
基于PASCO平台的磁悬浮陀螺实验研究
2013-01-11 03:37丁璐周荣朴滕保华吴明和李业凤
物理通报 2013年4期
丁璐 周荣朴 滕保华 吴明和 李业凤
(电子科技大学物理电子学院 四川 成都 610054)
1 引言
在日常生活中,磁悬浮是一个重要现象,而磁悬浮陀螺玩具是其中一个简单应用.它通过探究磁悬浮陀螺悬浮现象,加深对磁悬浮机理的理解.
市面上销售的磁悬浮陀螺由一块内置环状磁铁的陀螺和一块方形的磁性底座组成,附带一个长方形塑料托盘,若干配重(塑料环和铁环)和楔形托片.转动陀螺前,需通过加减环形配重来仔细调节陀螺重量,并利用楔形托片调节底座,使其水平放置.只有当达到一定转速,并且在很小的高度范围内,陀螺才能稳定悬浮.对于在平衡位置附近小范围的摆动,陀螺能自动调节至稳定状态.
国外学者T.B.Jones 等人[1]已经详细分析了陀螺在磁性底盘上方悬浮的原理和悬浮条件,并用实验测得悬浮高度范围.但文中为了得到陀螺稳定悬浮的高度区间,需要测量方形磁体轴线上多个高度处的磁感应强度,使得具体操作具有一定局限性.
本文利用PASCO实验平台的磁感应强度测量传感器,测量了方形永磁体轴线处不同高度上的磁感应强度,根据陀螺稳定悬浮的条件和方形永磁体磁场分布的解析表达式,提出一种确定陀螺悬浮高度的简化方法.利用该方法只需测量方形磁体外部任一点处的磁感应强度,就能得到陀螺稳定悬浮的高度范围,大大简化了实验过程.
2 底座磁感应强度的测量
2.1 PASCO实验平台
PASCO实验平台是一个将计算机数据采集与分析应用于物理实验的系统,运用现代电子技术,采用传感器进行数据采集,电脑进行过程控制和数据处理,尤其是对一些瞬态变化的物理量能做到实时测量,对一些不易观察的物理现象能实现感官展示.根据PASCO实验平台实验附件可组装性强的特征进行新的实验设计与设备研究,实现PASCO实验平台的设计性应用与扩展研究.本实验利用的PASCO平台由三个部分组成:
(1)磁场强度测量传感器Magnetic Field Sensor CI-6520A.
(2)数据采集接口,能将传感器的数据输入计算机,最高采样频率为250 kHz.
(3)数据采集软件,可以连续测试记录扫描路线的磁场强度值,并可将数据导入Excel表格,方便后续数据处理.
2.2 实验测量
本实验所使用的磁悬浮陀螺的底座是边长为10.00 cm,厚度为1.00 cm的方形永磁体.利用PASCO实验仪Magnetic Field Sensor CI-6520A,测量了该永磁体中轴线上磁场分布.在实验过程中,将传感器探头放置在该磁体中轴线位置,每间隔0.5 cm测量一次,测量高度范围为2.00~20.00 cm.实验装置如图1所示.从测量结果(图2)可以看出,随着测量高度的增加,磁场强度逐渐减小,在无穷远处趋于零.

图1 实验装置示意图

测量高度z′/cm
3 简化方法
3.1 磁悬浮陀螺稳定条件
将磁性底座的磁场近似为以中轴线为轴对称分布的磁场,轴向磁感应强度Hz为[1]
(1)
其中,z′为陀螺在平衡位置附近的纵坐标,ρ为平衡位置附近径向微小位移,H0代表在z=0,ρ=0处的磁感应强度.系数α1,α2,…只与轴向分量Hz有关
(2)
不失一般性,设H0>0,忽略高次项,并假设陀螺是磁矩为m的磁偶极子,则磁场H施加给陀螺的力为
fm=μ0m·H
(3)
其中,μ0=4π×10-7H/m,陀螺平衡的条件是
μ0mα1H0=Mg
(4)

假设陀螺自身的磁矩与底座产生的磁场H平行 ,即
(5)
将式(5)代入式(3),得到陀螺受到的力为
(6)
利用磁感应强度的展开式和公式(4),减去平衡条件,得陀螺受到的力为

(7)

(8)
α1<0,α2>0,α12>4α2
(9)

图3 陀螺受力分析示意图
3.2 方形永磁体磁场分布的解析表达式
通过上述分析可知,利用底座磁场分布的解析表达式,即可得出陀螺悬浮的高度范围.将底座简化为沿一个方向均匀充分磁化且达到饱和状态的方形永磁体[2~5],认为磁体内部磁化矢量M为常量、永磁体在宏观上表现为只有表面电流而无体电流存在,外部空间中任意一点的磁场仅由永磁体表面闭合电流环路所激发,则规则的方形底座在轴线处产生磁场的磁感应强度为[2]

(10)

3.3 确定陀螺悬浮高度的简化方法
根据陀螺稳定悬浮的条件和方形永磁体磁场分布的解析表达式,本文提出一种确定陀螺悬浮高度的简化方法.该方法通过只测量规则磁体外一点处的磁感应强度,来确定式(10)中永磁体的等效电流密度J,然后利用式(2)计算α1,α2,4α1-α22,从而确定陀螺悬浮高度.该方法最大优点是省去了测量该磁体轴线上多点处磁感应强度的步骤,对于规则磁性底座使用时简单方便.
对于本实验使用的边长、厚度分别为2a=10.00 cm,h=1.00 cm的方形永磁体磁体,将图2中任一点代表的磁感应强度值代入式(10),求得对应的J为1.65×106A/m2,根据式(10)计算中轴线上离开永磁体上表面不同距离处的磁场强度,如图4所示.可以看出方形永磁体磁场强度解析式在一定误差范围内能够准确反映本实验所用磁性底座磁场分布情况.

测量高度z′/cm
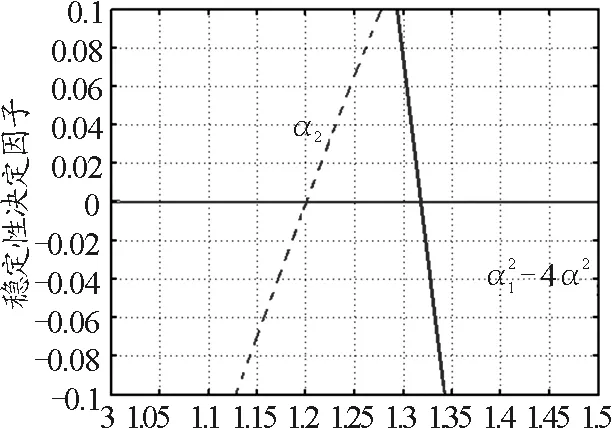
根据方形永磁体轴线处磁场分布式,解析计算了α1,α2,α12-4α2,结果如图5所示,该图为放大后的图像,α1<0的条件已满足,从图中可以看出陀螺稳定悬浮的区间为3.26~3.97 cm.

测量高度z′/cm
测量高度z′/cm
4 比较分析
4.1 利用多点测量方法得到的悬浮高度
对利用PASCO传感器测得的分布曲线(图2)进行多项式拟合,计算α1,α2,4α1-α22,也可得到陀螺能够稳定悬浮的高度区间为3.17~3.51 cm,如图7所示.可以看出,该方法与文献[1]采用的方法相同,适用于各种形状的磁性底座,但是需要测量多点处的磁感应强度,并且为了提高测量准确性还需提供移动平台等机械设备,因此与本文提出的简化方法(只适用于规则形状的磁性底座)相比显得较为复杂 .

测量高度z′/cm
4.2 陀螺实际悬浮高度的实验测量
在陀螺悬浮过程中,拍摄照片,测得实际陀螺稳定区间为3.15~3.69 cm,如图8所示.
通过上述比较可以看出,利用简化方法得到的稳定区间(3.26~3.97 cm),与利用文献[1]采用的方法得到的稳定区间(3.17~3.51 cm),以及实验观察到的稳定区间(3.15~3.69 cm)在一定误差范围内是一致的,从而验证了上述简化方法对规则磁体是可靠的.
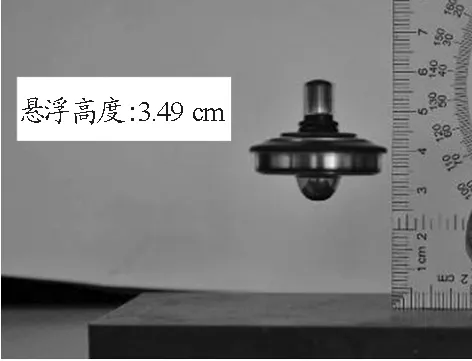
图8 实测陀螺悬浮高度
5 结论
本文利用PASCO实验平台的磁感应强度测量传感器,测量了方形永磁体轴线处不同高度上的磁感应强度.然后根据磁悬浮陀螺稳定悬浮的条件和方形永磁体磁场分布的解析表达式,提出了确定陀螺稳定悬浮高度范围的一种简化方法.通过对陀螺实际悬浮高度区间的实验测量,表明所采用的简化方法能方便确定陀螺悬浮的高度范围.
参考文献
1 T.B.Jones, Masao Washizu, Roger Gans. Simple theory for the Levitron .J.Appl.Phys.82(2) :883~888.,15 July 1997
2 苟晓凡, 杨勇, 郑晓静. 矩形永磁体磁场分布的解析表达式.应用数学和力学, 2004, 15 (3): 271~278
3 王明勇, 郎志坚, 李国军. 方形磁体的空间磁场分布.磁性材料及器件, 2001(6):17~20
4 李晓阳,徐金伟,刘宏娟. 矩形磁体三维磁场空间分布.北京工业大学学报, 2008,34 (1):1~6
5 王瑞凯,左洪福,吕萌. 环形磁铁空间磁场的解析计算与仿真.航空计算技术,20011,41 (5):19~23
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
传感器世界(2022年6期)2022-11-25
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
小哥白尼(趣味科学)(2021年3期)2021-07-16
哈尔滨轴承(2021年4期)2021-03-08
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
小学生导刊(2017年34期)2017-07-09
小学生导刊(低年级)(2016年2期)2016-02-24
