
基于PXI总线的电驱变速箱齿轴耐久测试系统的开发
2013-01-08 03:38:30郁晓瑜
传动技术 2013年4期
郁晓瑜
上海汽车集团股份有限公司技术中心
1 介绍
2008年上汽和上海市政府签署研发军令状,启动IP24项目研发面向批产的插电式油电混合动力车。混合动力总成的研发国内和国际都属于前沿技术,对于关键部件的测试验证无前人可以参照,但随着混合动力汽车的产业化,其相应的测试技术也尤为重要。混合动力试验技术的研究是一项非常重要和意义的技术工作。随着混合动力的产业化进程,对电驱变速箱的要求也越来越高,其必须具备的高功率密度、高转速、高效率、高可靠性的性能。
电驱变速箱齿轴耐久试验是验证电驱变速箱不会过早的因为内部的齿轴失效而无法正常工作的试验。因为项目紧迫,急需要迅速完成这个试验。现有的台架只能完成手动的功能测试,不能进行自动化运行的工况。本文运用NI公司的PXI平台和硬件模块,进行信号的采集、控制和通讯,使用NI的图形化编程软件Labview进行测试顺序的控制、数据的采集和用户界面的编写,配合并行测试方法,达成了灵活的自动化测试系统,快速完成项目上的目标。
2 试验介绍
齿轴耐久试验的目的是为了验证电驱变速箱不会过早因为内部的齿轴等零部件在各种工况下的失效导致功能损坏。
其试验顺序如图1所示。试验共分5个模块(Block),代表试验过程中的5大工况,分别为额定负载、最大扭矩、最大功率、能量回馈和最大转速。每个模块又分2步(Phase)或3步,分别是该工况下的1档、2档或倒档测试。试验共耗时13366分钟,即约222小时。
按照试验规范,采用5%的工况,即每次每步只运行总时间的5%,耗时668.44分钟。若需要完成100%试验,循环运行5%工况20次,即可完成整个试验。
试验标准同时要求整个过程必须安装8个传感器来确保电驱变速箱的安全运行。具体传感器见表1。

图1 试验规范Fig.1 Test Specifications
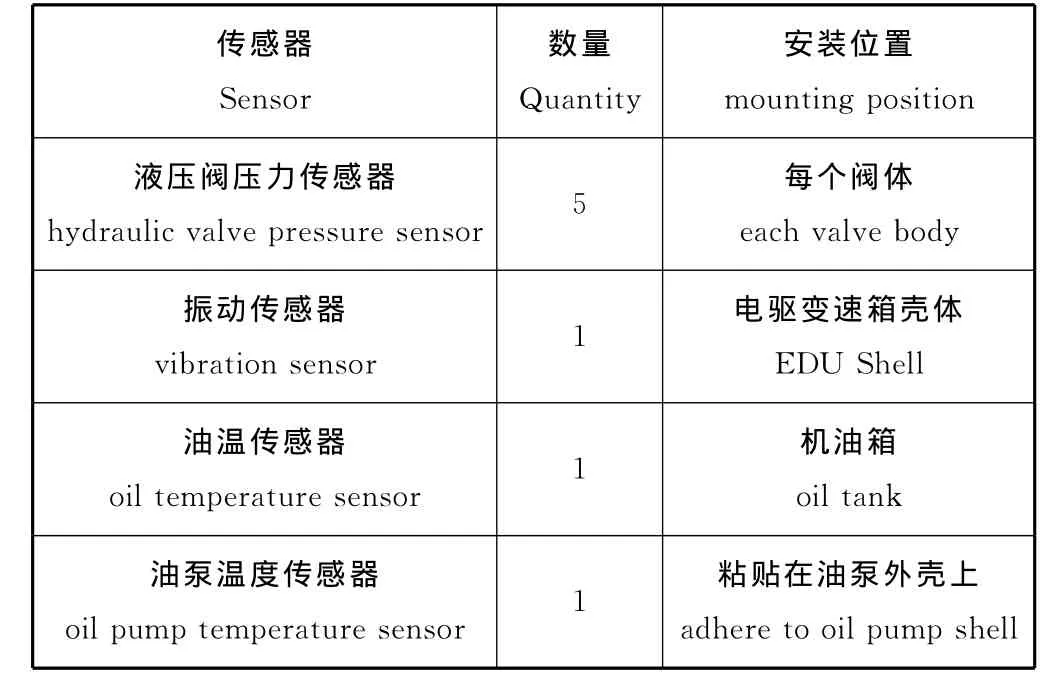
表1 传感器Table1 Sensor
3 台架系统电气架构设计
3.1 系统图设计
根据齿轴的试验标准,需要使用三测功机台架来完成,驱动测功机通过皮带机构连接到电驱变速箱,用来代替传统的发动机。变速箱输出通过法兰和半轴连接到两个输出测功机。输出测功机运行在转速模式,同时驱动测功机、电驱变速箱的ISG电机和TM电机输出扭矩。电池系统由AV900电子负载代替连接到PEB(Power Electric Box)上。如图2所示。
原有常测变速箱台架自带的软件能手动控制驱动测功机和输出测功机,同时具有远程控制的功能,开放了CAN通讯协议。因此,此测试系统通过台架的CAN协议可以直接控制测功机,同时监控测功机重要参数。另外此测试系统,可以运用CCP的通讯协议与混合动力控制器(HCU)通讯,控制和监测控制器内信号,使整个动力系统处在并联模式,使电驱变速箱的ISG电机和TM电机输出扭矩。
3.2 NI硬件选用
本课题所研究的测试系统需要2路高速CAN通讯,需要至少8路的高精度模拟量输入采集通道。考虑到此测试系统需要一个强大的计算器进行大量数据采集和循环控制同步的精确性,因此选择了PXI开发平台,这是因为PXI不仅具有业内最高的总线带宽和最低的传输延迟,而且能在恶劣环境中运行,这对此测试系统安置在台架如此高噪音、高振动和高电磁辐射的环境很有利。为了适应本系统进一步升级和后续模块的嵌入,选择了高性能的8槽机箱。(PXI-1042)控制器则采用内嵌双核2.53 GHZ的PXI-8108以满足测试循环的顺畅执行和数据采集的实时性。PXI-6229M系列16位数据采集板卡作为外围模块提供多达32路具有250KS/s传输速率的通道,足以满足此试验传感器要求。PXI-8013/2作为双端口软件可选控制器局域网络(CAN)PXI接口,其支持的NI-XNET软件可选式接口能够最灵活地进行CAN开发,其板载收发器还很适合高速、低速/容错和单线CAN,足以满足2路高速CAN的通讯要求。
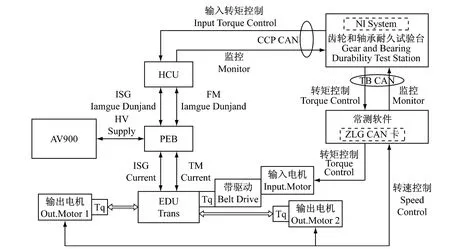
图2 系统图Fig.2 System diagram
4 程序架构设计
4.1 状态机程序架构
按照试验规范,采用5%的工况,即每次每步只运行总时间的5%,若要完成100%试验,循环运行5%工况20次,即可完成整个试验。可见此循环顺序无法单纯的用顺序结构来实现,循环中有多个模块,模块中又有多个步骤,且用户会通过手动输入需要运行的工况,因此可以考虑采用状态机的程序架构。
状态机是在工程应用中使用最多的设计模型。使用状态机,我们可以很容易的实现程序流程图中的判断、分支。
状态机具有4个要素,即现态、条件、动作和次态。现态是指当前所处的条件;条件又称事件,当一个条件被满足,将会触发一个动作,或者执行一次状态迁移;动作是条件满足所执行的动作,动作执行完后可以迁移到新的状态,也可以仍旧保持原状态。动作是不必需的,当条件满足后,也可以不执行任何动作,直接迁移到新的状态;次态为条件满足后要迁往的新状态,
此测试系统的状态机有初始化、模块1、模块2、模块3、模块4、模块5组成,初始状态为INIT,对各种空间和变量进行初始化,完成后自动进入模块,根据界面设置来选择进入任何一个模块和步骤。因此最外面是FOR循环20次,里面是模块选择结构,最里面是步骤选择结构,通过枚举变量来完成结构和结构的连接,即状态和状态间跳转。见下面图3和图4所示。
4.2 CCP CAN通讯介绍
ASAP作为一个国际标准从两个方面对匹配标定系统作了规范:匹配标定系统是怎么样的;怎样建立匹配标定系统。ASAP工作组为了实现对应用系统进行测量、标定和诊断,定义了名为MCD的模型,围绕这个模型建立了3个标准,即ASAP1、ASAP2和ASAP3。(见图5)ASAP1a作为一个可应用于不同平台的协议在ASAP标准之中具有相对的独立性。XCP是一系列基于不同通讯平台的测量标定协议的总称。CCP协议是“XCP on CAN”协议的具体应用。CCP由28个基本命令组成,一次标定过程是由一组按规定顺序发送的基本命令组成。CCP的基本操作模式是由主机发出所有命令,从机根据主机的指示完成相应操作。
在软件环境下,按照命令的定义编写一系列的函数,并编译成动态链接库。然后在状态机的软件中可以按照CCP(ASAP1b)或者ASAP3标准中给出的实现常用功能所需的流程,顺序调用响应命令来实现快速与ECU等控制器的通讯。
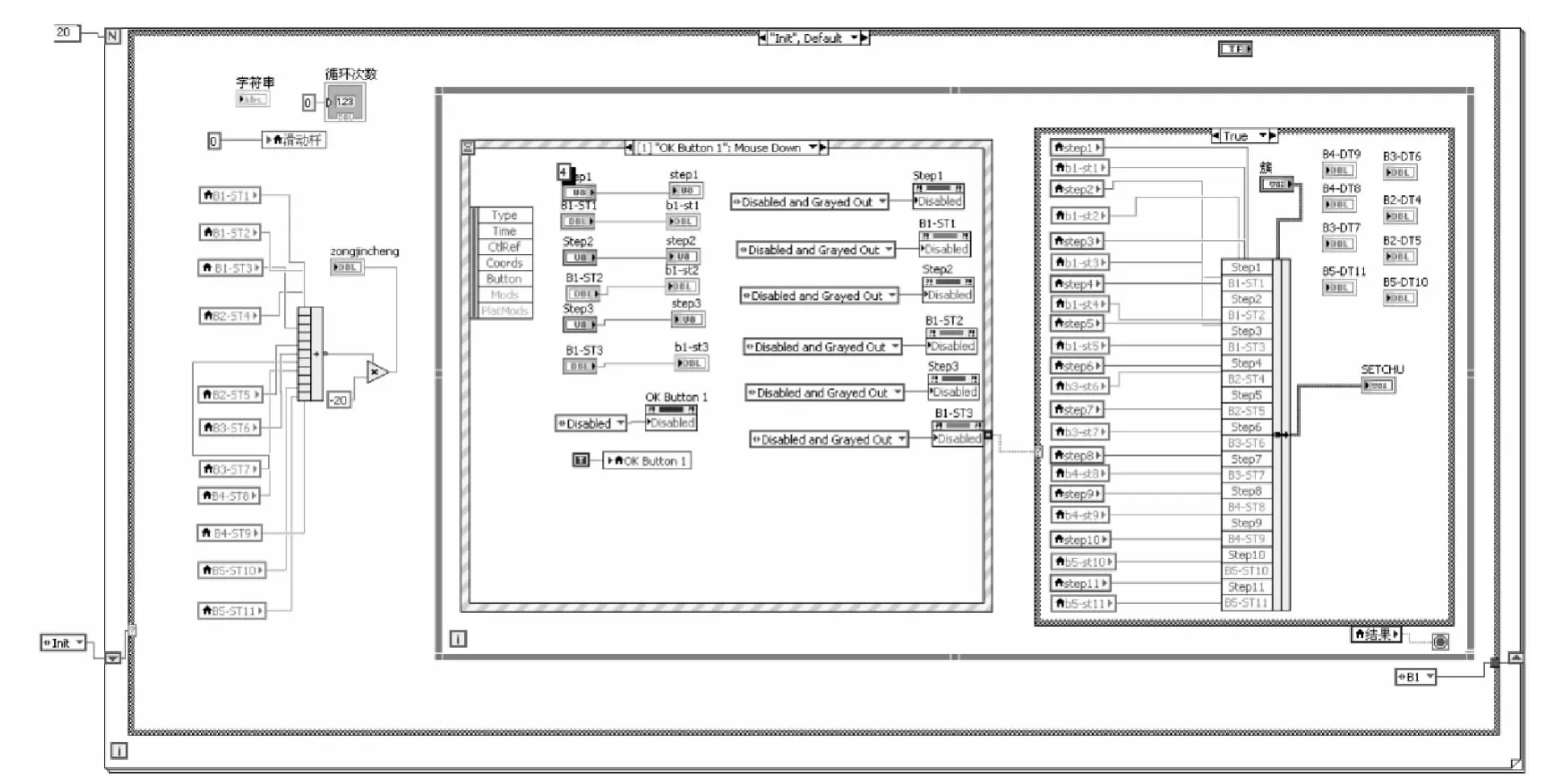
图3 初始化软件框图Fig.3 Initialization software block diagram
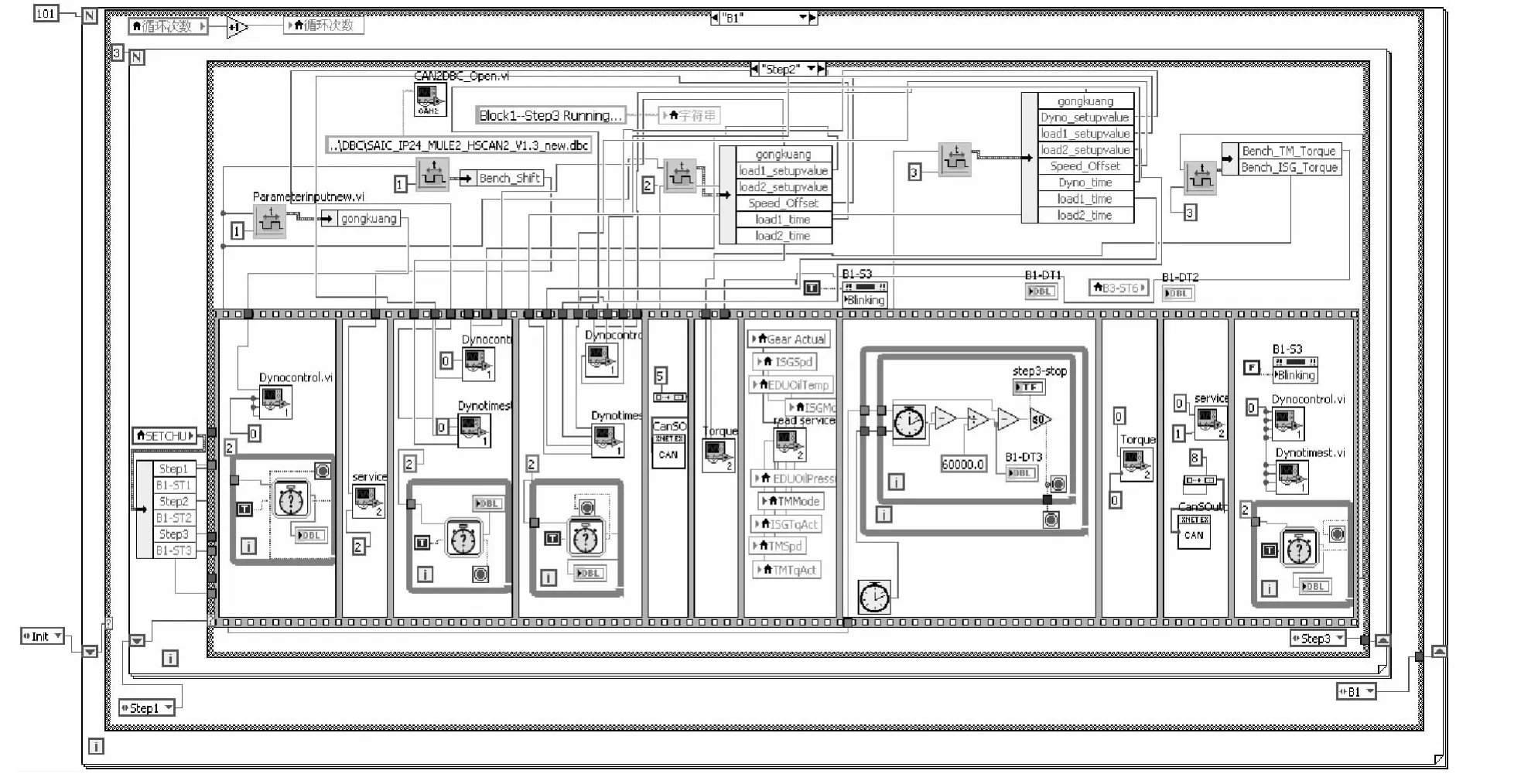
图4 主程序软件框图Fig.4 Main program software block diagram
CCP报文使用CAN数据帧8个字节的数据场,占用两个CAN报文ID标志符(CRO,DTO)。
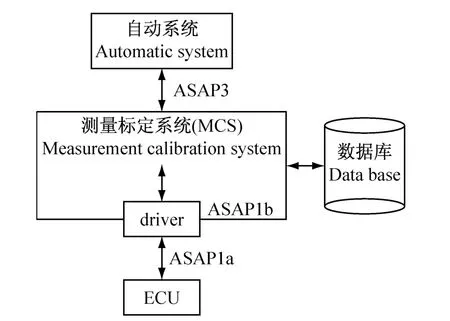
图5 ASAPFig.5 ASAP
CRO:(Command Receive Object)上位机发给ECU的命令报文。
DTO:(Data Transmission Object)ECU发送到上位机的报文。
CRO和DRO报文结构:
CRO:
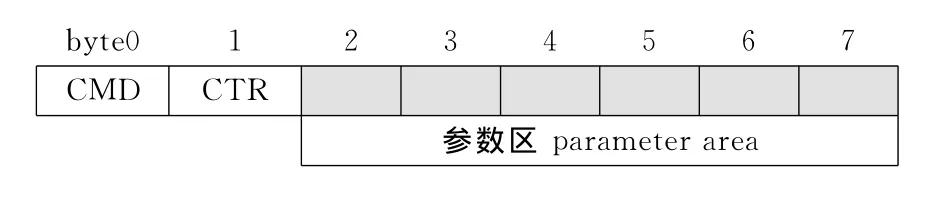
byte0 1 2 3 4 5 6 7 CMD CTR参数区parameter area
CRM,Event Message:

byte0 1 2 3 4 5 6 7 PID ERR CTR数据区data area
DAQ-DTO:

byte0 1 2 3 4 5 6 7 PID数据区data area
CMD是命令代码,CCP规定了28个命令,实现各种不同的功能;CTR是命令计数位,用以确定返回报文的是哪条命令的执行结果;PID是标示DTO的类型;ERR是错误代码。
表2为CCP协议命令介绍:
CCP获取数据的方式,常用的模式为Polling模式即查询模式,由上位机向ECU发送SET_MTA命令设置系统操作的内存地址,上位机每发送一次UPLOAD命令,ECU就返回一个对应区域和长度的数据至上位机。见图6。

图6 Polling模式Fig.6 Polling mode

表2 CCP协议命令Table2 CCP agreement command
根据CCP通讯协议,定出测试系统的CCP控制指令(见图7)和监测指令(见图8)。
4.3 台架远程通讯协议制定
在台架设计初期必须考虑到外部开放接口,制定好远程控制协议对后续集成工作具有重要作用。地址选定要避免与通用汽车DBC定义相同,尽量实现集中控制。实现对台架测功机的模式、转速、扭矩等的控制。
地址1 address 1:

?
地址2 address 2:

Data1 Data2 Data3 Data4 Data5 Data6 Data7 Data8驱动电机转速load motor speed驱动电机扭矩load motor torque驱动电机功率load motor power车速vehicle speed油门开度throttle opening负载电机1转速load motor 1speed负载电机1扭矩load motor 1torque负载电机1功率load motor 1power
地址3 address 3:

Data1 Data2 Data3 Data4负载电机2转速load motor 2speed负载电机2扭矩load motor 2torque负载电机2功率load motor 2power驱动电机状态drive motor condition Data5 Data6 Data7 Data8负载电机1状态load motor 1condition负载电机2状态load motor 2condition温控系统温度temperature system control台架故障bench failure

图7 CCP控制指令Fig.7 CCP control command
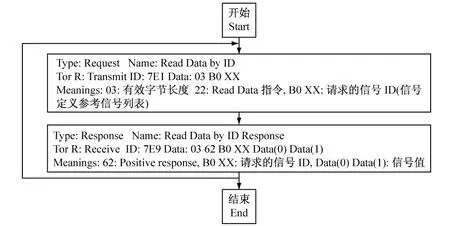
图8 CCP监测指令Fig.8 CCP monitoring command
5 模拟实车信号
由于台架使用的是真实的混合动力控制器(HCU)和电力电子箱(PEB),因此实车的一些信号必须模拟才能使整个系统正常工作。模拟电池管理系统(BMS)给HCU和PEB发送信号;模拟ABS系统给HCU发送实时车速信号,才能使HCU进入并联模式。
6 软件及用户界面
图9为主控制界面,左面为设置界面,用户可以任意选择需要运行的工况,也可以将某步骤Disable,可以任意设置每步骤需要运行的时间。左下方为系统信息显示栏,可以显示每步运行的状态,是否有报错。右面为监控界面,实时监控CAN上的主要参数和信息,右下方为急停、故障复位、停车、系统上电、系统下电按钮和进度条显示。
图10为辅助监控界面,主要采集8路传感器参数并实时显示,同时监控CAN上的变量,同时选择参数作为三级报警,增加了系统的安全性,保护了被试件的安全。

图9 主控制界面Fig.9 Main control interface
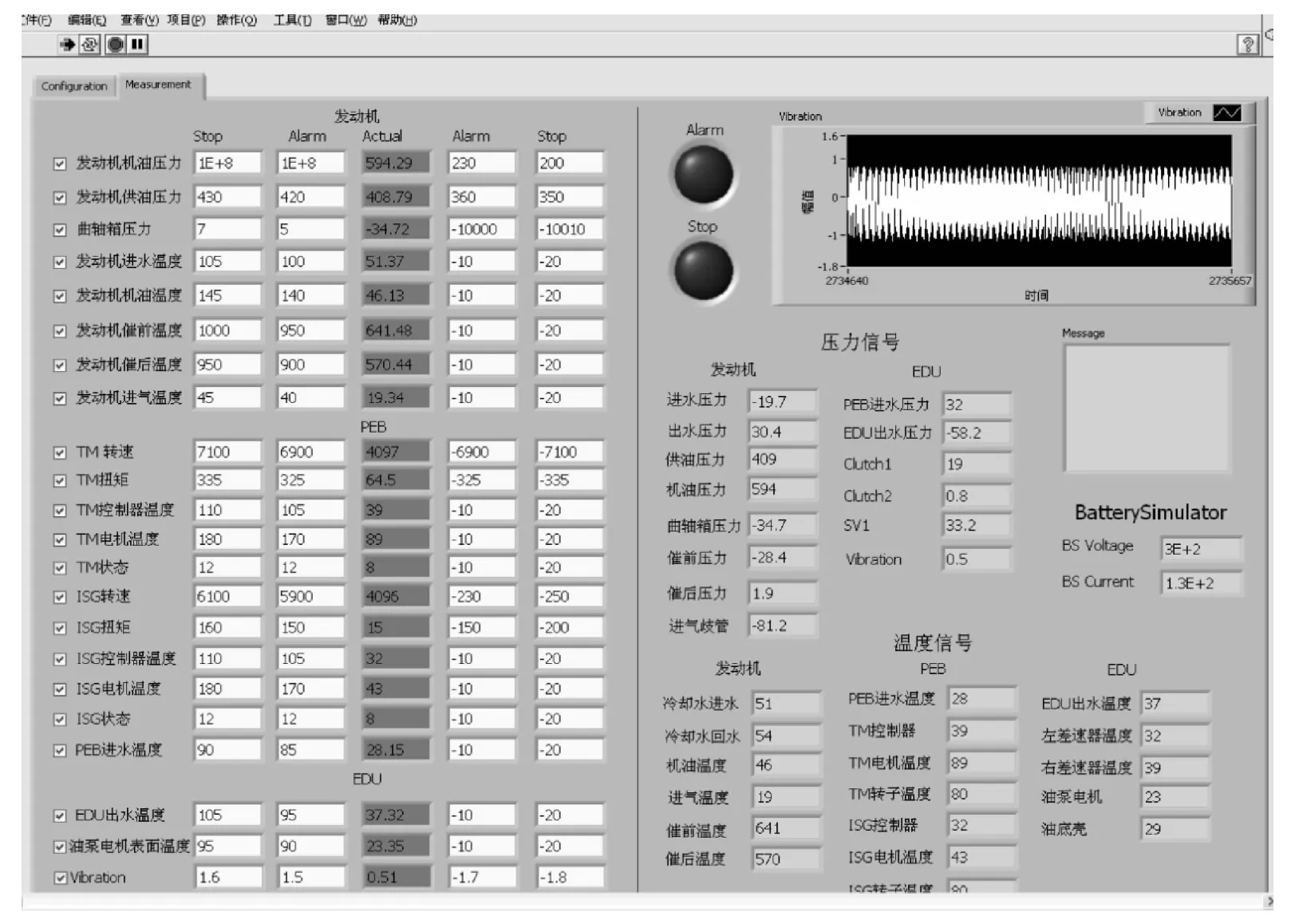
图10 监控界面Fig.10 Monitoring interface
7 总结与展望
利用NI公司的虚拟仪器Labview2010和PXI平台以及采用CCP协议,在较短时间内开发完成了一套电驱变速箱齿轴耐久的试验系统,比采用其他传统软件开发平台缩短了至少1倍以上的开发时间,该平台的成功开发,使得混合动力电驱变速箱在不作任何软件更改上完成了齿轴耐久试验,试验结果迅速能为设计工程师作为图纸锁定和方案修改的参考。因而,在实际测试系统开发过程中,必须节约成本和缩短开发时间,同时降低事故发生的概率。
[1] 陈树学,刘萱等.LabView宝典[M].电子工业出版社,2010.
[2] 伍少初,曹建国.汽车可靠性数据的采集设计与应用[J].第11卷第4期.
[3] 岂兴明,周建兴等.LABVIEW8.2中文版入门与典型实例[M].人民邮电出版社,2008.
[4] 阮奇桢.我和LabVIEW:一个NI工程师的十年编程经验[M].2009.
[5] 林静.LabVIEW虚拟仪器程序设计从入门到精通[M].人民邮电出版社,2010.
[6] 杨高科.LabVIEW虚拟仪器项目开发与管理[M].机械工业出版社,2010.
[7] 陈锡辉,张银鸿.LabVIEW 8.20程序设计从入门到精通[M].2007.
[8] 陈振辉.基于CCP协议的混合动力车VCU标定系统开发[J].微计算机信息,2007.
猜你喜欢
汽车实用技术(2022年16期)2022-08-31 07:15:44
汽车实用技术(2022年7期)2022-04-20 11:45:04
装备制造技术(2021年4期)2021-08-05 07:39:22
上海大中型电机(2021年2期)2021-07-21 03:01:34
上海大中型电机(2021年1期)2021-06-09 09:12:02
装备制造技术(2020年11期)2021-01-26 00:39:04
设备管理与维修(2016年7期)2016-04-09 03:17:19
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:08
汽车维修与保养(2015年6期)2015-04-17 03:31:48
汽车维修与保养(2015年6期)2015-04-17 03:31:46
