
三维激光扫描技术在地铁调线调坡测量中的应用
2013-03-03 09:36王文旭蔡敏王文江
城市勘测 2013年2期
王文旭,蔡敏,王文江
(天津市测绘院,天津 300381)
三维激光扫描技术在地铁调线调坡测量中的应用
王文旭∗,蔡敏,王文江
(天津市测绘院,天津 300381)
主要对三维激光扫描技术应用于地铁调线调坡的关键技术进行了研究,探讨了基于此技术的点云数据获取的流程和断面数据提取的方法,以天津地铁三号线的一段区间调线调坡测量为例,同时使用三维激光扫描技术和传统技术进行调线调坡测量,并对实测数据进行了对比;结果表明,三维激光扫描技术应用于地铁调线调坡测量方法具有作业效率高、可靠性大、实用性强等特点,可以应用于地铁调线调坡测量。
三维激光扫描;调线调坡;点云
1 引 言
三维激光扫描技术是一门新兴的测绘技术,能快速获得原始的测绘数据,并完整高精度地重建实体[1]。具有非接触、精度高、速度快等特点,能大幅节约时间与成本,有效解决数字化信息采集的难题。这些优势使其在虚拟现实、数字城市、三维传真、文物保护、工业生产等领域有广泛的应用,是目前国内外测绘领域研究关注的热点之一[2,3]。
调线调坡是地铁设计施工过程中的一项非常重要的工作,是对地铁施工中特别是隧道盾构后所产生的线路偏移等误差进行线路平、纵断面的调整,以消除误差达到合理的设计要求,满足各种设备和车辆运行的限界要求。在对地铁进行调线调坡测量时,采用常规测量方法获取地铁站点和隧道内的断面数据效率不高,且测量数据不可重复利用。鉴于此,本文讨论了采用三维激光扫描技术来进行地铁调线调坡的测量工作,替代常规测量方法的关键技术,并进行了一段隧道的扫描工作,取得了满意的结果。
2 三维激光扫描技术原理
三维激光扫描仪通过发射和接收的激光束测量物体,并利用激光束中心点来定位,计算出每个点的三维坐标。大量的点形成三维点云,并带有强度信息和目标物体的反射率信息。通过三维激光扫描直接将各种大型的、复杂的、不规则、标准或非标准等实体或实景的三维数据完整地采集到电脑中,经过建模,构建出目标的三维实体模型。三维激光扫描点坐标计算原理如图1所示。

图1 扫描点坐标计算原理
目标点P的坐标可采用式(1)进行计算:

其中S为目标点P与扫描仪距离,精密时钟控制编码器同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值β。
3 三维激光扫描地铁调线调坡测量流程
三维激光扫描的数据采集及处理主要可以分为数据采集、点云数据处理、模型数据后处理三个阶段[4]。
数据采集的流程如图2所示,控制测量可以利用经检测合格的施工平面高程控制点作为扫描用控制点,在控制点较少的地方应进行加密控制测量。点云数据处理要经过数据预处理和多视点云数据配准两步。数据预处理主要是对原始数据需要进行格式转换和减少点云表面噪声并且缩减数据量。多视点云配准是将两个或两个以上基于扫描仪坐标系中的三维点云数据进行转换、统一到相同坐标系下的过程(如图3所示)。在完成点云数据的配准后检查点云,如发现点云中存在由于扫描死角而产生的漏扫,则需进行外业补充扫描。三维模型建立及编辑基于点云数据之上,目前主要依靠人工交互式建模,自动化程度不高。
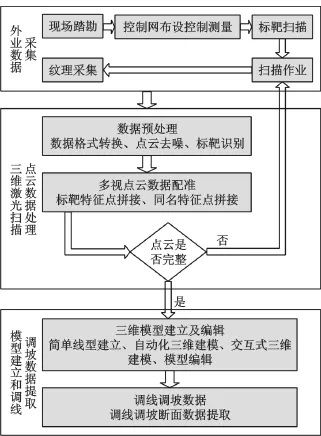
图2 激光扫描点云数据采集与处理流程图
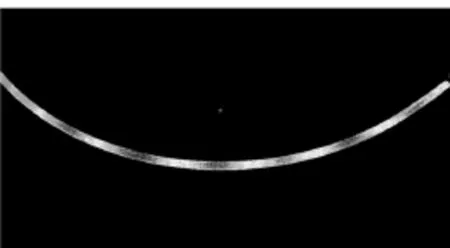
图3 某地铁隧道多视点云数据配准至同一坐标系
在获得了目标的全部点云数据后,对点云滤波、拼接和配准,完毕后根据点云建模(如图4所示),地铁调线调坡所要求的相关断面数据则可在模型上或者直接利用点云提取。
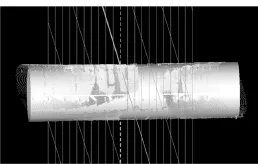
图4 根据点云数据进行三维模型建立与编辑
地铁隧道施工由于施工误差的原因,造成施工结果与设计不符,如果按照原设计平、纵断面可能满足不了建筑限界要求,这就需要做调线调坡工作。调线调坡测量包括线路中线的放样及结构底、顶板的高程测量以及横断面测量。在此之前,还必须进行地下精密导线、水准测量,以建立控制网,并在此基础上进行中线放样、水准测量和横断面测量。
横断面一般根据设备和车辆运行的要求选择一些测点,这些测点应是设备安装的最不利位置。以天津地铁圆形隧道为例:选择底,顶,距底板面1.0 m、2.5 m、4.5 m处为测点。通过这些点可以将隧道轮廓勾绘出。隧道断面如图5所示,图中Hd、Ht为底板和顶板高程,A1、A2、A3为线路中心至隧道左侧横距,B1、B2、B3为线路中心至隧道右侧横距。

图5 隧道横截面测量点位
横断面测量间距应根据隧道形状、线路是直线还是曲线等因素决定。在实际工作中每12 m测量1个横断面,也可以根据现场实际情况和设计方的要求进行加密或放宽。当测量所提供的断面数据密度不够时,就需要进行断面加密测量,如果采用传统的测量方式,则需要再次进行外业测绘工作,这样增加了很多的额外工作量和人员成本,但是采用三维激光扫描测量技术则可以避免这一类的问题。三维激光扫描技术可以一次性获得目标表面的高密度数据,因此在进行断面加密时可不需要再次额外进行外业测量工作,所需断面数据可以从点云和模型中提取,可以避免多余的工作量投入。
4 实验结果与分析
为判断利用三维激光扫描仪进行地铁调线调坡测量的精度和可靠性,我们选取了天津地铁三号线的一段隧道进行对比测量实验,该段试验段全长约420m,采用全站仪加水准测量与三维激光扫描仪扫描同步进行的测量方式,共测量23个断面,获取167组对比数据。

点云配准(拼接)误差 表1
扫描点云数据经过配准后,其控制靶标和拼接靶标的配准精度如表1所示,参考《城市轨道交通工程测量规范》GB50308-2008中对精密导线测量的主要技术要求:相邻点的相对点位中误差限差为σ=±8 mm,则靶标的拼接和配准误差均在2σ以内。
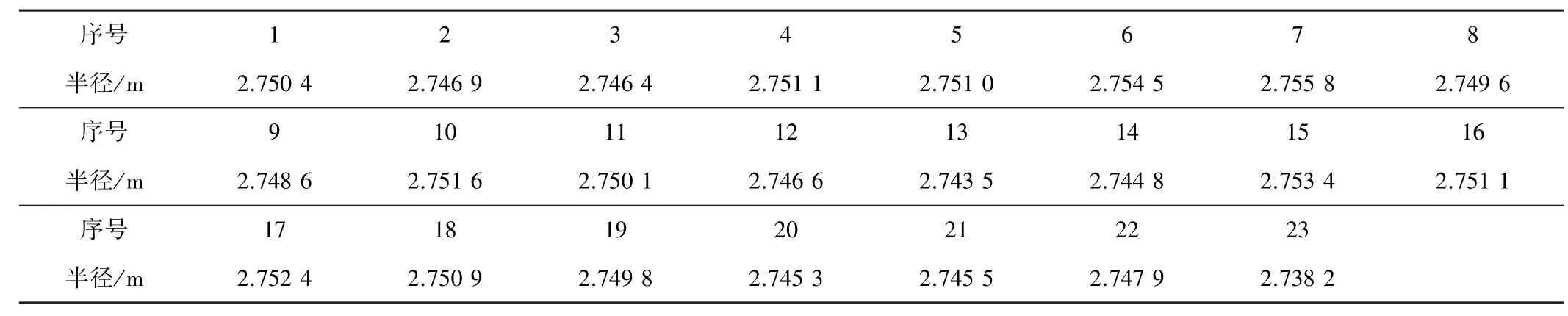
隧道模型半径 表2
利用断面中线桩两侧各一定范围扫描的点云进行隧道建模后,得到的隧道半径如表2所示,隧道管片制造的内半径为2.75 m,从表中可看出绝大多数模型的半径与设计差值都在毫米级,只有23号断面因为处于隧道的出洞处,所以模型半径差达到了1.2 cm。这说明点云的内符合精度很高,能够达到调线调坡测量的技术要求。

图6 两种测量结果较差分布统计直方图
对全站仪测量结果与扫描测量结果的差值进行统计分析得出,线路中线到边墙距离的差值均值为-4.9 mm,隧道底部和顶部的差值均值为2.2 mm,综合两项均值为-3.1 mm。根据《城市轨道交通工程测量规范》GB50308-2008中对结构断面测量的主要技术要求:断面点与线路中线法距测量中误差限差和地板高程测量中误差限差为σ=±10 mm,以2σ为差值限差,则样本可信度为88.6%。综上所述,经过初步的验证,认为三维激光扫描技术和方法用于地铁的调线调坡测量是可行的。
5 结 论
综上所述,通过将激光扫描技术在天津地铁三号线的一段区间的调线调坡测量的对比实验,说明此项技术应用于地铁调线调坡测量具有作业效率高、可靠性高、实用性强,可以用于地铁的调线调坡测量。但是在以后的生产中还有一些其他方面的技术有待开发和提高,如断面数据自动提取的算法和程序的实现,点云自动配准的算法和程序实现等。
[1] 李清泉,杨必胜,史文中等.三维空间数据的实时获取、建模与可视化[M].武汉:武汉大学出版社,2003,236~237
[2] 张祖勋,张剑清.城市建模的途径与关键技术[J].世界科技研究与发展,2003,03:23~29.
[3] 王继周,李成名,林宗坚.城市三维数据获取技术发展探讨[J].测绘科学,2004,29(4):71~74.
[4] 蔡润彬.地面激光扫描数据后处理若干关键技术研究[D].上海:同济大学,2008,13~26.
[5] 刘春,张蕴灵,吴杭彬.地面三维激光扫描仪的检校与精度评估[J].测绘通报,2009,11:1~9.
[6] 宋宏.地面三维激光扫描测量技术及其应用分析[J].测绘技术装备,2008,10(2):40~43.
[7] 杨伟,刘春,刘大杰.激光扫描数据三维坐标转换的精度分析[J].工程勘察,2004,3:61~63
[8] 郑德华,沈云中,刘春等.三维激光扫描仪及其测量误差影响因素分析[J].测绘工程,2005,14(2):32~35
The Application of 3D Laser Scanning Technology in Subway Route Ad justment of Alignment and Gradient M easurement
Wang Wenxu,CaiMin,Wang Wenjiang
(Tianjin Institute of Surveying and Mapping,Tianjin 300381,China)
The papermainly studied on the key technology of3D laser scanning technology applied in subway adjustment of route alignment and gradient,investigated the acquisition process of point cloud data and extraction method for cross-section data based on this technology,for the sample of route adjustment of alignment and gradientmeasurement in a range of Tianjin subway line 3,used both 3D laser scanning technology and traditional techniques,and compared the measured data;The results showed that themethod using 3D laser scanning technology applied in subway route adjustment of alignmentand gradientmeasurement iswith characteristics of high efficiency,reliability,practicality and it can be used in subway route adjustment of alignment and gradientmeasurement.
3D laser scanning;Adjustment of route alignment and gradient;Point cloud
1672-8262(2013)02-96-04
P234.4
B
2012—07—11
王文旭(1975—),男,高级工程师,主要从事精密工程测量和测绘技术管理工作。
猜你喜欢
韩国语教学与研究(2022年3期)2022-02-08
昆明医科大学学报(2021年6期)2021-07-31
锻压装备与制造技术(2021年2期)2021-07-19
科学(2020年5期)2020-11-26
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
小哥白尼(趣味科学)(2019年2期)2019-04-17
中国公共安全(2017年7期)2017-10-13
电子制作(2017年9期)2017-04-17
电力自动化设备(2015年4期)2015-09-28
