
太阳电池阵寄生电容影响分析与对策
2012-12-29 04:13陈琦赵长江
航天器工程 2012年3期
陈琦 赵长江
(北京空间飞行器总体设计部,北京 100094)
1 引言
目前已发射的绝大多数航天器,其电源系统都使用了太阳电池阵作为能源产生装置。太阳电池阵通过一定数量的太阳电池片串、并联组成,太阳电池片采用的材料也从硅(Si)发展到光电转换效率更高的砷化镓(GaAs)。与此同时,国际上电源控制产品也在迅速发展,如欧洲泰雷兹-阿莱尼亚(Thalas Alenia)公司的SB4000平台电源控制器,其单级分流电路的分流能力为7A,新一代电源控制器的单级分流能力为16.5A,阿斯特留姆(Astrium)公司的PSR100电源控制器,其单级电路的分流能力达到了20.5A。
随着国内航天器用户功率需求大幅增加,大功率电源控制器研制需求较为迫切,要求电源控制电路的分流能力由目前几安培量级提高至十几安培。太阳电池阵输出功率增大,使太阳电池串、并联数增加,从而直接导致太阳电池阵的寄生电容增大[1-2]。由于寄生电容的存在,寄生电容瞬间放电产生较大峰值电流,会对分流管产生冲击,甚至导致损坏,并且使电源控制器的分流调节电路出现两级同时调整的过调制状态。过调制会导致母线纹波幅度和频率增大,也会导致电源控制器热耗增加,影响供电母线的稳定性[3-5]。
本文给出了几种太阳电池阵寄生电容典型测量值;分析了太阳电池阵寄生电容瞬间放电及响应滞后分流控制过调制的影响;提出的峰值电流抑制电路可使放电峰值电流被抑制在可接受的范围内,降低分流管过流击穿风险,而相位超前电路(PAC)通过动态调节分流电路滞环宽度,解决两级分流同时处于调整状态的过调制问题,提高电源系统的稳定性;通过仿真验证了两种电路设计的合理性,可为国内大功率电源控制器研制、升级提供参考。
2 寄生电容影响分析
太阳电池片的基本结构是P-N 结,电容效应是P-N 结的基本特性。P-N 结有空间电荷区,加正向电压,势垒区电场会随所加电压而变化,引起势垒区宽度变化,P 区和N 区电子和空穴发生扩散和漂移。也就是说,外加电压变化会引起电子和空穴在势垒区的存入和取出,导致势垒区空间电荷数量随外加电压变化而变化,这就是势垒电容。扩散区中电荷随外加偏压变化而变化所产生的电荷存储效应等效为电容,称为扩散电容。势垒电容和扩散电容共同组成太阳电池阵的寄生电容,是可变电容。表1给出了太阳电池阵寄生电容典型值[2]。

表1 太阳电池阵寄生电容典型值Table 1 Typical values of parasitic capacitance of solar array
在以太阳电池阵作为能源产生装置的航天器电源系统中,电源控制器主要对太阳电池阵的输出功率进行分流稳压调节,分流稳压调节方式分为线性调节和开关调节,目前大多数航天器电源系统采用开关调节技术,开关调节技术又可细分为限频顺序开关分流调节(S3R)和脉宽调制(PWM)技术。本文以限频S3R 调节技术为例,分析太阳电池阵寄生电容对电源控制器产生的影响。一级限频S3R 分流稳压调节技术的原理框图如图1 所示,其中SA为太阳电池阵,CJ为太阳电池阵寄生电容,D1为隔离二极管,M1为分流管,MEA 为母线误差电压信号,Vref为参考电压,CO为母线滤波电容,Vbus为母线电压。

图1 单级分流电路原理框图Fig.1 Principle block of single-stage shunt circuit
分流电路有3种工作状态:供母线状态,M1分流管截至;分流状态,M1 分流管导通;调整状态,M1分流管工作在开关状态。假设电源控制器中有N级分流电路,分流电路的工作状态受MEA 控制,如果有M级工作在分流状态,那么有(N-M-1)级工作在供母线状态,有1级工作在调整状态。
太阳电池阵寄生电容CJ对电源控制器产生的影响主要体现在两方面:一是尖峰电流影响,当分流管M1由截至到导通时,寄生电容CJ瞬间放电,会产生很大的瞬间电流,给分流管带来过流击穿风险[6-7];二是滞后影响,当分流电路受MEA 信号控制需要由分流转为供电时,由于寄生电容CJ的存在,太阳电池阵的功率不能迅速响应控制信号向母线供电,即响应滞后[8-9],只有当寄生电容CJ的电压充电至母线电压时,太阳电池阵的功率才能向母线供电。
3 寄生电容影响的解决措施
3.1 尖峰电流影响的解决措施
由于太阳电池阵寄生电容CJ的存在(见图1),在分流管导通瞬间,尖峰电流会远远大于分流电路的分流能力,给分流管带来过流击穿风险。峰值电流值可通过电容的伏-安特性进行计算。

式中:Ⅰ为峰值电流。
由式(1)可得

式中:Δt为分流管导通时间。
分流管导通时间Δt一般为1μs左右,根据式(2),以三结砷化镓太阳电池阵28V 母线电压为例,可计算出太阳电池阵不同电流下分流电路的峰值电流(CJ分别取1 320nF、3 000nF、3 800nF),如图2所示。由图2可知,峰值电流远大于太阳电池阵输出电流,如果不加以抑制,还要保证分流管在峰值电流下不被损坏,就要选取载流能力较大的分流管,这样就会造成电源控制器的体积、质量和成本的增加,而且,当峰值电流大到一定程度时,将无法找到满足要求的分流管,因此,要解决过流问题,就要增加峰值电流抑制电路(见图3),将峰值电流抑制在可接受的范围内。

图2 峰值电流计算值统计图Fig.2 Statistical graph of calculated peak current values

图3 峰值电流抑制电路Fig.3 Peak current suppression circuit
峰值电流抑制电路利用场效应分流管的栅极驱动电压与漏、源极流过的电流有对应关系的特性,即栅极电压越高,漏、源极流过的电流越大,反之,电流减小。当图3中驱动信号由低电平变为高电平时,电源电压Vdd通过电阻Rd和Ra作用到分流管M2的栅极;当电压上升到M2 导通阈值时,M2 的漏、源极开始有电流流过,寄生电容开始放电;当电流达到设定值时,电阻Rf两端电压升高到使三极管Q3导通,使M2栅极电压不再升高,同时M2的漏、源极流过电流也不再增大,寄生电容通过一个可接受的电流值进行放电;当放电结束后,流过M2的电流为太阳电池阵的实际电流,电流减小,Rf两端电压降低,三极管Q3 截止,M2 栅极电压上升到电压Vdd,分流管M2完成导通过程。
峰值电流抑制电路的工作过程如图4所示。在t1时刻,栅极电压VGS开始上升,漏极电流ⅠD开始上升;当上升到设定值ⅠLIM时,VGS停止上升,ⅠD也维持在设定值ⅠLIM;直到t2时刻,寄生电容以电流ⅠLIM放电结束,ⅠD变为太阳电池阵电流ⅠSA,VGS开始上升到Vdd(+12V),完成分流管M2由截止到导通过程;寄生电容的放电电流被抑制在设定值ⅠLIM,降低了分流管M2的过流击穿风险,寄生电容最大放电电流ⅠLIM大小可通过电路参数设定。

图4 峰值抑制电路工作时序Fig.4 Work sequence of peak suppression circuit
3.2 滞后影响的解决措施
由于太阳电池阵寄生电容CJ的存在(见图1),当MEA 控制分流管M1由分流导通状态向截止状态转换时,太阳电池阵的功率不能迅速响应控制信号向母线供电;只有当寄生电容CJ的电压充电至母线电压时,太阳电池阵的功率才能向母线供电。在此期间,母线电压会继续下降,当下降到一定程度时,MEA 信号将控制下一级分流电路由分流状态转换到供母线状态,造成分流控制电路的过调制。
图5为带有寄生电容滞后影响的母线电压曲线。图中红色曲线为无寄生电容影响、一级太阳电池阵SAi处在调整工作状态时的母线电压波形图;紫色虚线为由于寄生电容影响导致两级太阳电池阵SAi与SAj同时处于调整工作状态时的母线电压波形图。INCTR为分流管开通关断控制信号。当母线电压下降时,MEA电压也随之下降,当MEA 电压下降到低电平VL时,INCTR信号由低电平转为高电平,对应的分流管由分流导通状态转换到截止工作状态;当母线电压升高时,MEA电压也随之升高,当MEA电压升高到高电平VH时,INCTR信号由高电平转为低电平,对应的分流管由截止状态转换到分流导通工作状态。
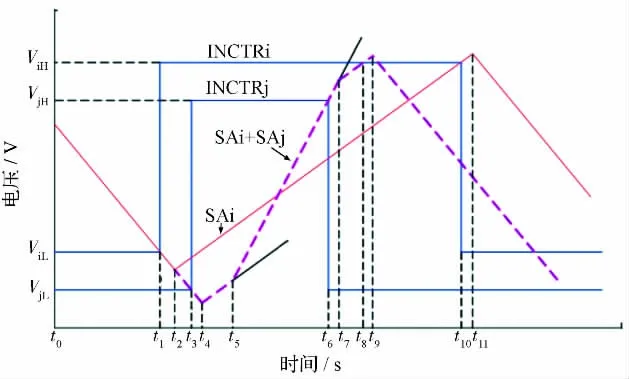
图5 带有寄生电容滞后影响的母线电压Fig.5 Curve of main bus voltage influenced by parasitic capacitance delay
在寄生电容导致两级同时调整的过调节状态母线电压波形图(紫色虚线)中,一个周期的控制过程如下:当母线电压下降到电压阈值ViL时(t1时刻),控制信号INCTRi由低电平变到高电平,由于分流管动作延迟(t2-t1),在t2时刻太阳电池阵SAi对应的分流管已经断开,太阳电池阵SAi输出电流开始为其寄生电容充电,母线电压继续下降;当下降到电压阈值VjL时(t3时刻),控制信号INCTRj由低电平变到高电平,经过相同的延迟(t2-t1)后,太阳电池阵SAj对应的分流管断开,太阳电池阵SAj输出电流开始为其寄生电容充电;到达t4时刻,太阳电池阵SAi寄生电容充电至母线电压,输出电流开始向母线供电,母线电压开始上升;在t5时刻,经过相同的延迟后,太阳电池阵SAj寄生电容也充电至母线电压,太阳电池阵SAi和SAj输出电流同时向母线供电,母线电压上升速率开始变大;到达t6时刻,母线电压上升到阈值VjH,控制信号INCTRj由高电平变为低电平,并经过一定的开关动作延迟到达t7时刻,太阳电池阵SAj对应的分流管分流导通,此时只有太阳电池阵SAi向母线供电,母线电压上升速率开始变小;在t8时刻,当母线电压上升到阈值ViH时,控制信号INCTRi由高电平变为低电平,经过一定的开关动作延迟到达t9时刻,太阳电池阵SAi对应的分流管分流导通,母线电压开始下降。
通过上述分析可知,从控制信号发出分流管关断命令到太阳电池阵输出功率向母线供电,存在延迟(t4-t1),它由开关动作延迟(t2-t1)和寄生电容充电延迟(t4-t2)共同组成。开关动作延迟由电路设计决定,寄生电容充电延迟可通过式(3)计算。

式中:τc-delay为充电延迟时间。
电路开关动作延迟和寄生电容充电延迟,导致分流电路出现过调制状态,而这些延迟是固有存在的,要想解决延迟造成的过调制问题,从理论上讲,有几种方法。一是通过增加母线输出滤波电容容量,使母线电压的下降速率变缓,母线电压在经过延迟后仍不能下降到下一级分流电路截止的阈值,从而可以保证分流电路不会出现过调制现象。寄生电容越大,需要的母线滤波电容就越大,而滤波电容增大,会导致电源控制器的体积、质量和成本增加,但是当寄生电容大到一定程度时,所需的母线滤波电容值会超过相关标准所规定的最大允许值。二是增大相邻两级分流电路控制电压阈值区间。由图5可知,增加ViL和VjL的电压区间,使由于延迟造成的母线下降幅度不能到达下一级的电压阈值VjL,同样可以解决分流电路的过调制问题,但是由于MEA 电压区间范围有限,当航天器功率较大,需要分流电路级数较多时,有限的阈值区间无法满足设计要求。三是增加相应的控制电路,使处于调整状态的分流电路滞环变窄,增大与下一级分流电路电压阈值之间的电压差,使由于延迟造成的母线电压下降幅度不能到达下一级电路的电压阈值,电路如图6所示。

图6 具有阈值调节功能的分流电路Fig.6 Shunt circuit with valve value regulation
图6中虚线框内为PAC电路,它可以动态调节处于调整状态的分流电路滞环阈值。当电路处于稳态时,分流管M3处于长期导通或长期截止状态,电容CP相当于开路,控制电路稳态滞环电压ΔVW可由式(4)计算得到;当分流电路处于开关调整状态时,电容CP相当于短路,控制电路动态滞环电压ΔVD可通过式(5)计算得到。
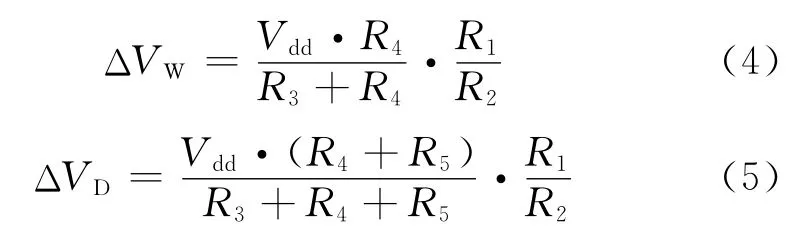
式中:R1~R5分别为图6中的电阻值。
通过合适的电路参数设计,可以实现ΔVW>ΔVD,减小处于调整状态的动态滞环电压,从而增大与下一级分流电路阈值之间的电压差,使由于延迟造成的母线电压下降幅度不能到达下一级电路的电压阈值。如图7所示,红色曲线为有PAC控制电路的母线电压波形图,紫色虚线为无PAC控制电路的母线电压波形图。由图中可看出:太阳电池阵SAi对应的分流电路处于调整状态时,PAC 电路控制分流电路滞环电压从稳态的(ViH-ViL)减小到动态的(ViH(D)-ViL(D));从t1时 刻 开 始,控 制 信 号INTCRi(D)已由低电平转为高电平,经过开关动作延迟和寄生电容充电延迟后,太阳电池阵SAi在t3时刻开始向母线供电,母线电压上升,幅度没有达到下一级分流电路的阈值VjL,因此不会出现两级电路同时处于调整的过调节状态。

图7 采用相位超前电路的母线电压曲线Fig.7 Voltage curve of bus adopting phase anticipator circuit
3.3 仿真验证
为验证抑制电路的有效性和分析的正确性,按照图3分别以电流分流7A、16A 进行仿真。采用峰值抑制电路前后,寄生电容造成的峰值电流分别由35.79A、86.34A 减小到17.51A、34.06A,仿真结果如图8所示。结果表明:峰值电流抑制电路能够将寄生电容的放电电流抑制在设计的范围内,措施有效,效果明显。
对寄生电容的滞后影响进行了电路仿真,仿真波形图如图9所示。根据仿真结果可以看出:寄生电容导致母线电压纹波幅度由0.31V 增加到0.44V,频率由631.2Hz增加到3 446.0Hz,验证了分析结果的正确性。
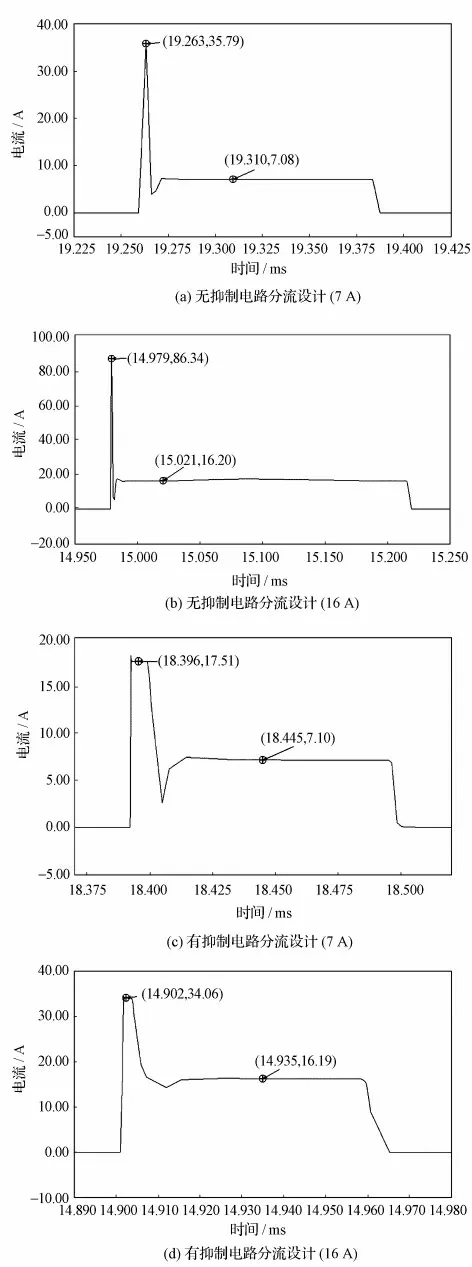
图8 采用峰值抑制电路前后分流电流仿真结果比较Fig.8 Comparison of simulation results between adopting and not adopting peak suppression circuit
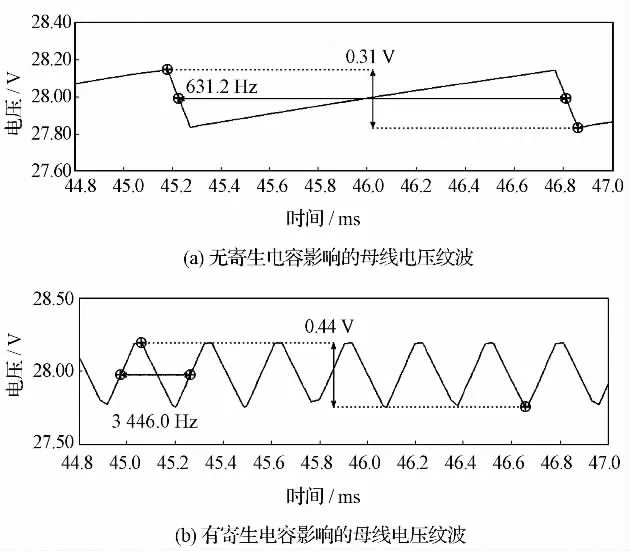
图9 母线电压仿真结果Fig.9 Simulation results of bus voltage
为验证PAC 电路的有效性和分析结果的正确性,对PAC电路进行了仿真,仿真波形图如图10所示。通过仿真结果可以看出:PAC 电路有效地解决了电路开关动作延迟和寄生电容充电延迟造成的两级分流电路同时处于调整状态的过调制问题,电路设计合理、有效,分析结果正确。

图10 采用相位超前电路的母线电压仿真结果Fig.10 Simulation results of voltage of bus adopting phase anticipator circuit
4 结束语
太阳电池阵寄生电容对电源控制器产生的主要影响,表现为分流管导通瞬间产生峰值电流时分流管过流问题和充电延迟导致过调制问题。本文通过对上述问题进行原理分析,提出了峰值抑制和相位超前的设计方法,并对这两种电路设计进行了仿真分析。仿真结果表明:峰值电流抑制电路能够解决寄生电容瞬间放电过流问题,峰值电流被抑制在可接受的范围内,降低了分流管过流击穿风险。PAC电路通过动态调节分流电路滞环宽度,能够有效解决两级同时处于调整状态的过调制问题,降低了电源控制器分流电路的热耗,提高了系统的稳定性。
(References)
[1]Blok R,Berg E,Slootweg D.Solay cell capacitance measurement[C]//Proceedings of the 6thEuropean Space Power Conference.Paris:ESA,2002:597-602
[2]Rueda P,Lisbona E F.Multi-junction Ga/As solar cell capacitance and its impact upon solar array regulators[C]//Proceedings of the 6thEuropean Space Power Conference.Paris:ESA,2002:29-34
[3]Liegeois B G.Switch shunt regulator and power supply arrangement using same for spacecraft applications:US,6979986B2[P].2005-12-27
[4]Perol P.Another look at the sequential switching shunt regulator[C]//Proceedings of the 5thEuropean Space Power Conference.Paris:ESA,1998:79-84
[5]Delepaut C.S3Rstability margins and design guidelines[C]//Proceedings of the 8thEuropean Space Power Conference.Paris:ESA,2008
[6]Garrigós A,Blanes J M,Carrasco J A,et al.Influence of the parasitic solar array capacitance in the sequential switching shunt series regulator[C]//Proceedings of the 13thIEEE Mediterranean Electrotechnical Conference.New York:IEEE,2006:1198-1201
[7]Delepaut C,Martin M.Current limitation techniques in a S3Rpower cell[C]//Proceedings of the 3thEuropean Space Power Conference.Paris:ESA,1993:61-66
[8]Blanes J M,Garrigós A,Carrasco J A,et al.S3Roptimization for high parasitic capacitance solar arrays[C]//Proceedings of the 8thEuropean Space Power Conference.Paris:ESA,2008
[9]Ebale G,Lamantia A,La B M.Power control system for the AGILE satellite[C]//Proceedings of the 7thEuropean Space Power Conference.Paris:ESA,2005
猜你喜欢
临床神经外科杂志(2022年7期)2022-11-14
复旦学报(医学版)(2022年5期)2022-10-20
北京航空航天大学学报(2021年7期)2021-08-13
科技信息·学术版(2021年7期)2021-01-10
煤矿机电(2020年5期)2020-11-02
上海航天(2020年3期)2020-07-01
课程教育研究·学法教法研究(2018年20期)2018-08-11
装备环境工程(2018年7期)2018-08-01
中南医学科学杂志(2018年2期)2018-06-04
北京航空航天大学学报(2017年7期)2017-11-24
