
九子镜多镜望远镜系统仿真方法的研究
2013-01-15 09:00吴峰穆亚茹张晓玲
常州工学院学报 2013年3期
吴峰,穆亚茹,张晓玲
(常州工学院电子信息与电气工程学院,江苏 常州 213002)
0 引言
空间遥感器所能达到的分辨率代表了一个国家空间技术的发展水平,分辨率要求越高,遥感器光学系统所需的口径越大,但重量、体积和成本也越高,甚至无法制造。稀疏孔径系统使用多个小孔径光学面代替单块大孔径光学面,在获得相同等效口径的前提下,降低了制造难度,有效节约了成本,为高分辨率遥感器的发展提供了一种新途径。目前国内外大多研究以稀疏孔径理想模型[1]为基础,不考虑光学面的曲率,这类研究结果与实际系统有差异[2],研究实际稀疏孔径系统具有更重要的意义。
实际稀疏孔径系统分为多镜望远镜、多望远镜望远镜[3]两种结构。其中多镜望远镜系统是在一个反射式望远镜的基础上,使用多个更小的子镜来代替整块主镜。多望远镜望远镜系统是将多个小口径的子望远镜排列组合成一个大口径的成像系统,通过相干叠加各子望远镜的成像光束,获得整个系统的成像。制造和安装误差是影响系统像质的重要原因[4],研究多镜望远镜、多望远镜望远镜系统仿真方法,能为降低系统误差、提高系统的有效性奠定技术基础。
目前国内外关于实际稀疏孔径系统仿真方法的报道还比较少见。本文运用ZEMAX光学设计软件扩展编程功能,研究和给出仿真多镜望远镜系统方法。仿真九子镜多镜望远镜系统的主镜为球面,由九个子镜组成。设计结果表明,本文仿真方法能为深入研究稀疏孔径系统提供技术支持。
1 仿真原理
仿真多镜望远镜系统的基本方法是在已设计完成的反射式或折反式系统的基础上,将稀疏孔径结构的子镜替代主镜,子镜与主镜对应部分相重合。光学设计软件ZEMAX是目前世界上用于设计和仿真光学系统的主流软件,但该软件中现有的光学面面型都不足以模拟稀疏孔径结构。本文探讨了在ZEMAX软件中设计复杂面型的方法,仿真九子镜多镜望远镜系统。
光线追迹是ZEMAX软件采用的主要方法。当由物面发出的光线到达各光学面上某点时,利用折射、反射定律,或者衍射、偏振规律,计算光线的位置、出射方向、强度、光程等参数,以此开展系统优化设计和分析,并统计光学系统成像质量。ZEMAX软件正是通过规定入射光线经过光学面所具有的属性来定义光学面面型的,如,标准面(包括平面或球面)、非球面(包括奇次非球面、偶次非球面)等。对于现有的光学面面型,软件建立了对应的动态链接库D11文件,通过接口调用这些文件,模拟光学系统所需的面形。ZEMAX软件允许用户通过程序设计,模拟其他特殊的光学面面型,并建立对应的DLL文件。由此可见,设计由多个子镜组成的稀疏孔径结构面型,重点在于规定光线经过该面后的传播属性,再通过编程生成用户定义光学面DLL文件,供软件调用。
九子镜多镜望远镜是将Golay3结构的每个子镜分别再以Golay3结构三子镜代替,共9个子镜。本节在分析Golay3结构的基础上,讨论九子镜稀疏孔径结构,从而确定光线经过该面形的传播属性,设计用户定义光学面,实现仿真九子镜多镜望远镜。
1.1 Golay3结构分析
Golay结构是1971年由Golay提出的一类非冗余稀疏孔径结构[5],通常子镜数选为3的倍数,当子镜数为 3、6、9 时,分别称为 Golay3、Golay6、Golay9结构,其中Golay3结构最简单。图1给出了当主镜为平面时,主镜和Golay3结构子镜的位置关系,相对于中心 O,三子镜 V1、V2、V3相互间隔120°,且以主镜的边缘为外接圆。

图1 平面Golay3结构
当主镜为球面时,Golay3结构的子镜在主镜上的分布如图2所示,三子镜和主镜的曲率半径一致,相对于中心轴即光轴相互成120°。当已知其中一子镜的顶点坐标时,即可通过旋转关系求出另外两子镜的顶点坐标。以其中V1子镜为代表,建立坐标系统,取主镜顶点P为原点,反射镜中心轴取为Z轴,正方向沿0°视场主光线的传播方向,X轴、Y轴与Z轴相互垂直,构成右旋坐标系,如图3所示。其中BCP为主镜面,CABV1为一子镜,V1为其顶点。假设球面主镜的曲率半径是R,它的口径为D,子镜的口径是d,图3中α、β为决定子镜位置的参数,得到:

图2 球面Golay3结构
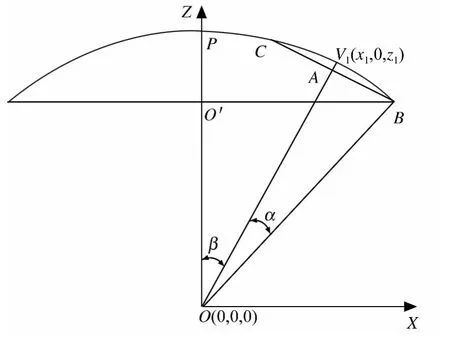
图3 球面Golay3结构坐标

V1的坐标是(x1,0,z1),那么:

求得V1的坐标后,只需将(x1,0,z1)绕 Z轴旋转120°或者-120°,按照式(3)就可以得到另外两子镜的顶点位置。

其中i=2或3,代表另外第二或第三个子镜,旋转角度θ分别取为120°、-120°。
子镜Vi上任意一点的坐标(x,y,z)必定满足:


1.2 九子镜结构分析
先考虑主镜为平面的情况,将图1中的每个子镜,按照Golay3结构分别用三子镜代替,即得到九子镜结构,如图4所示。该结构可看成由三组 Golay3结构组成,其中 M11、M12、M13为一组,M21、M22、M23为一组,M31、M32、M33为一组。
当主镜为球面时,仍令主镜曲率半径为R,口径为D,圆V1代表图3中的子镜,其口径为d1,子镜 Mij口径为 d,其中 i、j=1、2 或 3。参照上述方法以子镜 M11为代表建立坐标系,角度 α、β、α1、β1如图5所示。

图4 平面九子镜结构
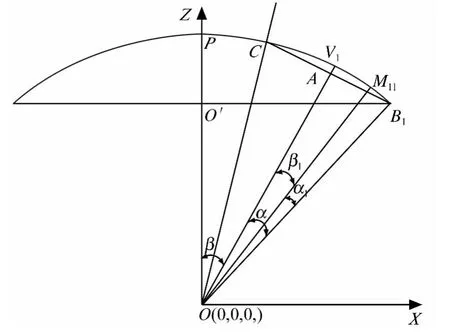
图5 球面九子镜结构坐标系
V1的坐标(x1,0,z1)由式(2)求得,设 M11的坐标是(x11,0,z11),得到:



设 M12和 M13的坐标值分别为(x12,y12,z12)、(x13,y13,z13),可由 M11绕 OV1轴转120 °或 -120 °得到:

其中,j=2或3,θ分别取为120 °、-120 °。
由图4可见,M1j绕Z轴旋转120°或-120°,即得到 M2j、M3j,其中,j=1、2 或 3,因此:

θ分别取为120°、-120°,由此可确定所有子镜的顶点坐标。
子镜 Mij上的任意一点(x,y,z)必定满足:

1.3 九子镜稀疏孔径结构球面光学面的设计
设九子镜稀疏孔径结构球面光学面的曲率半径为R,入射光线入射到球面上坐标为(x,y,z)的点,入射光线的方向余弦矢量为(l,m,n),光强度为I,出射光线的方向余弦矢量为(l',m',n'),强度为I',根据文献[6],得到:
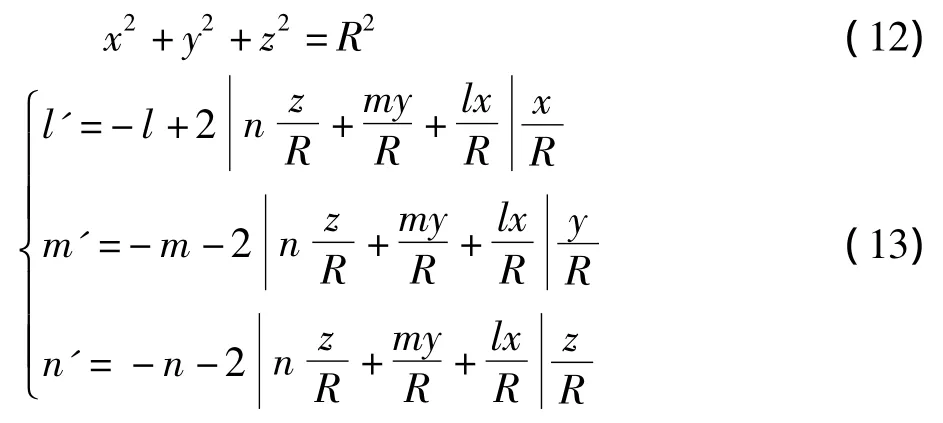
如果对于i和j取1、2或3中任意一个值,(x,y,z)都不能满足式(11),则 I'=0。如果当 i和 j取某值时,(x,y,z)能满足式(11),则 I'=I。由此确定子镜在主镜球面上的分布,仿真稀疏孔径结构面形。
2 仿真过程和结果
采用ZEMAX软件仿真九子镜多镜望远镜系统,具体过程如下:
首先,设计全孔径系统。根据指标要求,设计完成主镜为球面的反射式或折反式全孔径光学系统,成像质量满足要求,通常需达到衍射极限。
然后,编程设计九子镜稀疏孔径结构球面面形。对于给定的V1,直径d1和子镜直径d,按照式(5)~式(10)确定各子镜顶点位置,再按照式(11)~式(13)确定光线经过主镜后的强度、出射方向。使用C语言将以上计算过程以程序代码的方式实现,并编译成动态链接库DLL文件,作为新的面形文件。
最后,通过扩展接口,在ZEMAX软件中调用DLL文件,修改主镜面形为九子镜结构面形,完成仿真。
为使结果简单明了,本文先设计了口径D=50 mm,F数为4的卡塞格林二反系统,其中主镜为球面,次镜为非球面,光阑置于主镜处。如果主镜口径增大,应添加透镜或反射镜以校正像差,主镜转换为稀疏孔径结构的方法类似。
在此基础上,取子镜的口径d=4.5 mm,九子镜多镜望远镜系统的最终仿真结果如图6所示。
主镜由九个相同大小的子镜组成,被它们反射的光线经过次镜反射后到达像面,各光学面参数如表1所示。子午、弧矢方向的调制传递函数MTF分布曲线如图7所示,它们与衍射极限时的MTF曲线重合,光学系统达到衍射极限。由于光学面的复杂化,MTF值并非随着空间频率的增加单调降低,而是出现了起伏。调制传递函数MTF的二维分布和三维分布如图8所示,它由81个子MTF相互叠加而成,仿真结果与文献[7]相符。

图6 九子镜多镜望远镜系统仿真结果
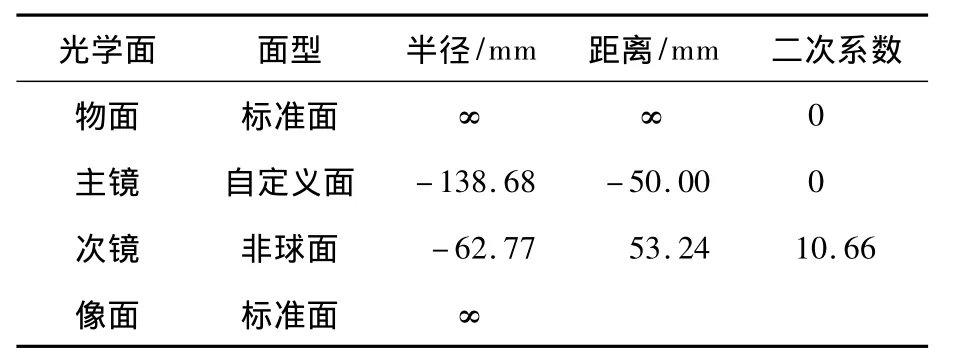
表1 九子镜多镜望远镜系统光学面参数

图7 系统子午、弧矢方向的MTF曲线

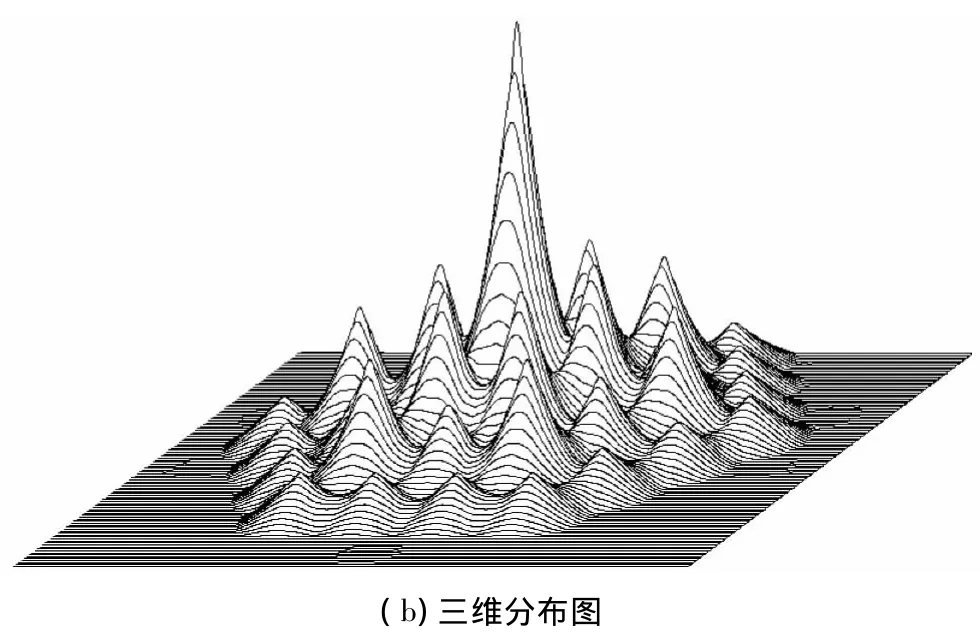
图8 九子镜多镜望远镜系统MTF的分布
3 结论
稀疏孔径系统为设计大口径高分辨率遥感器提供了有效的解决途径,多镜望远镜系统是一种实际使用的稀疏孔径系统。在九子镜多镜望远镜中,利用子镜间存在的旋转关系,可确定各子镜的位置和范围。利用现有光学设计软件的扩展接口,通过程序设计规定光线经过主镜光学面的传播属性,建立模拟稀疏孔径结构的用户定义面,仿真九子镜多镜望远镜,该方法可行。仿真方法为研究系统特性、降低制造和安装误差提供了技术支持。
[1]伏西洋,王大勇,郭红锋,等.基于单点像的光学稀疏孔径图像复原[J].北京工业大学学报,2012,38(5):793-796.
[2]Wu Feng,Wu Quanying,Qian Lin.Analysis of the Characteristics of the Golay3 Multiple-mirror Telescope[J].Applied Optics,2009,48(3):643-52.
[3]Wu Quanying,Wu Feng,Qian Lin,et al.Demonstration of the Golay 3 Multiple-mirror Telescope with a Spherical Primary Mirror[J].Optics and Laser Technology,2012,44(4):749 ~ 755.
[4]Wu Quanying,Fan Junliu,Wu Feng,et al.Error Analysis of the Golay3 Optical Imaging System[J].Applied Optics,2013,52(13):2966-2973.
[5]Golay M.Point Arrays Having Compact Non-redundant Autocorrelations[J].J.Opt.Soc.Am.,1971,A 61:727-723.
[6]张以谟.应用光学[M].北京:机械工业出版社,1982:139.
[7]吴泉英,钱霖,沈为民.复合三子镜稀疏孔径光瞳结构的研究[J].光学学报,2006,26(2):187 ~192.
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
哈尔滨轴承(2022年1期)2022-05-23
小哥白尼(军事科学)(2022年1期)2022-04-26
光电工程(2020年9期)2020-09-29
石家庄铁路职业技术学院学报(2019年3期)2019-10-30
制造技术与机床(2019年8期)2019-09-03
制造技术与机床(2018年9期)2018-09-19
中国光学(2017年4期)2017-08-01
人大建设(2017年9期)2017-02-03
光学精密工程(2016年11期)2016-12-19
