
测深仪固定误差和比例误差的检测方法
2013-03-03 09:36王智明吴春节陈允约
城市勘测 2013年2期
王智明,吴春节,陈允约
(1.宁波市测绘设计研究院,浙江宁波 315042; 2.山东科技大学测绘科学与工程学院,山东青岛 266590)
测深仪固定误差和比例误差的检测方法
王智明1∗,吴春节1,陈允约2
(1.宁波市测绘设计研究院,浙江宁波 315042; 2.山东科技大学测绘科学与工程学院,山东青岛 266590)
从测深仪的工作原理出发,根据声波在海水介质中的传播特性,设计了一种单波束测深仪固定误差和比例误差检测的方法和检测流程。考虑到声速对比例误差检测的影响,本文还讨论了将声速误差参与平差计算的检测模型公式并对其可行性进行了讨论。
比例误差;声速误差;测深仪检测
1 引 言
随着国家对近海海洋空间资源等的规划、开发和利用步伐的加快,国内对海洋测量技术的精度要求也越来越高。海洋地理信息数据的精度和地域范围也不再仅限于能够满足海洋渔业、养殖业以及船舶航行安全等方面。我国各沿海城市的测绘及地理信息部门都已经引进了测深设备并投入使用,为了保证海洋测绘数据精度和可信度符合国家和地方的关于海洋水深测量的规定,必须定期对测深设备进行稳定性测试和误差检测。固定误差和比例误差是衡量测距仪器的重要指标。测深仪的工作原理事实上就是换能器与水底之间距离的测量。所以,同样需要检测仪器的固定误差和比例误差。不管是距离的测量还是水深的测量,其测量误差都可以分为两个方面:一部分是与测量的距离D成比例的误差,称为比例误差;另一部分是与距离无关的加常数误差,称为固定误差,故一般将测距的精度表达式简写成式(1)的形式:

式中a为固定误差,以mm为单位,b为比例误差系数,以mm/km为单位;D为测量的距离,以km为单位,对于测深仪的比例误差一般为水深的千分之几。固定误差通常具有一定的数值,与测量的距离无关。测量距离较大时比例误差占据主要地位,距离较短时固定误差占据主导地位。每一个测距仪器的固定误差和比例误差是一定的,可以通过检测仪器的固定误差和比例误差来对所测得的距离加以改正,提高测量精度。对于测深仪而言,测量介质的声音传播速度是一个很重要的物理量,对于比例误差有很大的影响。所以,研究一种检测测深仪精度的方法并推广利用,可以从整体上提高我国海洋测绘水深数据的精度。
2 检测原理与方法步骤
单波束测深仪的测量原理是通过测定声波在换能器和海底之间往返一次的传播时间t,利用声波在水中的传播速度v来计算水体的深度[1]。

式中D为测量的深度,v为声速,t为声波往返一次的时间。由于声波在水中的传播速度是一个不确定的物理量,所以在进行测试时必须对水体的声速进行测量。考虑到声速测量值的影响,必须对声速的测量误差进行分离,分析如下:
声速v是一个非常重要的物理参数,它的精确求得是获得准确水深值的关键。许多学者的研究发现声速值是海洋水体温度T、盐度S和深度D的函数,并给出了具体的函数表达式,其中适用于我国海域的简化Wilson公式为:

通过式(3)可以看出,对海水声速影响最大的因素是水体的温度,温度相差1℃声速差距在4.6 m/s左右,其次的影响因素是盐度,影响最小的是水深。通过对实验室水池长期的声速测量统计发现水池的表层声速较稳定,在早上7:00~9:00时间段内声速变化在10 cm/s之内。综合分析各方面的因素,选择将测深仪水平放置测量换能器与水池墙壁之间的距离与全站仪测量的距离进行比较,计算两个距离的差值来评定测深仪的测量精度的方法。
测深仪测量值相对水深真值的误差△的表达式为:

其中a为固定误差,b为比例误差,h为测量的水深值。
在测量前和测量后用声速仪分别对水池的表层声速进行测量,测量得到声速为1 482.25 m/s。测试时将测深仪的声速设置为1 482 m/s,δ为声速误差,则声速的真值v的表达式为:

测量的水深值h的表达式为:

式中t为测深仪测量的用于计算水深的时间间隔的一半。
全站仪测量距离的精度要远高于测深仪测量的距离,所以把全站仪测量的平距作为真值。

将式(6)带入式(7)得到:


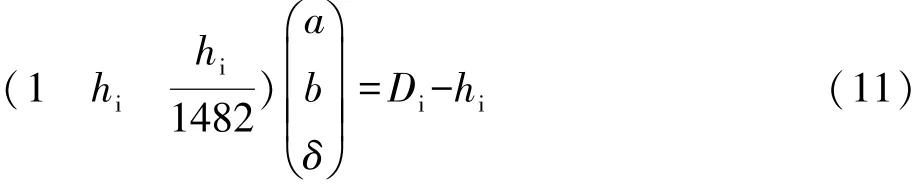
根据多次测量得到的有多余观测的D和h的值,建立线性方程组:

整理得到:
其中有3个未知数a,b和δ,必要观测数为3,为了提高误差检测精度,观测数需要大于3。用间接平差的方法计算固定误差a,比例误差b和声速误差δ的值。声速只能输入整数的测深仪,由于按照水深所计算出的声速误差δ是按照整数来计算的,实际的声速误差要以声速仪测量得到的声速测量值来计算。
3 实际数据测试
运用以上的原理方法,在实验室水池对中海达生产的HD-310型号的单波束测深仪和加拿大AML公司生产的SV Plus V2型号的声速剖面仪进行了固定误差和比例误差的检测实验,本实验采用2 mm+ 2 ppm的尼康DTM-452C全站仪测量距离与单波束测深仪横向安置测量距离进行比对,全站仪的测量精度远高于测深仪的测量精度,可以认为全站仪测量的距离为真值用来计算测深仪的固定误差和比例误差。检测原理示意图如1所示。

图1 固定误差和比例误差检测示意图
3.1 声速测量
虽然实验持续的时间不会太长,但是在测量前和测量后都要对水池的表层水(1 m以内水深)的声速进行测量,特别注意在声速测量时不要搅动水体,如果水池的底层低温水流动到表层将会严重影响声速,数据也是很不准确的,所以不可以用于检测计算的源数据。测量开始前和结束后,测量得到的声速为1 482.25 m/s和1 482.35 m/s,声速变化不大,声速取值1 482 m/s输入测深仪。
3.2 仪器安置
根据图1所示,安置好测深仪和全站仪,并测量全站仪与测深仪探头底面与全站仪距离起算点之间的偏移量以及水池墙壁与棱镜之间的偏移量。为确保测深仪的测量值所测得的距离即是换能器与墙壁的垂直距离,测深仪探头的安装注意要使发射的波束必须与墙壁垂直或者偏离角度小于换能器波束角的1/2,具体操作的步骤是:打开测深仪软件并开始测量,等仪器稳定后上下和左右调节换能器探头,同时读取测深仪测量得到的水深值,水深值读数的最小值的范围即是满足波束垂直墙壁偏离在1/2波束角的范围。
3.3 数据采集
改变测深仪换能器与墙壁之间的距离,采集的数据如表1所示。
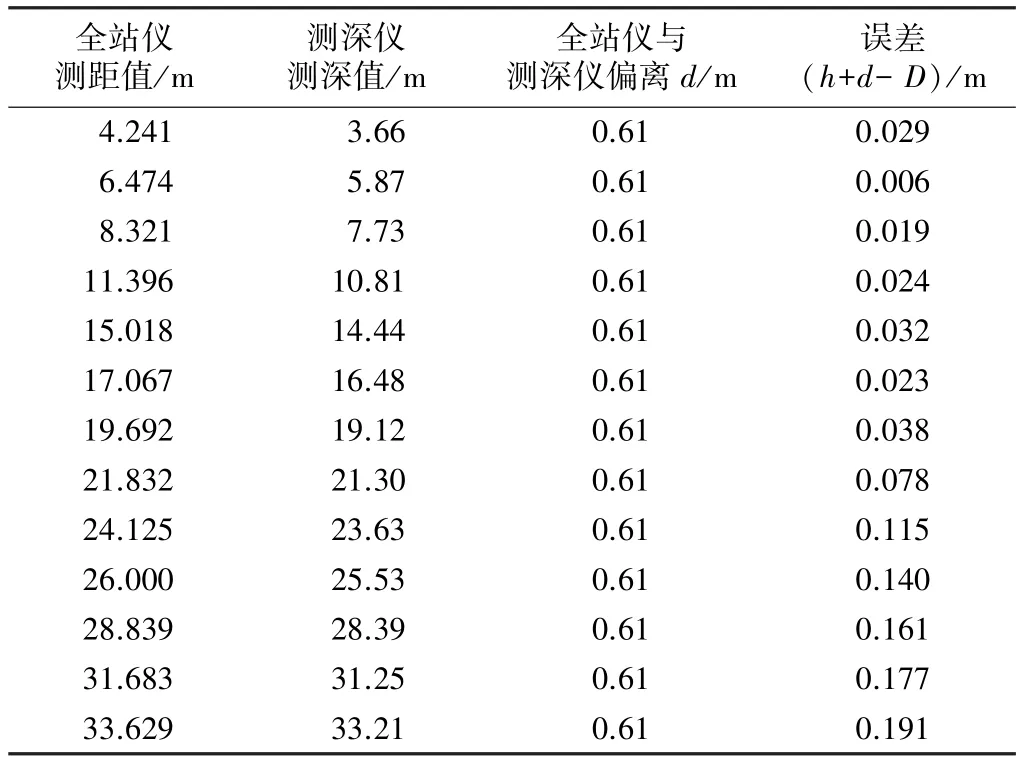
单波束测深仪误差校正 表1
根据表1拟合从18 m~34 m之间的误差和水深测量值之间的关系图,如图2所示。
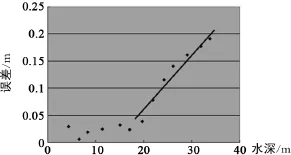
图2 水深—误差关系示意图
3.4 数据分析
由图表中可以看出,13组数据不服从整体的分布规律,测量的距离在20 m之内时,误差基本保持在3 cm之内,当距离大于20 m时两者关系基本为线性关系。所以,需要分两种情况分析。第一种:当测量的深度小于20 m时,测量中误差为2 cm,在对测量到的数据进行后处理时加常数(-2 cm)即可,比例误差可以认为是0。第二种情况:当测量的深度大于20 m时的7组数据进行线性最小二乘估计,将这8组数据代入式(10)列出线性方程:
当h小于20时:H=h-0.02(12)
当h大于20时:H=h-(-0.1403+0.01×h)(13)
经过校准之后的水深数据精度明显提高,小于20 m水深的中误差可以提高到1 cm,大于20 m的水深数据精度的提高更加明显。经过误差校准公式线性拟合后的测深数据中误差小于3 cm。
4 结 语
通过实际测试和计算可以看出,用全站仪测距来检测测深仪测距的固定误差和比例误差是可行的,固定误差和比例误差不仅可以用来检测仪器的精度,还可以对仪器进行校准,对仪器测量的数据进行参数校正,提高数据精度。同时,以上的算法也有不足,声速的测量是通过声速仪来测量的,而声速仪测量也是存在误差的,本实验采用的检测方法没有实现在检测测深仪固定误差和比例误差的同时计算出声速仪的测量误差,这一问题有待进一步研究。
[1] 张海涛,唐秋华,周兴华等.多波束测深系统换能器的安装校准分析[J].海洋通报,2009,28(1):102~107.
[2] 刘雁春.海洋测深空间结构及其数据处理[M].北京:测绘出版社,2002.
[3] 阳凡林,刘经南,赵建虎.多波束测深数据的异常检测和滤波[J].武汉大学学报(信息科学版),2004,29(1):80~83.
[4] 阳凡林,李家彪,吴自银等.多波束测深瞬时姿态误差的改正方法[J].测绘学报,2009,38(5):450~456.
[5] 吴英姿,徐新盛,乔力争.多波束测深系统的精度评估方法研究[J].海洋技术,2003,22(3):65~69.
[6] 赵建虎,刘经南,阳凡林.多波束测深数据系统误差的削弱方法研究[J].武汉大学学报(信息科学版),2004,29 (5):394~397.
[7] 韩李涛,阳凡林,孔巧丽等.多波束测深系统校正参数求解方案及可视化实现[J].测绘科学,2011,36(4):108~110.
[8] 阳凡林,卢秀山,李家彪等.多波束勘测运动传感器偏移的改正方法[J].武汉大学学报(信息科学版),2010,35 (7):816~820.
[9] Kongsberg Simrad Company.Kongsberg Simrad EM 950 Multibeam Echo Sounder Operator Manual[R].Kongsberg Simrad Company,2010.
The Constant Error and Scale Error Detection M ethod of Echosounders
Wang Zhiming1,Wu Chunjie1,Chen Yunyue2
(1.Ningbo Institute of Surveying and Mapping,Ningbo 315042,China;
2.Geomatics College,Shandong University of Science and Technology,Qingdao 266590,China)
This paper designed a constant error testmethod and scale error testmethod of the single beam echosounder,based on the sound wave spread feature in seawater and run principle of echosounder.Taking sound velocity affecting the scale error detection into consideration,discussed themethod,which the sound velocity error calculations adjustment included.
Scale error;Sound velocity error;Echosounder test
1672-8262(2013)02-126-03
P229;P204
A
2012—09—18
王智明(1985—),男,助理工程师,主要从事海洋测绘及测深数据处理方面的研究。
猜你喜欢
河北水利(2022年10期)2022-12-29
海洋通报(2022年4期)2022-10-10
海洋信息技术与应用(2022年1期)2022-06-05
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
工程与建设(2019年3期)2019-10-10
城市道桥与防洪(2019年5期)2019-06-26
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
电测与仪表(2016年9期)2016-04-12
浙江国土资源(2015年4期)2015-05-09
