
基于DSP快响应虚拟自整角机在机床中的应用研究
2013-01-15 09:00王秋平张熹彦
常州工学院学报 2013年3期
王秋平,张熹彦
(1.常州亚美柯宝马电机有限公司,江苏 常州 213072;2.上海澜起科技有限公司,上海 200012)
0 引言
自整角机在自动化设备中是用作同角度旋转的电机,不过它并非用机械轴连接两电机,而是通过电传动。通常一个电机作为发送机发送电信号,另一个成为接收机,按接收的信号旋转相应机械角度,从而达到驱动控制目的。随着高速处理器的不断进步,可采用DSP进行角度检测和电机转子信号的发送,如图1所示。
采用TMS320F28335 DSP作为控制核心(参见:TMS320F/C24x DSP Controllers Reference Guide,CPU and Instruction Set.Literature Number:SPRU 160C,June1999),该DSP芯片具有150MHz的高速处理能力,具备32位浮点处理单元,6个DMA通道支持ADC、McBSP和EMIF,有多达18路的PWM 输出,其中有6路为TI特有的更高精度的PWM输出(HRPWM),12位16通道 ADC。与前代 DSC 相比,平均性能提升50%,并与定点C28x控制器软件兼容。
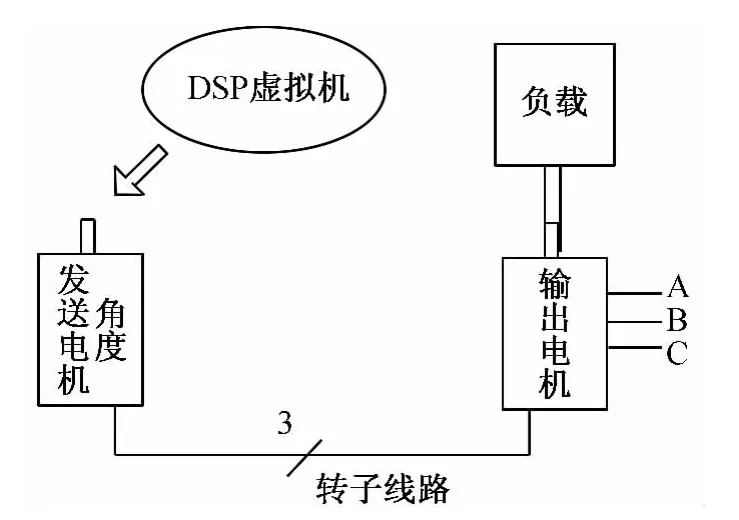
图1 用DSP为核心的虚拟电机作发送机示意图
目前数控机床存在的问题是:当机床断电后,一旦工作台被移动,那么开机后就要重新对基准。即使采用对机械原点的方法再来找基准,也是间接的,会产生一定的误差。用DSP进行转子信号的发送,可以实现数字信号储存、记忆。这种能作数字信号储存、记忆的自整角机可理解为一种虚拟式自整角机。
1 虚拟自整角机原理
数控机床中利用自整角机作进给驱动[1-2],其中一个是实型自整角机(接收机),另一个是虚拟自整角机(发送机)。虚拟自整角机可利用CNC的部分资源来实现。
当实型机的相位与虚拟机的相位发生偏差时(如图2所示),虚拟机的三相全桥输出板与实型机之间就会产生电流,该电流使实型机旋转,直至与虚拟机的相位差回归为零。在这里,虚拟机相当于位置给定,其相位受CNC控制,虚拟机的相位确定了就等于确定了进给位置,机床断电后,CNC自动将保存的虚拟机相位信息保存到存储器中,开机后还原并输出到虚拟机三相全桥输出板,便可让进给电机自动回到原来的角度上。
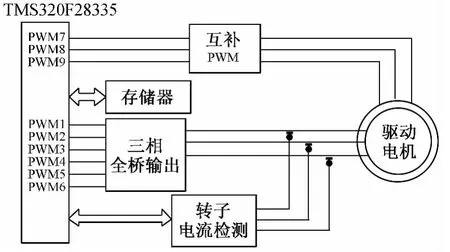
图2 自整角机的进给系统
2 实现方法
2.1 相位信号存取
随着机床的运行,将虚拟机转子相位信号随时记录在RAM中,并利用TMS320F28335内部的多路模拟电子开关交替接通,再逐个进行A/D变换,得到转子电流的数字相位信号。断电时,数字相位信号保留在存储器中,下次来电时从存储器读取相位信息。
2.2 虚拟机的转子输出
数字相位信号通过PWM送到三相全桥输出板转换成虚拟机的转子信号,实现对实型机的相位校准。这里最主要的是虚拟机转子输出的实现问题。可以模仿实型机的输出,虚拟机转子本质上也输出相应的三相正弦电压,利用TMS320F28335内部PWM 来输出脉冲信号去控制输出[3-4],形成等效的虚拟自整角机转子电路如图3所示。图3中X、Y、Z为虚拟机转子电路输出端。
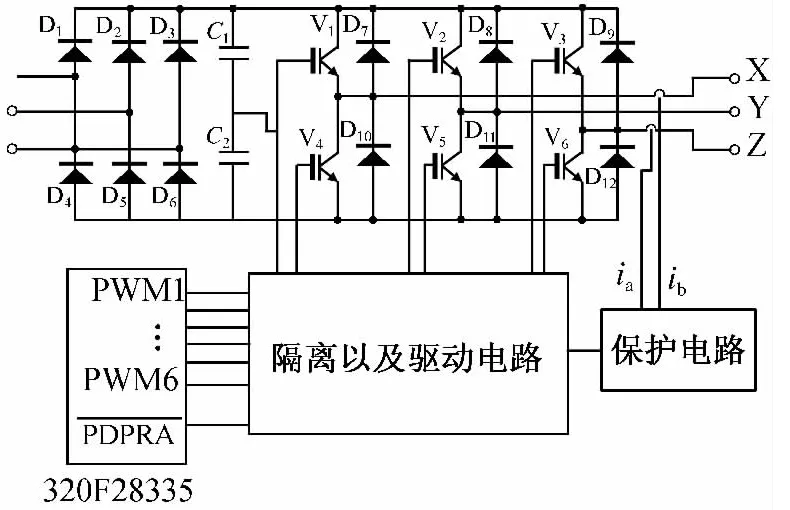
图3 虚拟自整角机转子电路
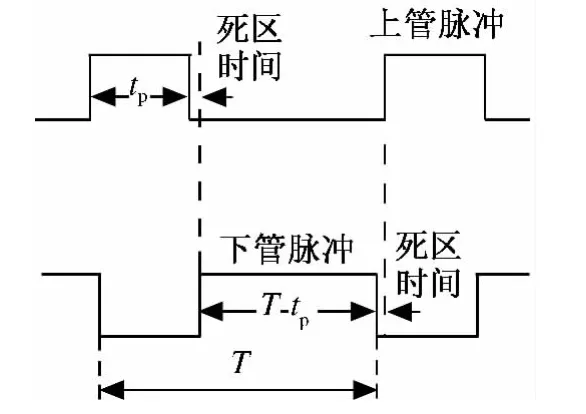
图4 互补式PWM脉冲波形
从图3可以看出,三相桥路中的上下管在任何时候都不能同时开通,TMS320F28335内部的6个互补式PWM脉冲信号正好满足要求,如图3所示,上下管之间还有一个死区时间,该时间可以避免上下管同时开通。在对TMS320F28335内部的6个数字比较器CMP1~CMP6设置适当的参数后就可得到相应的脉宽信号,达到PWM控制的目的。
3 控制系统的稳定性分析
自整角机的转矩—速度特性曲线有负的斜率,且呈一定的非线性。作为线性化的一种方法,通常把低速部分的线性段延伸到高速范围,用低速直线近似代替非线性特性。[5]此外,也可用小偏差线性化方法。一般,自整角机机械特性的线性化方程可表示为:

其中,ωm为自整角机角速度;CΩ为阻尼系数;Ms为堵转转矩。即:

CM为电机常数;Ua为定子电压有效值。暂不考虑负载转矩,则自整角机输出转矩Mm用来驱动负载并克服机床导轨黏性摩擦,故得转矩平衡方程为:

其中,θm为自整角机转子角位移;Jm和fm分别为折算到自整角机上的总转动惯量和总黏性摩擦系数。
由式(1)、式(2)、式(3)消去中间变量Ms和Mm,并在零初始条件下求拉氏变换,令Ua(s)=,可求得自整角机的传递函数为:

其中,Km=CM/(fm+CΩ)为电机传动系数;Tm=Jm/(fm+CΩ)为电动机时间常数。因Ωm(s)=sθ(s),由式(4)可推导出:

式(4)和式(5)是自整角机传递函数的两种不同形式,式(4)是以角位移为输出的传递函数,式(5)是以角速度为输出的传递函数。
根据自整角机传递函数,可得出特征方程:

因为Tm>0,所以此系统是稳定的。
4 系统软件设计
虚拟自整角机的主程序包括程序初始化模块、定时器中断服务、模拟量定时采样模块、相位信号的捕获模块、加速度控制模块、电流调节模块等等。其中,定时器中断服务程序给电流、加速度控制模块提供固定的时钟触发,以此时间作为各个模块的调节基准。当程序运行时,首先关断系统的总中断,完成初始化,接收到运转信号后,开启总中断,进入程序调节的循环体,直到程序运行结束。电流环调节的时间最短,反映最快,其调节时间长短与电流信号滤波参数、DSP采样速度、CPU时钟周期、软件滤波程序等都有关系,一般时间为零点几毫秒。而加速度时间设定为电流调节环的N倍,相位和加速度调节环的调节次数可以现场测定调节时间而确定。系统的主程序流程图如图5所示。

图5 主程序图
5 结论
在控制系统中采用虚拟自整角机,不但能把断电后意外的角移位纠正过来,而且能使误差减小至零。但是一旦意外的移位折合到实型机上的位移超过±π角时,相位控制带来的误差将是自整角机一个周期的误差。为此在床身上加上分辨率较低的绝对光栅,这种较粗的光栅信号使位置初定在自整角机的一个周期范围内(1/2丝杆螺距),这样就解决了意外移动超过一个周期范围时所造成的影响。
[1]梁启权.基于TMS320F28335电能质量监测装置的设计与实现[D].北京:北京交通大学,2012.
[2]刘陵顺,高艳丽,张树团,等.TMS320F28335DSP原理及开发编程[M].北京:电子工业出版社,北京,2012.
[3]刘洋,赵金.基于DSP+CPLD的多轴矢量运动控制器的设计[J].电气传动,2005(12):15-17.
[4]陈伯时,陈敏逊.交流调速系统[M].北京:机械工业出版社,1998.
[5]张建生,邹一琴,张燕红.虚拟式自整角机在数控机床进给中应用的研究[J].电气传动,2005(12):49-50.
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
科教导刊·电子版(2022年5期)2022-03-19
汽车维修与保养(2021年8期)2021-02-16
测控技术(2018年7期)2018-12-09
四川冶金(2018年1期)2018-09-25
光学精密工程(2016年4期)2016-11-07
工业设计(2016年4期)2016-05-04
通信电源技术(2016年1期)2016-04-16
电机与控制应用(2015年3期)2015-03-01
中国塑料(2014年12期)2014-10-17
