临近空间卫星通信天线伺服跟踪的研究
2013-01-18 08:06张德
无线电通信技术 2013年2期
张 德
(中国电子科技集团公司第五十四研究所,河北石家庄050081)
0 引言
临近空间指距海平面20~100 km的空域[1],部署在临近空间的飞行器(气球、气艇、升浮体和可操纵浮空器等)信息系统与空基或地基信息系统相比具有滞空时间长,信息收集持续时间长,距离地面较近可以获得更高分辨率、更为真实准确的信息等独特优势,有效填补航空装备和天基装备之间的空白。在高效、可靠的卫星通信手段的保障下,可形成“空天一体”的信息交互系统。卫星通信是支持全球的主要超视距通信手段,临近空间任务的特点决定了其必须具备利用卫星进行通信的能力[2]。基于临近空间的特殊使用环境,对临近空间飞行器卫星通信伺服跟踪方案进行了分析,以期为临近空间卫星通信应用提供参考。
1 临近空间卫星通信天线关键技术
临近空间飞行器的卫星天线波束受飞行器航向、姿态变化扰动而偏离卫星,必须采取波束稳定措施予以隔离[3];同时,飞行器的平移运动、上下运动都将造成天线波束对卫星的指向偏离,因此,对于长期滞空并连续工作的临近空间卫星通信系统,如何实现天线波束的稳定跟踪成为临近空间卫星通信天线的关键技术。
2 跟踪方案分析和确定
2.1 典型天线跟踪方案分析
典型的天线跟踪方案主要有引导跟踪、步进跟踪以及单脉冲跟踪等,其特点及适应性分析具体如下。
2.1.1 惯导引导跟踪
其原理是根据飞行器上安装的定位、导航设备(惯导)提供的信息(地理经度、纬度、载体航向角、横摇角和纵摇角)和卫星的经度,实时计算出天线指向卫星的方位、俯仰地理角度,经过坐标变换,控制天线对准卫星。
惯导引导跟踪是开环工作方式,对星精度主要取决于惯导的精度。要达到天线对星的精度要求,在每次系统加电时(或系统断电重新加电时)必须对惯导进行航向角标校,且这个标校过程通常在静态条件下完成。另外,惯导的航向存在漂移误差,而且随时间积累而增大(这是惯导所固有的),为了减小这个误差,就需要实时或定时校正航向。对于长期滞留于临近空间的飞行器来说,滞留时间可达几个月,由于飞行器一直处于运动状态,惯导不具备自动标校功能时,随着工作时间的延长,惯导漂移误差逐渐积累增大,使天线对星精度逐渐降低并最终失去目标。要在运动状态下完成惯导标校,需借助第三方导航数据才能完成,目前最常用的是借助双GPS导航数据消除惯导航向漂移误差,该方案完全依赖于GPS数据,一旦GPS数据不能获取或数据不正确时,GPS导航数据将出现偏差,使惯导航向数据出现偏差,造成天线无法准确对准卫星。故该方案不太适于在临近空间长期滞留的飞行器卫星通信天线。
2.1.2 陀螺稳定步进跟踪
该方案就是在天线座架上的适当位置安置2只惯性元件-陀螺,分别用来敏感车体姿态变化对天线波束在方位方向和俯仰方向产生的扰动,其输出反馈至相应的伺服环路,构成负反馈稳定环路,控制天线向着扰动相反的方向运动。
陀螺负反馈稳定系统是一种自身稳定系统,陀螺作为反馈敏感元件,在惯性空间也会产生零点漂移,造成伺服环路漂移,从而使天线指向偏离目标,因此,有必要引入对卫星的自跟踪措施,克服陀螺漂移,同时对飞行器位置变化引起的指向角变化进行自动调整。
步进跟踪是地球站卫通天线常用的跟踪技术,它是利用卫星信号强度随天线指向误差增大而减小的特征,控制天线方位、俯仰轴交替步进、采样比较、判断方向,不断搜索信号使天线保持在正确的方向上(即信号最强处)。这种方法使用的设备少、成本低,但如果用于飞行器卫星天线,由于其实时性差,陀螺稳定剩余误差影响信号采样准确性,容易造成方向判端错误而丢失信号,因而不满足临近空间飞行器卫星通信天线应用。
2.1.3 陀螺稳定单脉冲跟踪
该方案是在陀螺稳定基础上引入单脉冲跟踪来克服陀螺漂移,同时对飞行器位置变化引起的指向角变化进行自动调整。
单脉冲自跟踪是一种高精度的零值自动跟踪体制,它是利用差模电磁场的天线方向图以轴向为零值,偏轴有极性的特点来实现自动跟踪的。单脉冲自跟踪技术通常使用在跟踪高速移动目标(低轨卫星、飞机等)、移动卫星通信地球站以及要求跟踪精度高的测控系统中。作为单脉冲跟踪的重要技术指标,交叉耦合直接影响到天线的跟踪精度[4-6]。然而,由于天线电轴飘移、环境温度变化或天线极化跟踪等多种因素的影响而引起的和差通道相对相移,使得交叉耦合指标不断恶化,为保证地球站天线始终保持高的跟踪精度,就需要经常对和差通道的相对相位进行标校(即校相)。若跟踪接收系统不具备自动校相功能或校相不理想时,将造成通信故障或性能劣化,故该方案也不太适于在临近空间长期滞留的飞行器卫星通信天线。
2.2 跟踪方案确定
综上所述,对于在临近空间长期滞留的飞行器卫星通信天线,步进跟踪方案实时性差、受姿态扰动影响容易丢失目标;惯导引导跟踪方案因属于开环跟踪,跟踪性能较差,同时又依赖于具有航向自动校正功能的惯导系统,其漂移误差的积累会使天线丢失目标;单脉冲自跟踪方案要求接收机须具备校相功能,若不能在载体运动状态下进行校相,和差通道的相对相移使得交叉耦合指标不断恶化,不能保证天线的跟踪精度。因此,有必要采用新的跟踪方法来解决上述矛盾,相控波束倾斜跟踪能够很好的解决上述跟踪方案的不足,满足临近空间飞行器卫星通信天线的跟踪要求。
3 相控波束倾斜跟踪
图1是采用四喇叭阵列馈源构成的相控电子波束倾斜跟踪天线馈电及跟踪实现原理框图。

图1 阵列馈源的馈电及跟踪原理框图
馈源由4个正方形喇叭构成(4个喇叭分别称为S1、S2、S3和S4)。馈源的发射和接收采用正交馈电的方式,分别耦合正方形波导腔体内的2个极化信号。发射使用探针馈电,采用带状线馈电网络进行直接合成,耦合给馈电波导,通过波导传输网络连接发射功放。
馈源的接收信号由正方形波导侧壁耦合,通过波导连接阻发滤波器,进入一体化设计射频前端组件:4路射频经低噪声放大器放大后,进行功率分配,4路合成后进行射频输出。另4路经信号切换矩阵,输出给天线跟踪接收模块。通过脉冲信号控制微波开关可以使主波束在4个方向倾斜,如图2所示。

图2 相控波束扫描示意图
馈源通过后端微波组件把天线接收到的信号分成了和支路和差支路,分别送给通信接收机和跟踪接收机如图3所示。跟踪接收机通过2路正交的脉冲信号(方位基准、俯仰基准)控制微波开关依次导通来实现天线波束的倾斜和扫描。
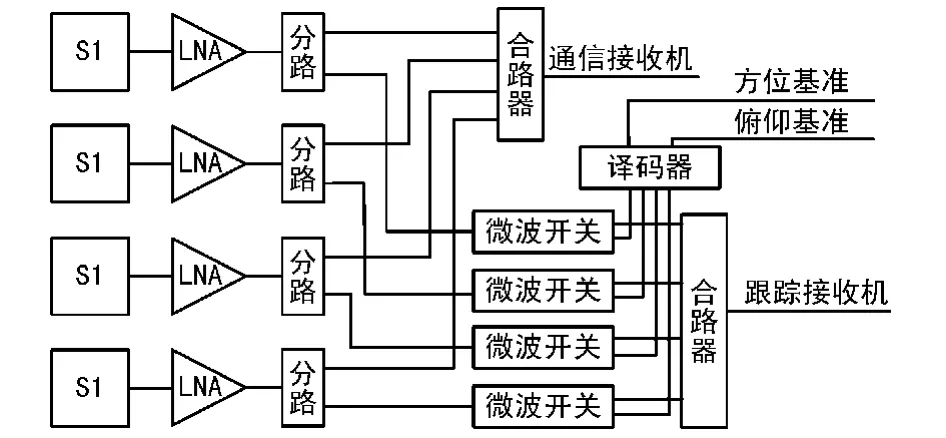
图3 跟踪网络
由于四喇叭阵列馈源的极化调整是通过馈源的整体旋转来实现,当天线处于斜极化工作状态时,跟踪接收机解调出来的方位误差信号和俯仰误差信号同时包含了天线在方位面和俯仰面的误差分量,因此要通过一个绕P轴(极化轴)的欧拉旋转,把误差信号分解到A、E轴上,如图4所示,旋转角度为当前信号的极化甲板角。
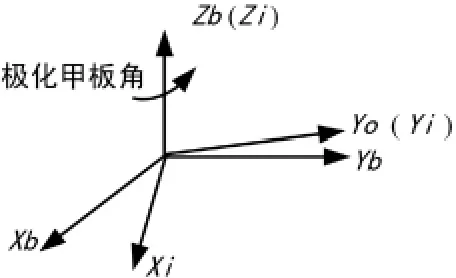
图4 误差信号在极化轴上的旋转
馈源沿极化轴P旋转矩阵为:
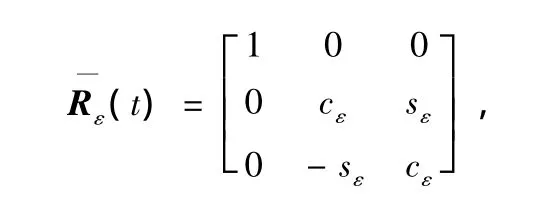
其中:cε=cos(P);sε=sin(P)。
解调出的2个方向的误差信号通过旋转矩阵分配到方位、俯仰上:
图5为采用四喇叭馈源相控波束倾斜自跟踪天线,经过摇摆台动态跟踪试验,实测结果跟踪精度与单脉冲相当。

图5 四喇叭阵列馈源相控波束倾斜自跟踪天线
4 结束语
相控波束倾斜跟踪,结合圆锥扫描跟踪原理[5],采用相控技术使波束产生倾斜并作圆锥扫描,克服了机械扫描的滞后,具有构成简单、功能独立性好、采样频率高以及波束控制精准等特点,且不存在相移影响的问题,不需校相,其跟踪精度与单脉冲跟踪接近,而设备的复杂性较单脉冲体制大大降低使可靠性得到提高,造价比单脉冲体制低。可以作为长期滞空的临近空间卫星通信天线跟踪的一种新的优选方案。
[1] 柴霖.临近空间测控技术需求分析[C]//第25届飞行器测控学术年会论文集,2010:99-102.
[2] 杨秉,杨健.临近空间飞艇运行环境及其影响分析[C]//2008年中国浮空器大会论文集,2009,11:395-398.
[3] 王聪,汪名扬.高动态条件下的“动中通”稳定跟踪系统[J].指挥信息系统与技术,2011,2(3):23-25.
[4] 李靖,李强,李硕.单脉冲跟踪接收机相位自动校正的研究[J].无线电工程,2008,38(5):56-58.
[5] 赵来定,胡正飞,曹伟,等.卫星通信圆锥扫描跟踪[J].现代雷达,2006,28(3):76-78.
[6] 汪晓燕.单通道单脉冲角跟踪系统的研究[J].电讯技术,2005(3):117-120.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
航天器环境工程(2022年1期)2022-03-11
北京航空航天大学学报(2020年3期)2021-01-14
科技传播(2019年22期)2020-01-14
科教新报(2019年16期)2019-09-10
科学导报(2019年24期)2019-09-03
北京航空航天大学学报(2018年1期)2018-04-20
中国惯性技术学报(2017年1期)2017-06-09
制导与引信(2016年3期)2016-03-20
电气电子教学学报(2016年6期)2016-03-02