高空间分辨率遥感影像的多智能体分割方法研究
2013-01-11 02:08钟燕飞张良培
测绘学报 2013年1期
赵 贝,钟燕飞,张良培
武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉430079
1 引 言
高空间分辨率遥感影像(high spatial resolution remote sensing image,HSRI)具有丰富的纹理信息和形状信息,与中低分辨率影像相比,能够获取更精细的地物信息。然而,随着影像空间分辨率的提高,影像中地物的光谱分布更复杂,不同地物的光谱相互重叠,地物信息呈现高度细节化,影像中的地物类内方差增大,不同地物类之间方差减小[1],这些特点使得计算机解译的方式必须要由传统的面向像元光谱处理的方式转变为面向对象的多特征处理方式[2]。面向对象的处理方式通常通过影像分割[1-2]获取由空间相邻、光谱相近的多个像素所组成的对象。图像的分割处理,一方面可以减小地物类内的方差,另一方面可以为计算机解译提供对象的纹理信息和形状信息,增大地物类之间的方差,进而增大地物类别的可分性,使得分类识别的精度提高。
常用的遥感影像分割算法主要有基于边缘的分割方法和基于区域的分割方法。由于遥感影像地物类别的复杂性,基于边缘的分割方法往往得不到封闭的区域[3-4],不利于提取 HRSI的对象信息。常用的基于区域的分割算法有分裂合并算法[4]、基于形态学分水岭算法[4-5]、分形网络演化算法(fractal net evolution approach,FNEA)[6-8]。其中,分裂合并算法是一种运行效率高的基于四叉树的分割方法[4],但不能充分利用区域的同质性和连续性,对于地物复杂的遥感影像,分割效果较差;基于形态学分水岭算法[4-5,9-10]将影像的梯度幅度图作为地形图,像素的梯度幅度值作为像素的海拔高度,每一个局部梯度幅度极小值的影响区域形成集水盆,集水盆的边界则为“分水岭”,但分水岭算法对遥感图像中的弱边缘敏感,容易产生严重的过分割现象,通过预处理操作、标记法、后处理等方法提高算法的可用性[9-10]。FNEA算法根据局部最适对象(local mutual best fitting objects)合并准则,结合对象的光谱信息和形状信息进行判定,能够获得较好的分割结果。此外,随着计算机科学、人工智能等领域的发展,大量新的理论与方法,如模糊集、神经网络、图论、水平集、形态学等理论,已被引入到分割中,国内外学者提出了多阈值模糊自动分割[11]、脉冲耦合神经网络分割[12]、基于最小生成树的图论分割[13]、多维水平集分割[14]、均值漂移分割[15]等理论与方法,提高了HRSI的分割效果。以上分割算法中,FNEA方法已作为HRSI处理软件eCognition中的核心分割算法而得到广泛的应用。然而,该方法采用的是限制每次循环中对象被遍历一次的并行全局控制策略[6-7],不能很好地利用同质区域在空间上的连续性。
为了提高HRSI分割的效果,本文提出一种基于多智能体理论的高空间分辨率遥感影像分割方 法(high resolution remote sensing image segmentation algorithm based on multi-agent theory,MARSS)。多智能体(multi-agent)理论[16-18]在全局控制上具有并行运算能力和很高的灵活性,使得其处理工程问题的效率更高,已成功应用于图像分割[19-21]、通信[17]、医学影像处理[22-25]等领域。
2 基于多智能体理论的高分辨率遥感影像分割算法
智能体的概念来源于人们对人工智能的认识,已广泛应用于物理、生物、计算机、社会等领域中复杂系统的模拟[18]。智能体[16-18]感知所处环境,根据获取的环境信息和自身状态,作用于环境,使得智能体与环境存在很强的交互性和灵活性。同时,当多个智能体同时工作时,智能体之间保持较强的独立性,使得多智能体在全局控制上具有并行运算的特点。
本文基于多智能体系统与环境的交互性强、灵活性高、并行控制的优点,利用多智能体扩散、复制、繁殖等操作算子提出了基于多智能体理论的高分辨率遥感影像分割方法(MARSS)。为了便于描述 MARSS方法,对以下变量进行说明:
(1)待分割的 HSRIEs={x1,x2,…,xN}为MARSS算法的工作环境,xN为图像中的第N个像元,N为影像的像元数,初始化时每个像素xN视为一个图斑对象;
(2)高分辨率图像分割时的图斑对象集合为O={o1,o2,…,oT},oT为第T个图斑,T为图斑总个数;
(3)智能体集合AG={Ag1,Ag2,…,Agn},每个智能体Agn包含感知器Pn,合并对象的规则Rn,状态属性Asn和行为集合Acn4个部分,在MARSS方法中的具体含义如表1所示。Pn和Acn体现智能体与图像的强交互,Asn和Acn的设置使智能体在分割中更灵活。
为方便说明MARSS的原理,以图1中的示例描述其算法流程。在整个图像分割过程中,多智能体系统中任意一个智能体Agn在不同环境下,通过扩散、繁殖、死亡等行为搜索相互最佳合并对象,并以相互最佳合并准则作为对象的合并判定准则进行合并操作,最终达到分割的目的。具体如下。
2.1 初始化
初始化时(图1(a)),多智能体系统以一定的分布方式(如均匀分布)将多智能体分布在图斑对象集合O={o1,o2,…,oT}上,初始化时每个像元即是一个图斑。此时,智能体Agn的感知器Pn指向对应的对象oT,同时状态属性(ae,pr,po,c)=(0,false,true,true)。

图1 多智能体控制的合并策略Fig.1 The strategy of controlling merging procedure by multi-agent system
2.2 智能体的行为
在初始化后,MARSS通过智能体的扩散、繁殖、死亡等行为进行分割操作。
2.2.1 智能体扩散
根据Rn,假定Agn找到oT的候选合并对象oT+1,但oT+1的候选合并对象不是oT(图1(b)),则oT和oT+1的异质性大,Agn选择扩散行为(图1(c))。Agn扩散到oT+1,即Pn指向oT+1,同时Agn的年龄增加,其他属性不变,表达式如式(1),其中,Omin()表示最佳合并对象符

2.2.2 智能体繁殖
当Agn所指对象oT+1的候选合并对象为oT+2,同时oT+2也是oT+1的候选合并对象,即满足了相互最佳合并对象条件,那么Agn选择繁殖行为(图1(c))繁殖子代智能体,并将子代智能体加入原智能体集合,同时Agn合并oT+1与oT+2(图1(d)),使pr=true,其表达式如式(2)所示。其中,{Agn}m为Agn繁殖的子代智能体集合,m是与Agn相邻的对象数,o′T+1为合并后的新对象
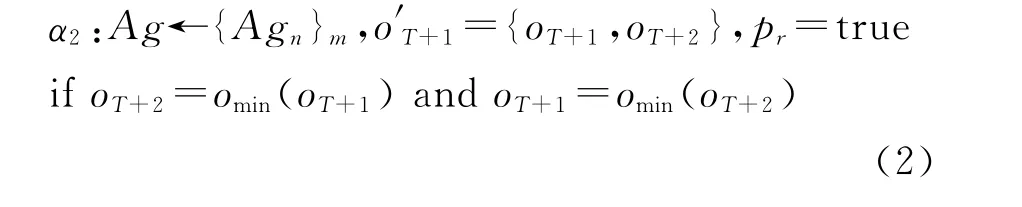
2.2.3 智能体死亡
当指向oT的Agn满足以下4个条件中的任意一个条件,Agn选择死亡行为,Agn被从智能体集合中清除,其表达式如式(3)所示

(1)Agn的年龄属性ae超过了规定的智能体年限Th,即ae>Th。
(2)Agn已选择过繁殖行为,即pr=true。
(3)Agn找不到oT的候选合并对象oT+1,即c=false。
(4)Agn指向的对象oT已被合并到其他对象中,即po=false。
智能体的行为需要设置两个参数:智能体年限Th和智能体的初始化个数n。其中,Th的选择原则为使所有智能体有能力在扩散时遍历整个图像范围,因此Th满足4n·T2h>N,N为图像大小,当Th超过一定值后,对分割结果造成的影响非常小[18]。在一定分布方式下,参数n决定了智能体感知器Pn所指对象。
2.3 对象合并的判定准则——相互最佳合并准则
智能体需要根据合适的判定准则判定对象是否为最佳合并对象,MARSS算法在分割过程中的3种不同行为,都是采用相互最佳合并准则作为智能体的对象合并准则Rn。相互最佳合并准则包含两部分:候选合并对象的判定,相互最佳合并对象的判定[6]。
2.3.1 候选合并对象的判定
相互最佳合并准则中候选合并对象判定见式(4)。根据式(4)以及式(5)~(9),智能体能利用图斑对象的光谱信息(式(6))和形状信息(式(7)~(9))找到其候选合并对象

式中,o*min为候选合并对象;oT为Pn所指向的对象;oT+j为oT相邻对象;Scale为分割的尺度。c(oT,oT+j)为oT与oT+j的合并代价,计算方法见式(5)。合并代价函数中包含光谱信息合并代价cclr(oT,oT+j)和形状信息合并代价cshp(oT,oT+j),计算公式分别为式(6)和式(7),wshp为形状信息的权重
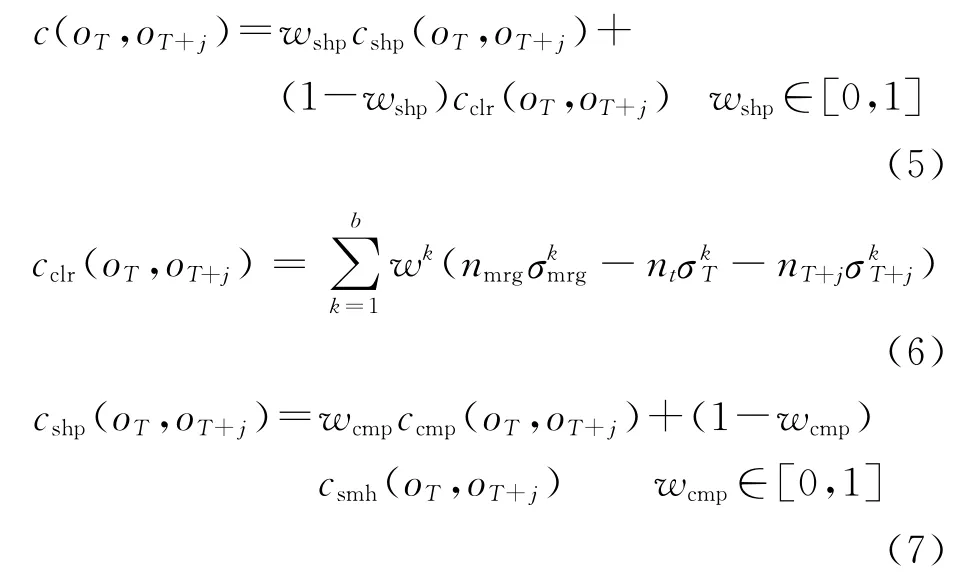
式(6)中,σkT、σkT+j、σkmrg分别代表oT、oT+j和合并后对象omrg在k波段上所含像元的标准差;nT、nT+j、nmrg分别代表oT、oT+j、omrg中像元的个数;b代表影像的波段数;wk为第k个波段的权重。式(7)中,包含对象的紧凑度合并代价ccmp(oT,oT+j)和光滑度合并代价csmh(oT,oT+j),计算公式分别为式(8)和式(9),wcmp为紧凑度权重系数。式(8)中,lT、lT+j、lmrg分别代表oT、oT+j、omrg的周长。式(9)中,bT、bT+j、bmrg分别为oT、oT+j、omrg外接矩形的周长。

智能体的候选合并对象判定公式同时考虑了影像的光谱信息和形状信息,需要设置4个参数:第k波段的权重wk、形状权重wshp、紧凑度权重wcmp、分割尺度Scale。在分割中,wk可根据波段重要性赋值,波段重要,则权重大。由于分割所用信息不可缺少光谱,wshp值不可超过0.9[8]。wcmp可根据地物状态选择,当地物紧凑时,选择较大值,地物分散时选择较小值。Scale控制着最终图斑的大小,Scale值变大,最终获得的图斑也相应变大。
2.3.2 相互最佳合并对象的判定
(1)寻找候选合并对象。对给定的尺度Scale,根据式(4),若oT的候选合并对象为oT+1。
(2)确定相互最佳合并对象。根据式(4),若oT+1的候选合并对象是oT,则oT和oT+1为相互最佳合并对象。
2.4 分割算法的流程
MARSS算法的处理流程如图2所示。
(1)初始化。每个像素xN初始化为一个图斑oN,得到集合O={o1,o2,…,oN},m个智能体组成的集合Ag={Agn}m,属性Asn=(ae,pr,po,c)=(0,false,true,true),Pn指向oN。
(2)如果Ag=∅,输出分割结果O={~o1,~o2,…,~oT},否则执行步骤(3)。
(3)从Ag中取出Agn。判定Agn的状态,如果Agn执行过繁殖行为(pr=true)、年龄超过阈值(ae>Th)、Agn找不到候选合并对象(c=false),或者Agn指向的对象oT已被合并到其他对象(po=false)中,则Agn死亡并被清除出智能体集合Ag,执行步骤(2),否则执行步骤(4)。
(4)寻找相互最佳合并对象。Agn计算得对象oT的候选合并对象为oT+1,对象oT+1找到的候选对象是oT,Agn进行繁殖行为,否则Agn进行扩散。进行步骤(2)。

图2 MARSS算法流程图Fig.2 Flow chart of multi-agent high resolution remote sensing image segmentation algorithm
3 试验与分析
在当前的遥感影像分割软件中eCognition软件中的多尺度分割(multi-resolution segmentation)[26],即FNEA分割算法,表现出了优良的性能。为了验证 MARSS算法的有效性,采用HSRI的两组数据集,与FNEA的试验结果进行对比分析。HSRI分割结果的对比评价方法采用了非监督的评价方法[27-28]。
3.1 分割结果评价方法
图像分割算法的评价方法可以分为3类:直观评价、监督评价和非监督评价。在监督评价中,获取分割参考影像带有很强的主观性,非常耗时[29],获取复杂遥感影像的高质量参考影像困难。为了对遥感影像分割结果的整体效果进行定量评价,本文采用了文献[27—28]中的非监督评价方法。该方法通过统计分割后的图块信息,得到分割结果的全局得分(global score,GS),如式(10)所示,GS包含两部分:衡量整体图斑内分割效果的加权方差Var(式(11));衡量整体图斑间分割效果的全局Moran’s I指数MI(式(12))
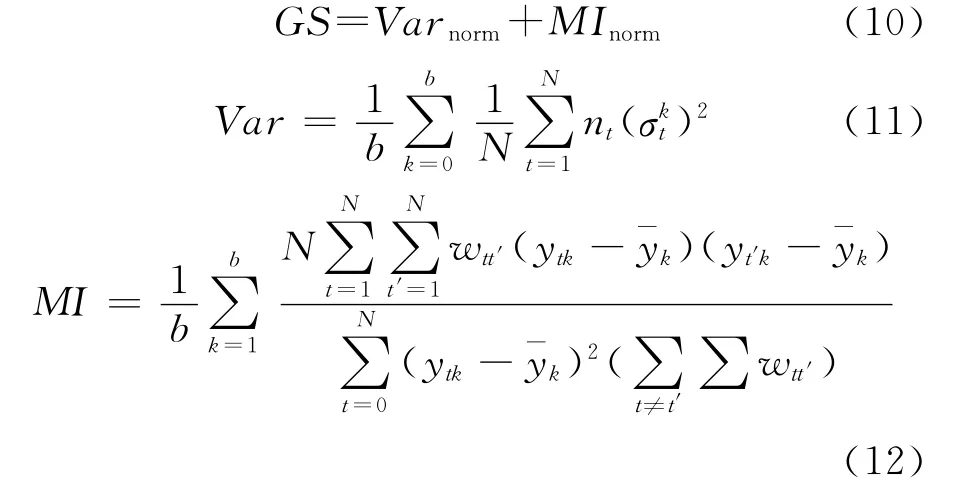
式(10)中,Varnorm和MInorm分别为Var和MI归一化后的值,归一化计算公式如式(13)所示;X为变量(Var或MI)Xmin,Xmax分别为变量的最小最大值,Xnorm为归一化后变量值

式(11)中,σkt为第t图斑第k波段的标准差;nt表示图斑对象t的像素个数;N为图斑数;b为波段数。式(12)中,ytk为图斑对象t的第k波度均值;ˉyk为影像第k波度均值;wtt′表明对象t和对象t′的相邻关系,如果对象t,t′相邻,则wtt′=1,否则wtt′=0。
Var值小,表明整体分割图斑内同质性高,图斑内分割效果好;Var值大,表明整体分割图斑内同质性低,图斑内分割效果差,欠分割的程度高。MI值小,表明分割图块间的异质性高,图斑间分割效果好;MI值大,表明分割图块间的异质性低,图斑间分割效果差,过分割的程度高。全局得分GS小,表明整体的分割效果好,欠分割和过分割的程度低。
3.2 分割试验
试验1影像为2010年海南省三亚番村地区400像素×400像素大小分辨率为2.4m4波段的 QuirkBird影像,如图3(a)所示。试验中FNEA算法和MARSS算法参数设置为尺度=50,波段权重wk=1/b、形状权重wshp=0.1和紧凑度wcmp=0.5,b为影像的波段数。MARSS算法初始化采用均匀分布,初始智能体个数为2000,在此分布下对于给定的影像智能体的初始化数量决定了智能体所指对象。FNEA和MARSS分割结果分别如图3(b)、(c)所示。
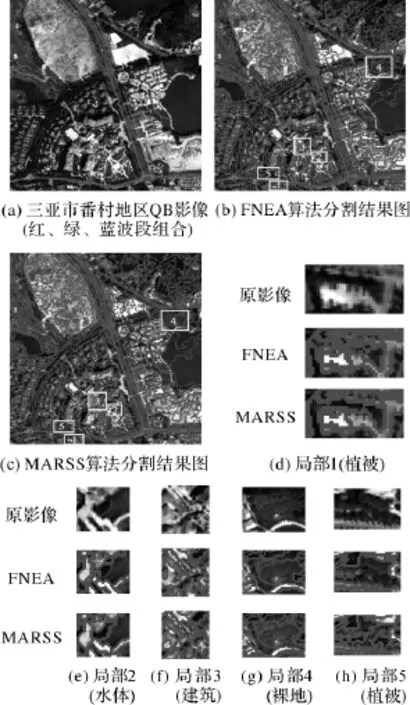
图3 三亚番村地区QB影像的分割结果Fig.3 The segmentation results of QB image in Sanya Fancun
试验2数据为北京地区548像素×463像素大小分辨率为2.4m的QuickBird影像(如图4(a))。波段权重wk、形状权重wshp和紧凑度wcmp参数分别设置为1/b、0.1和0.5,b为影像的波段数。初始智能体为2000的MARSS和FNEA在尺度为50的分割结果分别如图4(b)、(c)所示。
为了能清晰地从目视上对比两种方法的分割结果,对试验1和2分别选择5个和6个子区域进行放大对比分析,选择的区域包含了水体、植被、道路、建筑等典型地物类别,如图3(d)~(h)所示。从图3可知,与MARSS相比,FNEA在同种物质差异较大的区域分割结果较好,如图3(h)中植被区域差异性大,FNEA的分割结果比较完整;与FNEA相比,MARSS算法在不同物质差异较小的区域分割效果更好,如图3(d)植被与道路、图3(e)水体与植被、图3(f)不同屋顶的建筑物、图3(g)裸地边界与植被光谱差别较小,MARSS也能较准确地将其分割出来,保证后续处理(如分类)的正确性。同样,图4(d)~(g)所示的不同物质差异较小的区域分割结果显示,MARSS算法相比FNEA算法的分割结果更好;而在图4(h)、(i)所示的水体植被同种物质差异大的区域,MARSS算法的分割结果相对FNEA算法更破碎。

图4 北京地区影像的分割结果Fig.4 The segmentation results of QB image in Beijing
为了更准确和客观地评价MARSS算法与FNEA算法的分割结果,采用3.1节GS指标对两种算法的分割结果进行定量评价,试验1和试验2的结果如表2所示。

表2 MARSS和FNEA分割结果的统计数据Tab.2 Statistic data of MARSS and FNEA segmentation result
表2的统计结果显示,试验1和试验2中MARSS算法的MInorm指数分别为0.216和0.153,分别小于FNEA算法的0.234和0.233,说明MARSS算法的整体过分割效果好于FNEA算法。试验1中MARSS算法的Varnorm指标为0.551小于FNEA算法的0.566,说明 MARSS算法的整体欠分割效果相比FNEA算法较好;而试验2中MARSS算法的Varnorm指标为0.613大于FNEA算法,说明MARSS算法的欠分割效果相比FNEA算法较差。但是,试验1和试验2中MARSS算法的全局指标GS分别为0.767和0.771,低于FNEA 算法的0.801和0.847,说明MARSS算法整体的过分割和欠分割效果好于FNEA算法。
从原理和试验中分析可知,本文的MARSS算法整体分割效果优于FNEA算法的原因在于,MARSS算法在全局对象合并的策略上去除了FNEA每次循环中所有对象只能被遍历一次的限制,能更好地利用同质区域在空间上的连续性。为了说明MARSS的优点,以图5为例进行说明。如图5(a)所示,在FNEA算法全局控制的某一次循环中,设对 象o1、o2、o3为同一地物,o4为另一地物。根据相互最佳合并准则,对象o1和对象o2为相互最佳合并,对象o1只能被遍历一次,对象o3不再考虑对象o1,则有可能存在对象o4被确定为对象o3的相互最佳合并对象,最终的合并结果中,对象o3被错误地与o4合并(如图5(b))。随着全局控制循环的进行,FNEA算法在o3和o4合并产生的误差会被不断放大。对于MARSS,如图5(c)、(d)所示,该方法取消了遍历次数的限制,智能体Agn通过扩散行为找到相互最佳合并对象o1和o2后,会执行繁殖行为,o1和o2合并后的对象为o′1,繁殖的子代智能体Ag2会将感知器P2指向对象o3,并搜索相互最佳合并对象o′1,最终将 对 象o3、o′1合 并(如 图5(e))。因 此,MARSS算法灵活的全局控制更能顾及同质区域在空间上的连续性,提高对不同物质差异较小的区域(如裸地和植被混合区域)分割效果。而MARSS算法顾及同质区域在空间上连续性的同时,易对同种物质差异大的区域(如植被)产生过分割,但在整体的分割效果上,MARSS算法能实现全局的优化控制,提高高分辨率影像分割结果。

图5 MARSS和FNEA算法的全局合并控制对比示意图Fig.5 Comparison of the global controlling merging Strategy in both FNEA and MARSS
3.3 参数分析
智能体初始化个数和分割尺度两个参数对MARSS算法的分割结果影响较大。本节研究智能体初始化个数和分割尺度对MARSS算法的影响。试验时智能体初始个数选择1000、2000、3000、4000(分 别 记 为 MARSS1000,MARSS2000,MARSS3000,MARSS4000),尺度选择了10到100,步长为10的多个值。试验统计结果如图6。
试验1结果(图6(a))显示初始智能体个数为1000、2000、4000时,MARSS算法在不同尺度上分割结果的全局指标GS均优于FNEA算法。当初始智能体个数为3000时,相对FNEA算法,MARSS算法除了在90和100两个尺度上的分割效果表现不佳,在其他8个尺度上的GS值优于FNEA分割结果的GS值。试验2的结果如图6(b)所示,与FNEA算法比较可知,除在初始智能体个数为4000,尺度为40和80时,MARSS算法分割结果的全局指标GS较大,在其他智能体初始化个数和尺度上,MARSS算法分割结果的全局指标GS均优于FNEA方法的结果。综合以上试验结果可知,对于初始化智能体个数1000、2000、3000、4000,尺度10~100的分割结果,MARSS算法的整体分割效果基本优于FNEA算法,具有较好的稳定性。由于地物分布的不同,不同HSRI的最佳分割尺度都有所差异,MARSS算法在尺度过低和尺度过高时,都不能得到最优的分割结果,需要根据实际影像选择合适的分割尺度。对试验1和试验2影像,MARSS算法和FNEA算法对影像的最佳分割尺度相近,分别为40左右和30左右。

图6 智能体初始化个数和分割尺度参数对MARSS算法分割的影响Fig.6 Effect of both initial number of agents and scale parameters of MARSS algorithm
4 结 论
利用多智能体与图像环境的交互性强、灵活性高、并行运算的优点,本文提出了一种基于多智能体理论的高空间分辨率遥感影像分割算法(MARSS)。该算法在合并准则中,结合影像的光谱信息和形状信息,并利用多智能体并行控制分割的区域合并过程,其全局合并控制策略在保证算法具有并行运算优点的同时能充分考虑区域的同质性和连续性。分割试验结果表明,与FNEA相比,虽然MARSS对同种物质差异大的区域会产生过分割现象,但MARSS算法对于不同物质差异较小的区域分割效果更好。利用全部得分(GS)评价指标对分割结果进行整体分割结果评价时,MARSS算法的GS值要低于FNEA算法,其分割整体效果更优。通过对MARSS算法进行智能体初始化个数参数分析可知,MARSS算法具有较好的稳定性,其整体分割结果优于FNEA算法。
[1] BRUZZONE L,CARLIN L.A Multilevel Context-based System for Classification of Very High Spatial Resolution Images[J].IEEE Transactions on Geoscience and Remote Sensing,2006,44(9):2587-2600.
[2] BLASCHKE T.Object Based Image Analysis for Remote Sensing [J].ISPRS Journal of Photogrammetry and Remote Sensing,2010,65(1):2-16.
[3] CANNY J.A Computational Approach to Edge Detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1986(8):679-698.
[4] GONZALEZ R C,WOODS R E.Digital Image Processing[M].2nd Ed.London:Prentice Hall,2002:793.
[5] VINCENT L,SOILLE P.Watersheds in Digital Spaces:An Efficient Algorithm Based on Immersion Simulations[J].IEEE Transactions on Pattern Alalysis and Machine Intelligence,1991,13(6):583-589.
[6] BAATZ M,SCHAPE A.Multiresolution Segmentation——An Optimization Approach for High Quality Multi-scale Image Segmentation [M]∥STROBL,BLASCHKE,GRIESEBNER.Angewandte Geographische Informationsverarbeitung XII.Heidelberg:Wichmann-Verlag,2000:12-13.
[7] HAPP P N,FERREIRA R S,BENTES C,et al.Multiresolution Segmentation:A Parallel Approach for High Resolution Image Segmentation in Multicore Architectures[C]∥The International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2010,XXXVIII-4/C7.
[8] DEFINIENS A G.eCognition Developer 8User Document Reference Book[M].Miinchen:Definiens A G,2010.
[9] XIAO Pengfeng,FENG Xuezhi,ZHAO Shuhe,et al.Segmentation of High-resolution Remotely Sensed Imagery Based on Phase Congruency [J].Acta Geodaetica et Cartographica Sinica,2007,36(2):146-151,186.(肖鹏峰,冯学智,赵书河,等.基于相位一致的高分辨率遥感图像分割 方法 [J].测绘学 报,2007,36(2):146-151,186.)
[10] LI D R,ZHANG G F,WU Z C,et al.An Edge Embedded Marker-based Watershed Algorithm for High Spatial Resolution Remote Sensing Image Segmentation [J].IEEE Trans Image Process,2010,19(10):2781-2787.
[11] WANG Peizhen,DU Peiming,CHEN Weinan.A New Mixed Genetic Algorithm for Multilevel Thresholding[J].Journal of Image and Graphics,2000,2(1):44-47.)(王培珍,杜培明,陈维南.一种用于多阈值图象自动分割的混合遗传算法 [J].中国图象图形学报,2000,2(1):44-47.)
[12] LI Liwei,MA Jianwen,OUYANG Zan,et al.High Spatial Resolution Remote Sensing Image Segmentation Based on Temporal Independent PCNN [J].Journal of Remote Sensing,2008,12(1):64-69.(李利伟,马建文,欧阳赞,等.基于时刻独立脉冲耦合神经网络的高空间分辨率遥感影像分割 [J].遥感学报,2008,12(1):64-69.)
[13] FELZENSZWALB P F,HUTTENLOCHER D P.Efficient Graph-based Image Segmentation [J]. Journal of Computer Vision,2004,59(2):167-181.
[14] MANSOURI A R,MITICHE A,VA'ZQUEZ C.Multiregion Competition:A Level Set Extension of Region Competition to Multiple Region Image Partition [J].Computer Vision and Image Understanding,2006,101(3):137-150.
[15] HUANG X,ZHANG L P.An Adaptive Mean-shift Analysis Approach for Object Extraction and Classification from Urban Hyperspectral Imagery[J].IEEE Transactions on Geoscience and Remote Sensing,2008,46(12):4173-4185.
[16] WOOLDRIDGE M.An Introduction to MultiAgent Systems[M].New York:John Wiley &Sons Ltd,2002.
[17] SHOHAM Y,LEYTON-BROWN K.Multiagent Systems:Algorithmic,Game-Theoretic,and Logical Foundations[M].London:Cambridge University Press,2009.
[18] JIN Xiaolong,ZHANG Shilong,LIU J.Autonomous Agents and Multi-Agent Systems:Explorations in Learning,Self-organization and Adaptive Computation[M].Beijing:Tsinghua University Press,2003:85-663.(靳小龙,张世武,LIU J.多智能体原理与技术 [M].北京:清华大学出版社.2003:85-160.)
[19] LIU J,TANG Y Y.Adaptive Image Segmentation with Distributed Behavior-based Agents [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1999,21(6):544-551.
[20] WEI Baoquan,ZHANG Liangpei,LI Pingxiang.A Method for Image Segmentation Based on Random Diffused Agents[J].Journal of Image and Graphics,2007,12(12):2113-2118.(卫宝泉,张良培,李平湘.一种基于agent随机扩散的图像分割方法 [J].中国图象图形学报,2007,12(12):2113-2118.)
[21] DONG Jinfang.Road Extraction from Remote Sensing Imagery Based on Autonomous Agent Edge Detection Method[D].Wuhan:Wuhan University,2008.(董金芳.基于自主agent边缘检测方法的遥感影像道路提取研究[D].武汉:武汉大学,2008.)
[22] BENAMRANE N,NASSANE S.Medical Image Segmentation by a Multi-agent System Approach [J].Lecture Notes in Computer Science,2007(4687):49-60.
[23] BOVENKAMP E G P,DIJKSTRA J,BOSCH J G,et al.User-Agent Cooperation in Multiagent IVUS Image Segmentation[J].IEEE Transactions on Medical Imaging,2009,28(1):94-105.
[24] BOVENKAMP E,DIJKSTRA J,BOSCH J,et al.Multiagent Segmentation of IVUS images[J].Pattern Recognition,2004,37(4):647-663.
[25] SHARIATPANAHI H F,BATMANGHELICH N,KERMANI A R M,et al.Distributed Behavior-based Multi-agent System for Automatic Segmentation of Brain MR Images[J].IJCNN′06International Joint Conference on Neural Networks,2006:4535-4542.
[26] NEUBERT M,HEROLD H,MEINEL G.Assessing Image Segmentation Quality——Concepts,Methods and Application[M].Berlin:Springer.2008.
[27] JOHNSON B,XIE Z.Unsupervised Image Segmentation Evaluation and Refinement Using a Multi-scale Approach[J].ISPRS Journal of Photogrammetry and Remote Sensing,2011,66(4):473-483.
[28] ESPINDOLA G,CAMARA G,REIS I,et al.Parameter Selection for Region-Growing Image Segmentation Algorithms Using Spatial Autocorrelation [J].International Journal of Remote Sensing,2006,27(14):3035-3040.
[29] ZHANG H,FRITTS J E,GOLDMAN S A.Image Segmentation Evaluation:A Survey of Unsupervised Methods[J].Computer Vision and Image Understanding,2008,110(2):260-280.
猜你喜欢
北京测绘(2022年9期)2022-10-11
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
绿色科技(2021年5期)2021-11-28
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
计算机技术与发展(2020年4期)2020-04-30
金桥(2018年4期)2018-09-26
太空探索(2016年5期)2016-07-12
中国卫生(2014年5期)2014-11-10
时代英语·高三(2014年5期)2014-08-26