
基于SPOT5图像的泥石流自动提取方法
2012-12-27 06:40:14杨树文李轶鲲
自然资源遥感 2012年3期
谢 飞,杨树文,李轶鲲,刘 涛
(兰州交通大学数理与软件工程学院,兰州 730070)
基于SPOT5图像的泥石流自动提取方法
谢 飞,杨树文,李轶鲲,刘 涛
(兰州交通大学数理与软件工程学院,兰州 730070)
在前人研究基础上,提出了一种基于SPOT5图像和DEM数据自动提取泥石流的方法。首先利用归一化差值植被指数(NDVI)、归一化差值土壤亮度指数(NDSI)和图像经主成分变换得到的第一主成分(PC1)等3种遥感指数获取新的主成分变换图像,进而利用阈值自动选取算法提取包含泥石流的裸地信息;然后基于1∶10000的DEM数据,利用改进的沟谷中心线提取算法提取沟谷中心线,并利用数学形态学滤波算法生成沟谷范围;最后将提取的疑似泥石流图斑与沟谷范围匹配,并对矢量化后的结果进行面积、坡度和顺坡性等筛选,得到泥石流或潜在泥石流信息。实验表明,本文构建的泥石流提取模型具有较高的提取精度和效率。
泥石流;SPOT5;DEM;自动提取
0 引言
泥石流是严重威胁山区及山前地区居民安全和工程建设的一种地质灾害[1]。2008年汶川地震后引发的次生泥石流地质灾害,对山区城镇、村庄、道路交通、水利水电工程和通讯基础设施等造成严重破坏,给灾区抗震救灾和灾后重建带来了巨大困难。2010年舟曲县突发的大规模泥石流也造成了重大的生命财产损失[2]。如何准确、快速地获取泥石流信息及进行泥石流预测和防治已成为近年来很多学者和相关人员研究的重点。
目前,对基于遥感技术的泥石流调查、预防和治理等方法的研究已经取得了较大进展。如王一川等[3]提出基于DEM自动提取泥石流沟谷边缘线的算法,能够较准确地提取出泥石流边缘线;白志勇[4]利用SPOT和TM数据融合图像研究泥石流;苏凤环等[5]研究了汶川地震山地灾害的遥感快速提取方法,对大规模泥石流滑坡提取效果较好;唐川等[6]对汶川震区北川县城泥石流源地特征进行了遥感动态分析;唐小明等[7]研究了基于虚拟GIS和空间分析的小流域泥石流地质灾害遥感解译;潘仲仁等[8]研究了遥感技术在成昆铁路泥石流沟调查中的应用。
上述研究和应用虽然都取得了一定的成果,但是主要存在2个问题:①提取泥石流的方法过于单一,如仅提取泥石流沟谷边缘线,其提取结果中并不一定都是泥石流通道;②自动化程度不够,很多都是通过人工目视解译提取。因此,本文基于SPOT5图像,通过遥感方法对本底值指数的计算和泥石流沟谷中心线的提取,构建了泥石流遥感自动提取模型,有效地提取了已发生泥石流和潜在泥石流的信息,取得了较好的成果。
1 遥感图像本底值特征
自然环境未受人类活动影响的最初本来面貌的物质组成量被称为环境本底值[9],但在人类活动的长期影响下,当前能够反映自然环境的本底值变得难以获取。因此,研究自然环境的本底值主要是研究其背景值和基线值(总的来说,都可以统称为“本底值”)。遥感技术利用传感器收集地物反射和发射的电磁波来获取各种地物的信息。由于各种地物的物质成分和组织结构不同,所获取的地物信息也有所差异,正是根据这些差异才能利用各种方法将不同地物区分开来,因此遥感已经成为获取地物本底值的一种有效手段和方式。
目前,能够反映地物要素本底值信息的因子有很多,包括植被指数、土壤亮度指数、湿度指数、热度指数、水体指数、气象指数、缨帽变换指数、经主成分变换得到的第一主成分以及地形因子等[10–12]。在众多因子中,本文通过对泥石流的影像特征、地形特征和各种形成条件的对比,经过反复试验,发现运用归一化差值植被指数(normalize difference vegetation index,NDVI)、归一化差值土壤亮度指数(normalize difference soil index,NDSI)和图像经主成分变换得到的第一主成分(PC1)等3个因子能够较好地反映泥石流的遥感图像本底值信息。因此本文选用上述3个指数作为泥石流遥感本底值信息的增强型因子,并以DEM作为辅助型因子来提取泥石流信息。
1.1 植被指数
从发育过程来看,泥石流主要发育于山坡或者山沟中,发育中的泥石流表面植被覆盖差,在图像中主要呈浅色调,在SPOT5图像中一般表现为较亮的图斑,与周围植被发育较好的区域有较明显的反差。因此在泥石流自动提取中,去除植被是非常关键的一个步骤,根据SPOT5图像和研究区的特征,选择合适的植被指数进行去植被处理是非常重要的。
目前,使用最多的植被指数有归一化差值植被指数(NDVI)和修正的土壤调节植被指数(modified soil adjustment vegetation index,MSAVI)。NDVI是Rouse等[13]在1973年提出的,是目前最常用的植被指数,能够较有效地反映植被信息,其针对SPOT5图像的计算公式为

式中:NIR为近红外波段的亮度值;RED为红波段的亮度值。
NDVI的计算结果如图1(a)所示,图中白色和灰白色图斑代表植被发育的地区,黑色和灰黑色图班代表没有植被或植被不发育的地区。
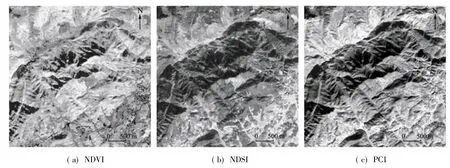
图1 SPOT5图像本底值指数计算结果Fig.1 Index calculation results of the background value of SPOT5 image
1.2 土壤亮度指数
发育中的泥石流主要是裸露的土壤和植被稀少的地表,在SPOT5图像中的光谱特征主要表现为较亮的图斑。为了将其与周围地物区分开来,选用土壤亮度指数作为一个可选指数,常用的土壤亮度指数有归一化差值土壤亮度指数(NDSI)和基于缨帽变换(tasseled cap transformation)的土壤亮度指数(brightness index,BI)等。本文经过反复研究发现,NDSI能够很好地反映泥石流在SPOT5图像中的光谱特征,其计算公式为

式中GREEN为绿波段的亮度值。
NDSI的计算结果如图1(b)所示,图中白色和灰白色图斑代表裸露土壤和植被稀少土壤的地区,其亮度值比较高。
1.3 主成分变换
由于多波段数据经常是高度相关的,主成分变换通过坐标轴旋转使数据的方差达到最大,生成互不相关的波段,从而达到消除噪声和减少数据集维数的目的。SPOT5图像的4个波段从不同的光谱特征和空间特征反映了不同地物信息之间的区别与联系,并且其主成分变换后的第一主成分包含了90%以上的地物信息,因此选用主成分变换提取的第一主成分(PC1)作为一个遥感指数,其能够较好地反映泥石流的遥感图像本底值。PC1的计算结果如图1(c)所示,图中各类地物的边界更为清晰。
2 遥感自动提取关键技术
2.1 沟谷中心线提取
王一川等[3]提出过一种基于DEM的沟谷中心线提取算法,该算法从数学形态学的角度出发,利用移动窗口(3×3或者5×5)在DEM上移动进行沟谷点的判断,最终提取出沟谷中心线。图2为3×3移动窗口示意图。
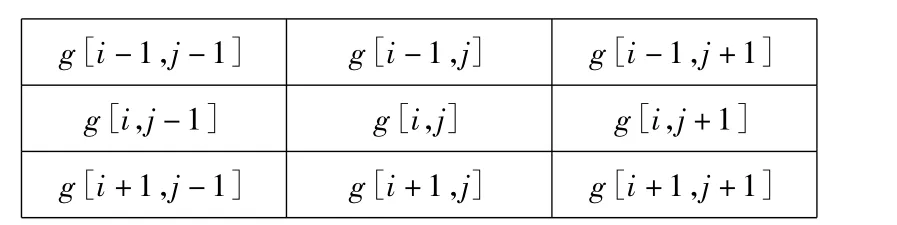
图2 3×3移动窗口Fig.2 3 ×3 moving window
其判断条件为:
1)若(g[i,j- 1]- g[i,j])(g[i,j+1]-g[i,j]) >0,且(g[i+1,j]- g[i,j])(g[i- 1,j]-g[i,j]) <0,
当 g[i,j-1]> g[i,j]时,g[i,j]为山谷点;
当 g[i,j-1]< g[i,j]时,g[i,j]为山脊点。
2)若(g[i - 1,j]- g[i,j])(g[i+1,j]-g[i,j]) >0,且(g[i,j-1]- g[i,j])(g[i,j+1]-g[i,j]) <0,
当 g[i-1,j]> g[i,j]时,g[i,j]为山谷点;
当 g[i-1,j]< g[i,j]时,g[i,j]为山脊点;
当且仅当 (g[i-1,j]- g[i,j])(g[i+1,j]-g[i,j])=0 时,g[i,j]在此方向上是平地。
本文在此基础上,针对DEM数据本身的误差和沟谷中心线提取结果的准确性做了2点改进:
1)由于DEM数据在采集和加工时难免带来的误差,导致DEM数据中存在一些孤立点(和周围点的值相差较大的点),因此在DEM的预处理过程中通过低通滤波来去除噪声点的干扰,使DEM数据在一定范围内保持地形的连续性特征,从而使提取的沟谷中心线尽可能少地出现短枝和离散点。
2)文献[3]中建议使用3×3或者5×5的小窗口进行移动匹配,利用小窗口虽然计算速度较快,但是本文通过试验发现,窗口太小提取出来的沟谷中心线会出现较多的断裂现象。鉴于此,本文将移动窗口大小设置为17×17。另外,由于本文是基于IDL语言实现泥石流自动提取,而IDL语言对矩阵的执行效率相当高,所以利用较大窗口来匹配DEM数据,其计算速度并没有明显变化,且沟谷中心线的提取效果也比较理想。
提取沟谷中心线的步骤包括:首先对DEM数据做低通滤波去噪处理,处理时直接利用ENVI软件系统二次开发所带的系统函数(CONV_DOIT),函数参数METHOD设为3,可以根据需要设置平滑核的大小;然后利用一个17×17的窗口在DEM数据中按照2个方向(即水平和垂直方向)进行移动匹配、判断符合条件的DEM数据值,其判断条件是:
①水平方向,若(g[i- 1,j]- g[i,j]> 0 且g[i+1,j]-g[i,j]>0)且(g[i-2,j]- g[i,j]>0 且g[i+2,j]- g[i,j]> 0)且(g[i- 3,j]- g[i,j]> 0 且g[i+3,j]- g[i,j]> 0)且(g[i- 4,j]- g[i,j]> 0 且g[i+4,j]- g[i,j]> 0)且(g[i- 5,j]- g[i,j]> 0 且g[i+5,j]- g[i,j]> 0)且(g[i- 6,j]- g[i,j]> 0 且g[i+6,j]- g[i,j]> 0)且(g[i- 7,j]- g[i,j]> 0 且g[i+7,j]- g[i,j]> 0)且(g[i- 8,j]- g[i,j]> 0 且g[i+8,j]-g[i,j]>0),则 g[i,j]为沟谷点。
②垂直方向,若(g[i,j- 1]- g[i,j]> 0 且g[i,j+1]-g[i,j]>0)且(g[i,j- 2]- g[i,j]> 0 且g[i,j+2]-g[i,j]> 0)且(g[i,j- 3]- g[i,j]> 0 且g[i,j+3]- g[i,j]> 0)且(g[i,j- 4]- g[i,j]> 0 且g[i,j+4]- g[i,j]> 0)且(g[i,j- 5]- g[i,j]> 0 且g[i,j+5]- g[i,j]> 0)且(g[i,j- 6]- g[i,j]> 0 且g[i,j+6]- g[i,j]> 0)且(g[i,j- 7]- g[i,j]> 0 且g[i,j+7]- g[i,j]> 0)且(g[i,j- 8]- g[i,j]> 0 且g[i,j+8]-g[i,j]>0),则 g[i,j]为沟谷点。
需要说明的是,IDL中数组索引下标采用列行顺序。
尽管已经对DEM数据进行了上述预处理,但是难免提取出的沟谷中心线仍然存在一些短枝和离散点(图3(a))。因此,需要对提取结果中残存的短枝和离散点进一步剔除,并对提取结果进行数学形态学闭运算,以提高沟谷中心线的连续性。先膨胀后腐蚀的过程称为“闭运算”(先通过膨胀运算将不连续的沟谷中心线连接起来,再通过腐蚀运算将因膨胀而变“肥大”的沟谷中心线“瘦身”而恢复原貌),得到较为准确、连续的沟谷中心线(图3(b));最后对连续的沟谷中心线作形态学膨胀运算(膨胀核大小为5×5)后,得到沟谷范围(图3(c))。

图3 沟谷中心线与沟谷范围提取结果Fig.3 Extraction result for central lines of valley and valley ranges
2.2 阈值自动选取
将上述计算的NDVI,NDSI和PC1这3个遥感指数灰度图像合成,并再次进行主成分变换提取新的第一主成分;对所得到的灰度图像需要选择合适的阈值提取非植被信息和裸土信息。研究发现,经上述计算后得到的第一主成分图像的直方图存在多个波峰和波谷,为此,本文对Tsai[14]提出的基于双峰直方图的阈值选取算法进行了改进。改进后的算法针对新的第一主成分图像具有植被的灰度值较低、裸地的灰度值较高的特性,寻找多峰直方图中的多个波谷,并计算出对应于多个波谷的多个阈值。
由于计算后得到的新的第一主成分图像的灰度值为负数和小数,为了计算方便,首先要对图像的直方图做预处理。在实验区图像的直方图中,灰度值在0和255处都有较多像元。根据波峰波谷的定义,灰度值在0和255两个端点的直方图的波峰不存在,而实际上这2个值恰恰对应于植被和裸地。为此,在原始灰度直方图头尾各增加一个值为0的像元,使直方图两端多了2个波峰或波谷。这样既不违反波峰的定义,又可以把灰度值0和255处当作波峰处理。经预处理后,就可以利用阈值自动选取算法对直方图进行迭代滤波和阈值计算,实现非植被信息和裸地信息的自动提取。
3 自动提取与分析
3.1 泥石流自动提取流程
本文基于ENVI+IDL软件平台开发的泥石流自动提取系统的技术流程如图4所示。
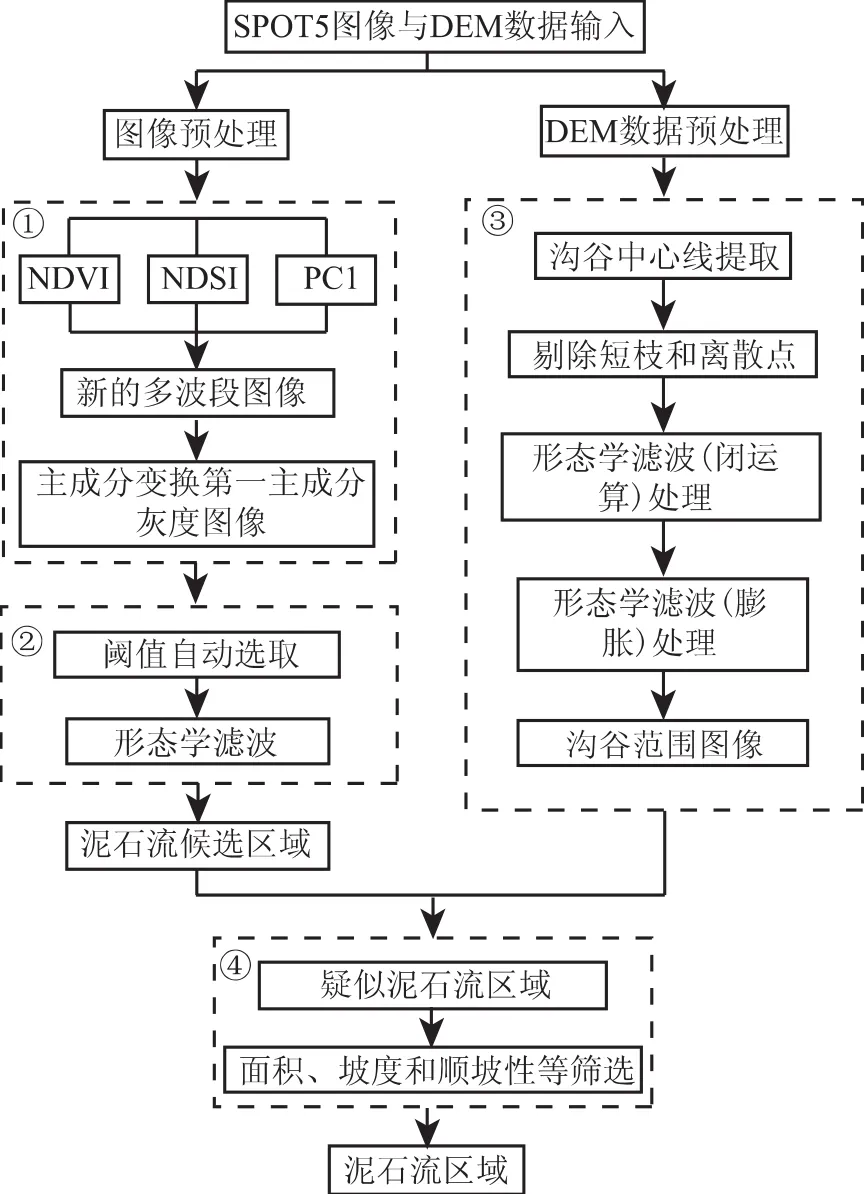
图4 泥石流自动提取流程Fig.4 Flow chart of automatic extraction of debris flow
包括如下4个重要部分:
1)泥石流信息遥感图像本底值计算(图4①)。通过对植被指数(NDVI)、土壤亮度指数(NDSI)和遥感图像经主成分变换得到的第一主成分(PC1)图像的集成计算和新一轮主成分变换,获取新的第一主成分图像。该灰度图像中,泥石流与周围地物的光谱值差异被增大,便于利用阈值自动选择算法准确有效地提取泥石流候选区域。
2)阈值自动选取(图4②)。对获取的新的第一主成分图像,利用改进后的基于多峰直方图的阈值自动选取算法进行泥石流阈值自动获取,并根据获取的阈值提取出泥石流候选区域。由于新的灰度图像中存在部分不纯净的像元,在提取的泥石流候选区域的二值图像中存在离散点和空洞点,因此要利用形态学滤波的闭运算(先膨胀后腐蚀)对离散点和空洞点进行剔除。
3)沟谷范围提取(图4③)。首先,基于DEM数据和改进的沟谷中心线算法提取沟谷中心线。由于地形总会存在一些洼地、鞍点和局部的一些小平原[3],且DEM数据在采集和处理过程中会带来各种误差,导致提取的沟谷中心线出现短枝和离散点,因此在提取沟谷中心线之前要对DEM数据进行平滑处理,在沟谷中心线提取之后还要对沟谷中心线提取结果进行形态学滤波处理,以消除短枝和离散点。然后,对消除短枝和离散点后的沟谷中心线再作形态学闭运算,以获得连续性较好的沟谷中心线(图3(b))。最后,利用形态学滤波对已获取的连续沟谷中心线进行一定核大小(5×5)的膨胀运算,得到沟谷范围(图3(c))。经上述处理后的沟谷范围比较符合沟谷的连续性特征,便于与泥石流候选区进行匹配。
4)泥石流信息筛选(图4④)。基于泥石流候选区的二值图像和沟谷范围二值图像做图像匹配处理,得到疑似泥石流栅格图斑,并将其矢量化;然后以泥石流形成的条件和泥石流的空间特征为筛选条件对疑似泥石流矢量图斑进行面积、坡度和顺坡性筛选,最终得到泥石流矢量图斑。
3.2 实验结果与分析
实验区位于福建省永泰县同安镇地区。采用2004年12月12日获取的SPOT5多波段图像数据(空间分辨率为10 m)。实验中假彩色合成图像采用 B2(R),B1(G),B3(B)的波段组合(图 5(a))。该区地势山高坡陡,残坡积土体厚宽大,土层结构松散,又由于常年降雨丰富,地表人为活动剧烈,该地区成为泥石流多发区之一。
根据上述泥石流自动提取流程,初步提取的疑似泥石流栅格结果如图5(b)所示,其中有一部分误提的图斑和一些噪声点,因此还要将其矢量化以后根据面积、坡度和顺坡性进行筛选,最后提取的泥石流结果与原始的假彩色合成图像(图5(a))的叠加显示见图5(c)(图中蓝色图斑为提取的泥石流信息)。
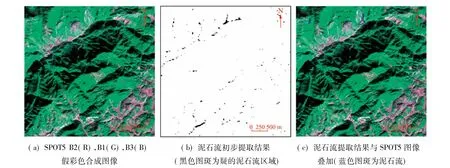
图5 泥石流提取结果Fig.5 Extraction result of debris flow
通过对泥石流的自动提取结果和人工目视解译结果的对比分析与验证,说明本文方法提取的结果具有较高的准确度。在实验结果的分析验证中,为了更加直观准确地进行人工目视解译并保证解译结果的准确性,将提取的泥石流结果与该地区三维透视立体影像图叠加(局部效果如图6所示,红色圆圈内为提取的泥石流),根据经验从泥石流的形成条件和植被发育程度、坡度坡向和顺坡性等泥石流解译标志进行人工目视解译和对比分析。结果表明,本文方法提取的泥石流信息较为准确合理,与基于野外经验的人工目视解译的结果较为吻合。

图6 泥石流提取结果与三维透视立体影像图叠加(观察方位角为60°,高度角为30°;红色圆圈内为提取的泥石流)Fig.6 Superposition of debris flow extraction result and 3D perspective image
4 结论
泥石流信息的提取往往涉及到多个方面。本文基于泥石流的地学特征、遥感成像机理和遥感图像本底值,提出将归一化差值植被指数(NDVI)、归一化差值土壤亮度指数(NDSI)和图像经主成分变换得到的第一主成分(PC1)等3种遥感指数集成来增强遥感图像中裸地、植被稀少区域和泥石流周围区域的光谱值差异,通过阈值自动选取获取泥石流阈值,结合DEM数据确定泥石流的沟谷范围,准确圈定了泥石流的空间位置,为泥石流的自动提取提供了有效手段。
经实验表明,本文提出的方法和技术有较好的适用性。但是,泥石流遥感信息的自动提取涉及的因素很多且很复杂,这无疑也增大了泥石流信息自动提取的难度和准确性,如在连续沟谷中心线经形态学膨胀运算得到沟谷范围的过程中,对连续沟谷中心线膨胀的宽度(膨胀核大小)是一个不确定的值,需要根据实际沟谷范围的平均值并经过反复试验才能确定比较合理的值,这些问题还有待于在以后的研究中进行探讨。
[1]吴 平,郑文晓.泥石流的形成条件及其防治措施[J].西部探矿工程,2008(3):4-5.Wu P,Zheng W X.Formation Conditions and Preventive Measures of Mudslides[J].West- China Exploration Engineering,2008(3):4-5(in Chinese).
[2]余 斌,杨永红,苏永超,等.甘肃省舟曲8.7特大泥石流调查研究[J].工程地质学报,2010,18(4):437 -444.Yu B,Yang Y H,Su Y C,et al.Research on the Giant Debris Flow Hazards in Zhouqu County,Gansu Province on August 7,2010[J].Journal of Engineering Geology,2010,18(4):437 - 444(in Chinese with English Abstract).
[3]王一川,秦 军.基于DEM自动提取泥石流沟谷边缘线算法的试验[J].四川测绘,2006,29(1):28 -31.Wang Y C,Qin J.The Test of Auto Extract Debris Flow Channels’Edge Arithmetic by DEM[J].Surveying and Mapping of Sichuan,2006,29(1):28 -31(in Chinese with English Abstract).
[4]白志勇.陆地卫星SPOT、TM数据复合影象在泥石流调查中的应用[J].水土保持学报,2001,15(1):116 -119.Bai Z Y.Application of Synthetic Satellite Image of SPOT and TM Data in Debris Flow Investigation[J].Journal of Soil and Water Conservation,2001,15(1):116 - 119(in Chinese with English Abstract).
[5]苏凤环,刘洪江,韩用顺.汶川地震山地灾害遥感快速提取及其分布特点分析[J].遥感学报,2008,12(6):956 -963.Su F H,Liu H J,Han Y S.The Extraction of Mountain Hazard Induced by Wenchuan Earthquake and Analysis of Its Distributing Characteristic[J].Journal of Remote Sensing,2008,12(6):956 -963(in Chinese with English Abstract).
[6]唐 川,丁 军,梁京涛.汶川震区北川县城泥石流源地特征的遥感动态分析[J].工程地质学报,2010,18(1):1 -7.Tang C,Ding J,Liang J T.Remote Sensing Images Based Observational Analysis on Characters of Debris Flow Source Areas in Beichuan County of Wenchuan Earthquake Epicenter Region[J].Journal of Engineering Geology,2010,18(1):1 - 7(in Chinese with English Abstract).
[7]唐小明,冯杭建,赵建康.基于虚拟GIS和空间分析的小流域泥石流地质灾害遥感解译——以嵊州市为例[J].地质科技情报,2008,27(2):12 -16.Tang X M,Feng H J,Zhao J K.Remote Sensing Interpretation of Small-water-basin Debris Flow Based on Virtual GIS and Spatial Analysis:Example from Shengzhou County[J].Geological Science and Technology Information,2008,27(2):12 - 16(in Chinese with English Abstract).
[8]潘仲仁,曹林英.遥感技术在成昆铁路泥石流沟调查中的应用[J].铁道工程学报,2006(增刊):237 -242.Pan Z R,Cao L Y.Application of Remote Sensing Technology in Surveying Debris Flow of Chengdu - Kunming Railway[J].Journal of Railway Engineering Society,2006(Supplement):237 -242(in Chinese with English Abstract).
[9]陈振民.环境本底值背景值基线值概念的商榷[J].河南地质,2000,18(2):158 -160.Chen Z M.Discussion on the Conception of the Environmental Original Value and the Environmental Background Value and the Environmental Baseline Value[J].Henan Geology,2000,18(2):158-160(in Chinese with English Abstract).
[10]江振蓝,沙晋明,杨武年.基于GIS的福州市生态环境遥感综合评价模型[J].国土资源遥感,2004(3):46 -48,60.Jiang Z L,Sha J M,Yang W N.Multiple Factors- based Remote Sensing Evaluation of Ecological Environment in Fuzhou[J].Remote Sensing for Land and Resources,2004(3):46 -48,60(in Chinese with English Abstract).
[11]李洪义,史 舟,沙晋明,等.基于人工神经网络的生态环境质量遥感评价[J].应用生态学报,2006,17(8):1475 -1480.Li H Y,Shi Z,Sha J M,et al.Evaluation of Eco - environmental Quality Based on Artificial Neural Network and Remote Sensing Technique[J].Chinese Journal of Applied Ecology,2006,17(8):1475-1480(in Chinese with English Abstract).
[12]江振蓝,沙晋明.植被生态环境遥感本底值研究——以福州市为例[J].福建师范大学学报:自然科学版,2008,24(4):80-85.Jiang Z L,Sha J M.Research into RS Background Value of Vegetation Eco - environment:with Fuzhou Taken as an Example[J].Journal of Fujian Normal University:Natural Science Edition,2008,24(4):80 -85(in Chinese with English Abstract).
[13]Rouse J W,Hass R H,Schell J A,et al.Monitoring Vegetation Systems in the Great Plans with ERTS[C]//Proceedings of the Third ERTS Symposium NASA:SP351 I,1973:309 -317.
[14]Tsai D M.A Fast Thresholding Selection Procedure for Multimodal and Unimodal Histograms[J].Pattern Recognition Letters,1995,16:653-666.
A Method for Automatic Extraction of Debris Flow Based on SPOT5 Image
XIE Fei,YANG Shu -wen,LI Yi-kun,LIU Tao
(School of Mathematics,Physics& Software Engineering,Lanzhou Jiaotong University,Lanzhou 730070,China)
Based on achievements obtained by previous researchers,the authors put forward a method for automatically extracting debris flow based on SPOT5 image and DEM data.Firstly,this method uses integrated computing of three indices of remote sensing,i.e.,the index of vegetation,the soil brightness index and the first principal component of the image after KL transformation,for the acquisition of a new principal component transformed image,and then extracts the bare land information containing debris flow by using automatic threshold selection algorithm.Secondly,on the basis of the DEM data at the scale of 1:10000,the valley central lines are extracted by using the improved valley line extraction algorithm,and the valley range is figured out by using the mathematical morphology filtering algorithm.Finally,the suspicious debris flow pattern is matched with the valley range pattern,and the vectorized result is screened in the aspects of area and slope.On such a basis,the information of existing or potential debris flows is obtained.The experimental results show that the extraction model of debris information from SPOT5 image can accurately and effectively extract the debris flow information.
debris flow;SPOT5;DEM;automatic extraction
TP 751.1
A
1001-070X(2012)03-0078-06
2011-09-23;
2011-10-21
中铁第四勘察设计院集团有限公司基金项目(编号:2009D06-1)资助。
10.6046/gtzyyg.2012.03.15
谢 飞(1984-),男,硕士研究生,主要研究方向为遥感数字图像处理、信息识别与提取。E-mail:443866295@qq.com。
(责任编辑:刘心季)
猜你喜欢
山东工业技术(2019年16期)2019-07-19 06:05:20
水土保持研究(2018年5期)2018-10-12 05:29:52
中国农业信息(2018年2期)2018-07-28 08:02:10
贵州科学(2016年5期)2016-11-29 01:25:34
——目镜套筒
上海计量测试(2016年1期)2016-08-03 11:30:56
中外医疗(2015年5期)2016-01-04 03:57:53
西藏科技(2015年1期)2015-09-26 12:09:29
科技创新与应用(2015年28期)2015-05-30 20:03:40
中国地质灾害与防治学报(2015年2期)2015-03-08 07:38:22
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:54:00
