
偏心轮腿六足机器人三足步态的静态稳定性分析
2012-12-25 08:05李君科王宇俊何新强
河南教育学院学报(自然科学版) 2012年1期
李君科,王宇俊,万 婷,何新强
(西南大学计算机与信息科学学院,重庆 400715)
偏心轮腿六足机器人三足步态的静态稳定性分析
李君科,王宇俊,万 婷,何新强
(西南大学计算机与信息科学学院,重庆 400715)
利用重心投影法,从偏心轮腿六足机器人的机身和三足步态的特点入手,分析了该机器人在使用三足步态行走时的特点,并论证了偏心轮腿六足机器人的三足步态具有静态稳定性的特点.
偏心轮腿六足机器人;三足步态;静态稳定性;重心投影法
0 引言
人们对于机器人的研究越来越注重它的实际使用功能,大到航空航天、宇宙探索、军事侦察和攻击,小到管道排障、疾病检查、抢险救灾等非结构环境下的自主作业[1].在这些环境里,传统的设计方法已经不能满足现实的需求.要解决这一问题,或者改变机器人的运动方式,或者改变机器人的运动机构.
轮子的应用历史悠久,因此大多数现代机器人采用这种运动机构.但其有不足之处,就是越障能力有限,并且在坎坷不平的地面运行时,稳定性满足不了人们的期望.机器人的运动机构从轮子发展到履带,增强了它对地面的适应能力,但缺乏轮子的灵活性.在不断的探索和研究中,人们发现具有轮子特点的偏心轮腿机器人具有很好的地面适应能力,如在有辐射、有粉尘、有毒及战场环境下执行侦察任务,在地震、塌方及火灾后的废墟中找寻伤员等.本文针对笔者研制的偏心轮腿六足机器人[2-3]及其常用的三足步态进行分析,并证明其使用三足步态具有稳定性的特点,进而说明了使用三足步态的合理性.
1 偏心轮腿六足机器人的三足步态概述
根据笔者设计的偏心轮腿六足机器人并结合经典的三足步态[4-5],构造了适合于该偏心轮腿六足机器人的三足步态,并约定如下.
(1)设定偏心轮腿有停止、支撑相和摆动相共3种状态.腿的支撑相是腿部接触地面的状态,腿处于摆动相状态是腿部抬离地面而处于空中的状态.分别用0、ω1和ω2来表示偏心轮腿的转速,0表示停止,ω1表示处于摆动相的电机速度,ω2表示支撑相的速度,它们的方向有如下规定,顺时针为“+”,为正时“+”可不写,逆时针为“-”.每只腿可以检测其触地点Q离地点P和处于支撑相的各点QP的状态.
(2)设定把偏心轮腿六足机器人的六只腿分成A、B两组.如图1所示,规定以读者的角度为准,以视线对图1的面为基准,从上到下依次为偏心轮腿机器人的左面和右面,读者的右边记为机器人的前面,左边记为机器人的后面,机器人左边的前腿(L1)、后腿(L3)和右边的中腿(R2)为A组,右边的前腿(R1)、后腿(R3)和左边的中腿(L2)为B组.
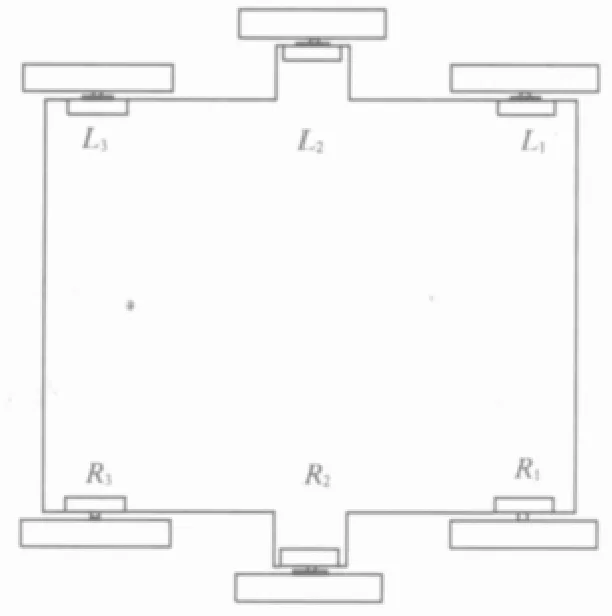
图1 机器人的方向规定Fig.1 The regulation of the robot direction
(1)初始阶段 如图2中(a)所示,A组腿Q点触地,B组腿P点触地;此时对各腿的驱动电机设置转速与方向,A组为ω2,B组为ω1,方向都为顺时针.当各腿状态如图2中的(a)时为进入第一运行阶段做准备.
(2)第一运行阶段 A组腿Q点离地,QP中的任一点触地,进入支撑相运行阶段;同时B组腿P点离地,腿上没有任何点接触地面,进入摆动相运行阶段,如图2中的(b);此时,A组各腿的转速为ω2,B组各腿的转速为ω1,方向都为顺时针;在运行过程中对各腿进行检测,如果A组中各腿的P点触地则修改参数,同样也对B组腿进行相应的检测和修改参数.此时对各腿的驱动电机设置转速与方向,A组为ω1,B组为ω2,方向都为顺时针.A组腿和B组腿状态如图2中的(c)所示时,第一运行阶段结束,进入第二运行阶段.
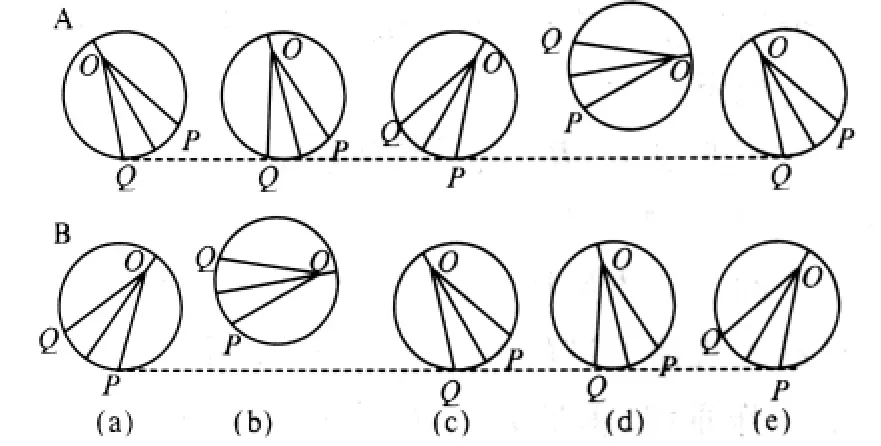
图2 偏心轮腿三足步态状态示意图Fig.2 The figure of eccentric-type legged three-foot gait state
(3)第二运行阶段 A组腿P点离地,腿上没有任一点接地,进入摆动相运行阶段;同时B组腿Q点离地QP中的任一点触地,进入支撑相运行阶段,如图2中的(d);此时,A组各腿的转速为ω1,B组各腿的转速为ω2,方向都为顺时针;在运行过程中对各腿进行检测,如果A组中各腿的P点触地则修改参数,同样也对B组腿进行相应的检测和修改参数.当轮腿状态如图2中(e)所示((e)和(a)相同),第二运行阶段结束.
从图2可以看出,机器人经过初始状态(a)、A组支撑相和B组摆动相状态(b)、A组和B组状态相互转换状态(c)、A组摆动相和B组支撑相状态(d),最后回到初始状态(a),完成一个完整的运行周期,进而开始下一个运行周期.这样往复运动便实现了机器人以三足步态方式的运动.
2 三足步态的稳定性分析
我们采用经典的重心投影法(CG Projection Method)[6-7]分析六足机器人在平坦环境下的稳定性.重心投影法对机器人静态稳定步行时的稳定裕度定义为,机器人重心的水平投影至支撑多边形各边界距离的最小值.当稳定裕度Sm>=0时,即重心落在水平投影平面内,则可以说明机器人是稳定的.重心投影法的表示为:Sm=min{Si,f,Si,l,Si,r},其中Sm为稳定裕度,Si,f为机器人重心的水平投影到机器人支撑多边形边缘f的距离,Si,l为机器人重心的水平投影到机器人支撑多边形边缘l的距离,Si,r为机器人重心的水平投影到机器人支撑多边形边缘r的距离.
以下分析偏心轮腿机器人行走的着地点.如图3所示,设机器人的驱动轴离地高度为h,偏心轮腿圆半径为r,偏心距为e,则h=h0,h0为驱动轴心与机体底部的距离,偏心圆的圆心为O',驱动轴的中心为O.可见,Q为偏心轮腿着地的第一点,P为偏心轮腿着地的最后一点(P、Q关于过驱动轴中心O的直径对称),所以最大着地范围为圆弧QP.而要保证机体不与地面相碰,着地点应选择在弧QM中的某一点,其中点M为以驱动轴中心O点为起点,经过圆心O'的射线与圆弧的相交点.

通常机器人在水平地面行走时,轴心与水平地面的距离为h并且h>h0,线段OQ=ls为驱动轴轴心与着地点的连线,OQ的长度也就是驱动电机的转动力臂ls,且ls在水平面上的投影即O0Q0,O0为O点在水平面上的投影,Q0为Q在水平面的投影,可得驱动轴轴心O在水平面的投影O0到着地点在水平面上的投影Q0的距离d,

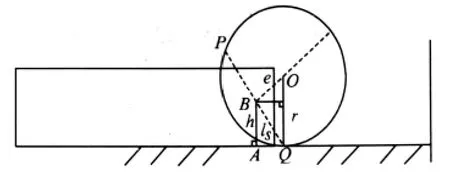
图3 最大着地点范围分析Fig.3 Analysis on the maximum landing scope
如果着力点在水平面上,则水平面上的Q0和Q重合,如果着力点不在水平面上而是在水平的障碍物上,式(1)和式(2)也适用,式(1)中的φ为OQ与OO'M的夹角.
除了龙王庙,笔者认为,船厂附近还应有衙署、军营、驿站、工棚、库房、工匠住宅、码头等设施,当然这些不可能全是刘清所建。因为刘清第一次来到船厂时,船厂已经建立整整十年了,基础设施和军政建制应该完善了,刘清对此大多是进行修缮和增扩建。
由上述分析可得

由机器人在水平地面行走的过程可知,当机器人的机身重心固定时,每只腿的方向一致,且每只腿d的最大距离为e时,机器人以三足步态行走.依重心投影法的理论可知,这时机器人是最有可能不稳定的,如果在这种情况下是稳定的,则机器人在其他任何情况下也是稳定的.下面通过重心投影法对这种最不稳定的情况进行稳重裕度分析.
我们假设L1、R2、L3三只腿触地,用A、B、C表示触地点,则三角形ABC构成一组支撑三角形.如图4所示,采用如下方法建立坐标系,机器人的重心在水平面上的投影为坐标原点O,以过O点和驱动轴R2的轴心在水平面上的投影所在的直线为X轴,以向右方向为X轴正方向.过原点作X轴的垂线,垂线为Y坐标轴,以机器人机体前进的方向为正方向.则A、B、C的坐标分别为A(xA,yA)、B(xB,yB)、C(xC,yC),由O向AB、BC、CA作垂线,垂足E、F、D的坐标分别为E(xE,yE)、F(xF,yF)、D(xD,yD),S1、S2、S3分别为重心投影到支撑边的距离,m为L3、R3间的宽度,m0为R3比R2多伸出的长度,l表示R1与R3的距离,e表示偏心距.
则直线AB方程为

由直线OE垂直于直线AB,则直线OE的方程为

由式(3)式(4)可求出垂足E点的坐标(xE,yE),
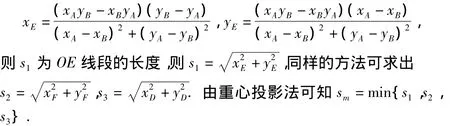
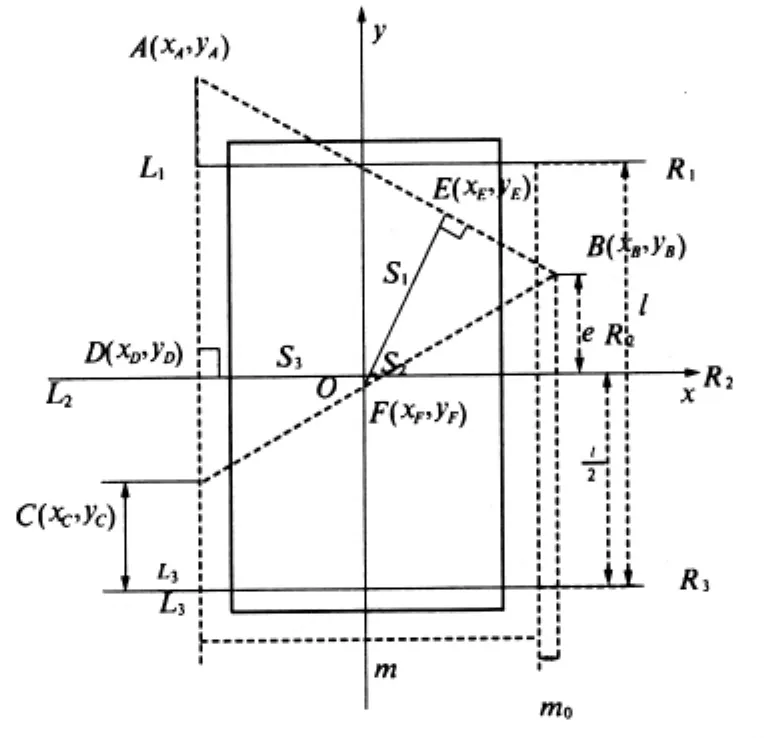
图4 三足步态稳定裕量计算图Fig.4 The stability margin calculation figure of the three-foot gait
通过以上分析并结合图4可见,S2在此状态最小,若在约束条件下有yF<0,则机器人的重心没有落在CB外侧,所以三足步态是稳定的.
由此可得F点的纵坐标

由图4可知B点、C点坐标为



由偏心距定义可知

偏心轮腿六足机器人在整体设计约束条件为

由式(7)和式(8)可得

由式(6)和式(9)可得yF<=0,由此可知机器人重心落在水平投影平面内,即重心的投影落在了稳定区域内,也就是说机器人的重心不会超出其支撑三角形.因为即使在最坏的状态下,重心的投影也不会超出其稳定区域,则其他状态下也不会超出稳定区域,可见偏心轮腿六足机器人以三足步态行走是稳定的.
3 实验与分析
由上面的分析可以得出结论,只要设计的六足机器人的重心在其三足步态的支撑三角形内,则机器人在平坦的地面行走时不会发生偏倒、侧重,从而使机器人保持行走稳定性.笔者设计的三足步态满足上述要求,通过机器人的行走测试发现,该机器人在行走时不会出现不稳定的情况,说明该偏心轮腿六足机器人采用的三足步态行走时满足稳定性要求.
4 结束语
多足机器人的应用越来越广泛,其行走的步态也多种多样,在设计多足机器人步态时要充分考虑其稳定性,才能使其应用到机器人当中.本文以笔者设计的偏心轮腿六足机器人为分析基础,详细分析了该机器人三足步态的稳定性,为以后的工作奠定了基础.
[1] 谭兴军,王宇俊,何新强.基于单片机的管道机器人多路数据实时采集系统的设计[J].工业控制计算机,2010(11):23-26.
[2] 何新强,王宇俊,谭兴军.偏心轮腿六足机器人控制电路设计[J].河南教育学院学报:自然科学版,2011,20(1):36-40.
[3] 万婷,王宇俊,李君科,等.偏心轮腿六足机器人四足步态规划[J].河南教育学院学报:自然科学版,2011,20(4):41-44.
[4] TAN XINGJUN,WANG YUJUN,HE XINQIANG.The gait of a hexapod robot and its obstacle-surmounting capability[C]//Proc of the World Congress Intelligent Control and Automation.Taibei,2011.
[5] KOMSUOGLU H,SOHNX K,FULL R J,et al.A physical model for dynamical arthropod running on level ground[C]//Proc of the 11th International Symposium on Experimental Robotics.Greece:Athens,2008.
[6] MCGHEE R B.Some Finite State Aspects of Legged Locomotion[J].Math Biosci,1968,2(1-2):67-84.
[7] GONZALEZ D S P,JIMENEZ M A,ARMADA M A.Dynamic effects in statically stable walking machines[J].Journal of Intelligent and Robotic Systems,1998,23(1):71-85.
Static Stability Analysis on Three-Foot Gait of Eccentric-Type Legged Hexapod Robot
LI Jun-ke,WANG Yu-jun,WAN Ting,HE Xin-qiang
(College of Computer and Information Science,Southwest University,Chongqing400715,China)
By the method of gravity center projection,from the eccentric-type legged hexapod robot’s body and the characteristics of three-foot gait,the trait of robot is analyzed when it walks with three-foot gait.The characteristics of static stability in eccentric-type legged hexapod robot’s three-foot gait is demonstrated.
eccentric-type legged hexapod robot;three-leg gait;static stability
TP242.6
A
1007-0834(2012)01-0040-04
10.3969/j.issn.1007-0834.2012.01.014
2011-12-26
李君科(1986—),男,河南辉县人,西南大学计算机与信息科学学院在读硕士研究生.
猜你喜欢
保健医苑(2023年2期)2023-03-15
现代仪器与医疗(2022年4期)2022-10-08
轴承(2022年1期)2022-06-07
演艺科技(2021年7期)2021-09-01
数学物理学报(2021年1期)2021-03-29
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
中国金属通报(2019年4期)2019-07-29
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
电子制作(2018年18期)2018-11-14
