波提取方面,而且其分类和提取的主要生产工作集中在机载航空的处理部门或者研究单位,提供给测绘生产单位时一般经初步处理过的中间成果,因此测绘生产很少能涉及原始数据的处理。生产单位获得初步成果后,在实际应用时,还需要进行坐标基准转换、高程异常改正、标准DEM生成、分幅管理等后处理工作。
2.1 点云的基准转换
机载LiDAR点云定位采用GPS/INS系统,其成果为WGS84或CGCS2000下的大地坐标B、L及大地高H。因此,在实际应用时,需要进行基准间的转换,如CGCS2000到地方坐标系的转换。进行基准转换的算法很多,较为常用的有布尔沙-沃尔夫(Bursa-Wolf)模型(也称七参数转换)和莫洛金斯基(Molodensky)模型转换。考虑到点云数据量大的特点,基准转换采用两种办法,一是通过开发专用的坐标转换程序,批量地进行统一基准转换;二是采用成熟的转换软件(或工具)进行。常州市开发的专用坐标转换程序可以批量地、快速地处理海量点云数据。
2.2 点云的高程异常改正
机载LiDAR点云成果采用是大地高系统,大地高以参考椭球面为基准,而常用的正常高以大地水准面或似大地水准面为基准。因此需要进行大地水准面差距或高程异常改正。常见的方法有基于平面或曲面拟合、配置、三次样条等几何内插法、残差模型法、大地水准面模型法。点云数据面广量大,利用大地水准面模型实现高程异常改正是主要方法。EGM2008是最新公布的全球重力场模型,其高程异常精度在我国大陆的整体精度为±0.2m[8]。由李建成院士研制的我国最新陆地数字高程基准模型:重力似大地水准面CNGG2011平均精度为±0.13m,其中东部地区±0.07m,西部地区±0.14 m[9]。常州于2004年建立常州区域内的似大地水准面模型则达到±0.015 6m[10]。
常州通过利用似大地水准面模型成果实现对海量点云数据的高精度、高效和自动批处理,实现了机载LiDAR点云的高程异常改正。
2.3 点云分类的基本流程
机载LiDAR点云分类常用各类成熟的软件,国内有武汉大学测绘遥感信息工程国家重点实验室黄先锋博士团队开发的分类软件。以常州的数据为例,采用Leica AlS50机载扫描仪,数据处理软件为TerraSolid系列软件。TerraSolid系列软件是芬兰TerraSolid公司开发的一套专门处理激光点数据的软件,基于Microstation开发,能够较轻松地处理数百万的点数据,在其丰富的功能模块中,DEM的提取主要用到TerraMattch,TerraScan,TerraModeler,TerraPhoto这几个模块。其操作流程如图1所示。

图1 DEM提取步骤
整个操作流程中,点分类是非常重要的,只有在正确地分离出植物以及建筑点之后,才能将DEM准确地提取出来。其中根据高度来进行自动分类主要依赖于工作人员的工作经验及其对作业区域地形情况的熟悉程度,需要结合正射影像剔除特殊地带如水域、桥梁等地域的点云数据,提取成果如图2所示。
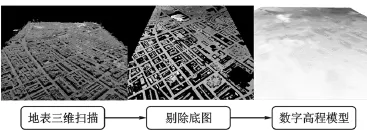
图2 DEM提取图
2.4 点云数据的规格化及标准DEM的分幅输出
经过TerraSolid生产出来的DEM是文本格式的数据,数据量小,但不能便利地应用于测绘工作。在一些城市中,会把DEM建立库进行管理应用[5],在城市测绘院中在此生产过程中,需要切实结合城市测绘所用数据的特点,建立DEM库,并转换为方便使用的数据格式,如IMG,GRID等可视化数据格式,也可以按图幅转换为可直接使用的CAD格式,以供地形图进行提取调用。
根据常州本地的应用特点,采用三类数据进行加工以及存储。
(1)原始分幅的点位的DWG文件存储,根据需求获取经过高程异常改正的原始数据进行分幅存储。
(2)将所有的数据加工成为整张的GRID格式,可提供大范围的高程数据,直观且便于管理应用。
(3)将整张GIRD格式的DEM数据分割成标准的格网的DEM,进行分幅管理,可为日后的航测等应用提供数据基础。
3 LiDAR点云数据在城市测绘中的应用
数据集是徕卡ALS50激光雷达系统所采集的Li-DAR成果数据,绝对地理位置位于江苏省常州市城区。系统数据采集基本参数信息如下:航高约800 m;航飞速度约70 km/h;最大扫描角度24°;最大回波记录次数4次;点阵密度约为4 pts/m2;平均点距约0.5m;点云平面误差小于1.0 m,高程误差小于0.5 m。
3.1 中小比例尺地形图高程的获取
LiDAR点云的数据源不同,其精度也不同。不同比例尺的图形数据对高程的精度要求也不同。如比例尺为1∶5 000,1∶10 000的图形数据,其高程数据可以从已处理好的DEM中提取,从而代替高程数据的外业采集工作。当然,该工作需要激光点云本身具有足够的精度,如点分类工作要做得足够好,特别是对农田以及山体上的矮小植被的剔除要做得足够精细。
3.2 三维渲晕图的制作
对于常规的城市测绘GIS数据基础,除了通常认为的矢量地图和影像地图等数据外,应还补充高程数据基础。其除了可以作为电子地图的底图,还可作为制图底图从而增强地图的立体感,使得数据更为便捷高效。以常州为例,制作山体效果图如图3所示。

图3 DEM山区成果
3.3 山区等高线的制作
对于一些较高山体,可以直接通过DEM生成等高线,其真实性以及便捷性是其他方法无法比拟的,特别是人难以到达的岛屿或者山区,此方式非常适用。
3.4 数字航测用正射影像数据的制作
可以将LiDAR提取的DEM成果数据导入数字航测过程中,特别是针对那些使用传统手段生产DEM的效果不是特别好的地区,如山区等,可以通过这种方式来减少等高线的修补工作量,提高正射影像的生产效率。另外,DEM作为遥感影像数字正射纠正过程中必不可少的基础数据,在进行遥感影像数字正射纠正时,采用LiDAR所提取的DEM数据,与利用在地形图上提取高程点所生成的DEM相比,能够显著提高正射纠正的效果。
3.5 机场净空调查应用
激光雷达数据非常具有实用价值,它能用于需要高程数据的项目。如在常州机场的净空调查项目中,可以将激光点位作为主要工作资料,地形图为辅助工作资料,进行数据的初步筛选,筛选出超出限度的高程点,然后初步认定其性质。从而在一定程度上减轻常州机场净空外业调查工作量,提高工作效率。筛选流程示意图及其效果如图4~图6所示。
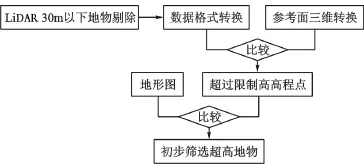
图4 超高地物初步筛选

图5 参考面制作

图6 初步筛选成果
3.6 城市三维建模的应用
地面三维激光扫描系统可以快速获取目标对象表面的三维信息,因而在数字城市、文物保护以及建筑物三维重建等领域已成为当前研究的热点[5]。但就大范围的城市建模而言,影像与LiDAR数据信息融合在三维城市建模中,有着更为广泛的应用。以常州数据制作为例,将三维的地形模的边线特征线通过DEM采集高程,则可得到精确的边线高程,从而为三维数字城市的地形制作保证了高度精度。同时可以获取到道路中心线高程,为准确的道路制作打好了数据基础。经过分类的建筑点位,成为建筑高程提取的可信的数据来源。
4 结 语
LiDAR点云数据的后处理是LiDAR点云数据使用时必须解决的工作。通过开发专用的坐标基准转换软件实现对海量点云数据的批处理,利用似大地水准面模型进行高程异常改正,点云数据的规格化及标准DEM的分幅输出极大地方便了用户使用。LiDAR点云数据在DEM提取、DOM制作、三维建模等方面有着广泛的应用前景。
[1] 张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007:2~3.
[2] 李怡静,胡翔云、张剑清等.影像与LiDAR数据信息融合复杂场景下的道路自动提取[J].测绘学报,2012(6):870~873.
[3] 闫利,张毅.基于法向量模糊聚类的道路面点数据滤波[J].武汉大学学报:信息科学版,2007,329120:1119~1122.
[4] 左志权,张祖勋,张剑清.知识引导下的城区LiDAR点云高精度三角网渐进滤波方法[J].测绘学报,2012,41 (2):246~251.
[5] 宋碧波,卢小平,卢遥.基于点云数据的建筑物三维重建[J].测绘通报,2010(S0):228~229.
[6] 卢小平,田继辉,张剑伟等.多尺度DEM数据的组织与管理方法研究[J].测绘通报,2010(6):12~15.
[7] 徐景中,万幼川,张圣望.基于机载激光雷达点云的断裂线自动提取方法[J].计算机应用,2008,28(5):1214~1216.
[8] 张兴福,刘成.综合EGM2008模型和SRTM/DTM2006.0剩余地形模型的GPS高程转换方法[J].测绘学报,2012,41(1):25~32.
[9] 李建成.最新中国陆地数字高程基准模型:重力似大地水准面CNGG2011[J].测绘学报,2012,41(5):651~660,669.
[10] 李建成,刘全海.常州似大地水准面确定技术研究报告[R].常州:常州市测绘院,2005:66~70.
宁波市测绘设计研究院加快推进测绘新技术应用
(本刊讯)近日,宁波市测绘设计研究院按照国家测绘地理信息局印发的《测绘地理信息发展“十二五”总体规划纲要》中关于“加快测绘科技创新,建设信息化测绘体系”的要求,启动“车载激光扫描与全景成像城市测量系统”和“静态三维激光扫描技术”应用系列培训,下发指导文件,扎实推进测绘信息化步伐。
2月下旬,该院下发《关于推进车载激光扫描与全景成像城市测量系统应用的若干意见》文件,要求在提高认识的基础上,按照“成熟一个应用一个”的思路推进新技术应用。现已理顺作业流程的规划竣工、城市部件采集和地下车位量测项目,要优先采用车载系统。同时研究建立公路测量、文物保护、数字工厂和土石方量算等项目的作业流程,以实际项目为依托,加快新技术推进。文件还就配合有序、确保生产,总结经验、及时反馈两个方面提出了具体要求。
宁波市测绘设计研究院上下联动启动系列培训,院总工办组织了“车载激光扫描与全景成像城市测量系统”技术讲座。由院一名博士和一名硕士主讲,内容有地面三维激光扫描技术发展概况、车载系统的硬件组成、工作原理、数据处理流程、经典应用案例等。119名专业技术骨干参加了学习。紧接着该院规划一所牵头组织了“基于静态三维激光扫描技术的建筑竣工测绘”技术讲座。两名技术骨干结合工作实例对点云数据的预处理(点云的合并及抽稀)、MPC软件的点云处理过程、点云成图,静态三维激光扫描系统的硬件组成、工作原理、外业操作流程以及RiscanPro软件的操作过程进行了讲解。
新技术培训主讲人理论联系实际,简单易懂。讲座结束后大家踊跃提问,主讲人详细回答。静态三维激光扫描系统讲座后还进行了现场MPC软件操作模拟练习,练习人边体验边提出自己的感想和建议,其他人紧张记录,整个培训内容充实,系统连贯,达到了较好的效果。
(宁波市测绘设计研究院 顾开建供稿)
《城乡规划工程地质勘察规范》正式实施
由北京市勘察设计研究院主编的国家行业标准《城乡规划工程地质勘察规范》(CJJ57-2012)经住建部2012年11月1日第1514号公告发布,于今年3月1日起实施。该规范的实施将进一步加强城乡规划工程地质勘察工作,为城乡规划选址和相关地质资料管理等提供重要的专业支撑。参编单位包括:广州市城市规划勘测设计研究院、武汉市勘测设计研究院、中国建筑西南勘察设计研究院有限公司、建设综合勘察研究设计院有限公司、天津市勘察院、北京市城市规划设计研究院。
(来源:http://www.bgi.com.cn)
Airborne LiDAR Data Post-Processing and App lication in Urban Surveying and M apping
Liu Quanhai1,2,Ran Huimin1
(1.School of Geodesy and Geomatics,Wuhan University,Wuhan 430079,China;2.Changzhou Mapping and Surveying Institute,Changzhou 213002,China)
The Airborne LIDAR as an effective spatial data acquisitionmethod has gotten effective promotion and application.The LIDAR data can be used to extracta variety of data.In particular,ithas a great advantage to extract DEM,and the results can be widely used in urbanmapping work.Such as building height extraction,the whole city DEM,contour extraction.Take ChangZhou City for example,this paper introduced the postprocessing of airborne LiDAR data、DEM extraction and the application in the city Surveying and Mapping.
LiDAR;DEM;PostProcessing
1672-8262(2013)02-92-04
P237,TP751
A
2013—01—09
刘全海(1972—),男,博士研究生,高级工程师,主要从事卫星大地测量及三维数字城市工作。
猜你喜欢
小读者之友(2022年4期)2022-05-20 13:19:36
当代陕西(2020年23期)2021-01-07 09:24:44
华人时刊(2019年19期)2020-01-06 03:23:08
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
水利与建筑工程学报(2015年6期)2015-12-21 07:45:46
全球定位系统(2015年4期)2015-02-28 12:38:13
浙江国土资源(2014年5期)2014-04-28 09:04:19
读者(乡土人文版)(2013年10期)2013-04-12 07:16:45
测绘科学与工程(2013年2期)2013-03-11 15:07:29
测绘科学与工程(2013年2期)2013-03-11 15:07:28