
自适应神经模糊推理系统在电动机软启动中的应用
2012-12-25 02:08李冬辉王莹莹马禹新
黑龙江科技大学学报 2012年4期
李冬辉, 王莹莹, 马禹新
(天津大学 电气与自动化工程学院,天津 300072)
自适应神经模糊推理系统在电动机软启动中的应用
李冬辉, 王莹莹, 马禹新
(天津大学 电气与自动化工程学院,天津 300072)
异步电动机直接启动产生的冲击电流会造成严重的电网冲击,因此提出将自适应神经模糊推理系统应用到电动机软启动控制中,充分发挥神经网络自适应学习和模糊推理不要求掌握被控对象精确模型处理结构化知识的能力,实现电动机软启动的智能控制。利用电机转速、负载转矩、触发角的对应关系作为训练样本,采用混合学习算法调整前提参数和结论参数,自动产生模糊规则,构建自适应神经模糊推理系统,根据给定的电机转速和转矩产生合适的晶闸管触发角。经仿真分析,结果表明:训练构建的自适应神经模糊推理系统能够很好地进行电机的速度控制,可以实现风机或泵类负载电动机的软启动。
自适应神经模糊推理系统;异步电机;晶闸管;软启动
0 引言
异步电动机直接启动会产生较大的冲击电流。一方面,它会造成严重的电网冲击,降低电网的供电质量并影响其他设备的正常运行;另一方面,还会使电动机的绝缘绕组过热老化,影响电动机的使用寿命。为了解决上述问题,常用反并联晶闸管构成三相交流调压电路,通过控制晶闸管的触发角调整施加到电动机上的电压,实现电机的软启动[1-2]。但是,异步电动机启动是一个非线性时变过程,电机启动过程中的反馈电流和晶闸管触发角之间也没有精确的数学模型,因此,很多学者对电机软启动的控制方法在进行深入研究[3-4]。
自适应神经模糊推理系统是一种将模糊逻辑和神经元网络有机结合的新型的模糊推理系统结构[5-6]。将模糊推理系统(FIS)中的模糊逻辑规则及隶属度函数参数通过神经网络的自学习来制定,并自动产生模糊规则,克服该规则主要根据专家经验设计的问题。系统既具备模糊控制不要求掌握被控对象精确模型及强鲁棒性的特点,又具有神经网络自学习及高控制精度的优点,在很多领域都有广泛的应用[7-10]。
笔者基于自适应神经模糊推理系统(ANFIS),利用神经网络具有的自学习功能和模糊推理表达模糊语言的特点,通过大量数据训练模糊隶属度函数及模糊规则,试图构建ANFIS控制器对晶闸管触发角进行开环控制实现电机的软启动。
1 自适应神经模糊推理系统
自适应神经模糊推理系统(ANFIS)是将模糊推理系统与神经网络相结合的产物。模糊推理系统广泛用于模糊控制,通过隶属度,使规则数值化。神经网络具有自适应自学习的功能,通过对大量数据的学习,估计输入输出数据之间的映射,并具有很强的泛化能力。ANFIS则充分利用模糊推理系统与神经网络各自的优良特性,使用给定的输入输出数据集来构建模糊推理系统(FIS),其隶属度函数参数可使用最速下降法(或反向传播方法)与最小二乘方法相结合的混合学习算法一起进行调节,允许模糊系统用要建模的数据进行学习,使隶属度函数适应输入输出数据。ANFIS与模糊推理系统和神经网络系统相比,它既可以表达模糊语言变量,又具有学习功能,能以任意精度逼近任何线性或非线性系统。
ANFIS是将Sugeno一阶模糊推理系统以网络的形式实现时得到的一种神经网络[5],对于一阶Sugeno模糊模型,假定模糊推理系统有2输入x、y,单输出f,具有2条模糊if-then规则的普通规则集:

该系统相应的ANFIS结构,如图1所示。
第一层,负责输入信号的模糊化,节点i具有输出函数:

其中x是节点i的输入,Ai是模糊集。O1i就是Ai的隶属度函数值,表示x属于Ai的程度。通常选取μAi(x)为钟形函数,如
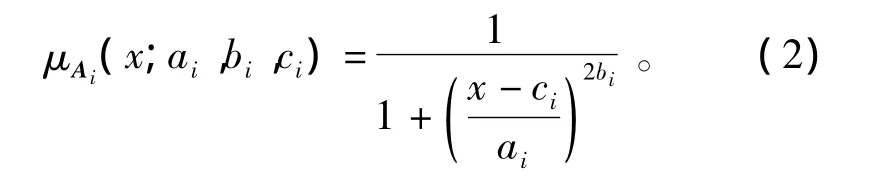
这里ai,bi,ci为前提参数,隶属函数的形状随这些参数的改变而改变。
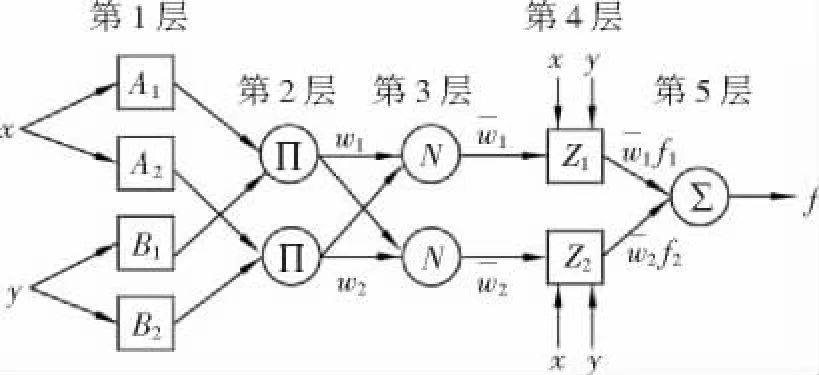
图1 ANFIS结构Fig.1 Structure of ANFIS
第二层,模糊推理,计算每条规则的适用度。这层节点负责将输入信号相乘,如:wi=μAi(x)×μbi(y)每个节点的输出代表一条规则的可信度。这里的×可以是任何满足T规范的and算子。
第三层,第i个节点计算第i条规则的归一化可信度:

第四层,根据模糊规则计算各规则输出:

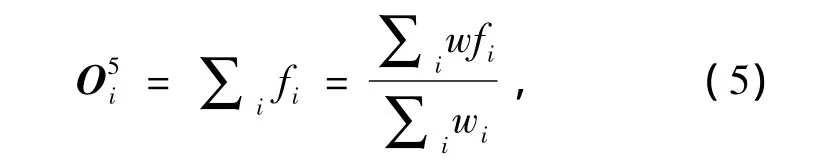
第五层,ANFIS网络输出:
给定前提参数后,ANFIS的输出可以表示成结论参数的线性组合:
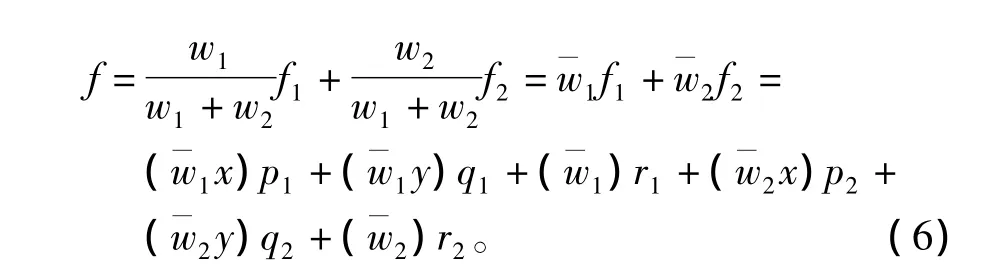
对于图1所示的ANFIS网络参数的学习,可以分为前提参数的学习和结论参数的学习两部分。假定训练集为{xdi,ydi,fdi},(i=1,2,…,p),fdi为当输入为{xdi,ydi}时的ANFIS的实际输出。则由式(6)可得:
X=[p1,q1,r1,p2,q2,r2]T1i和2i是输入{xdi,ydi}时12的值。即结论输出是结论参数集X的线性函数,可使用最小二乘法得到均方误差最小min‖AX-f‖意义下的参数最优解:

根据上一步骤计算得到的结论参数进行误差计算,采用前馈神经网络中的BP算法,将误差由输出端反向传到输入端,用梯度下降法更新前提参数,从而改变隶属函数的形状。
2 基于ANFIS的电机软启动
软启动器一般采用三对反并联晶闸管构成三相调压电路,通过控制晶闸管的触发角,调节晶闸管调压电路的输出电压,实现电机的平稳启动,减小启动电流对电网的冲击。
一般的三相调压电路由于没有中线,所以在工作时若要负载电流流通,至少要有两相构成通路,且其中一相是正向晶闸管导通,另一相是反向晶闸管导通。为了保证在电路起始工作时能使两个晶闸管同时导通,以及在感性负载与控制角较小时仍能保证不同相的两个晶闸管同时导通,要求采用能够产生大于60°的宽脉冲或双脉冲的触发电路。为了保证输出电压三相对称并有一定的调节范围,要求晶闸管的触发信号除了必须与相应的交流电源有一致的相序外,各触发信号之间还必须严格地保持一定的相位关系。
运用matlab/simulink电力系统工具箱构建电机软启动仿真模型,给定一恒定触发角,改变负载转矩,计算每次运行的稳态转速,改变触发角重复这一过程,得到对应不同触发角、转矩、转速曲线,如图2所示。
从图2中可以看到对应0~30°触发角,转矩速度曲线比较相似,这主要是由于触发角小于等于功率因数角,晶闸管连续导通,在这个范围内改变触发角对电机定子端电压没有影响,转矩转速值也就相应没有变化。
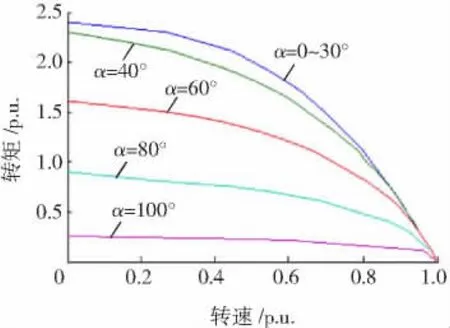
图2 对应不同触发角的转矩速度曲线Fig.2 Curve of torque speed corresponding to differert thyristor firing angle
ANFIS控制的本质是采用神经网络技术设计模糊控制器,在处理非线性对象特性时比线性控制器具有更丰富的表现能力,可有效地应用于非线性系统的控制中。基于ANFIS的电机软启动在进行训练之前,必须获得其输入输出样本数据。其训练方式采用离线训练方法,并通过模糊控制器进行自适应。
运用多次仿真,得到转速转矩触发角对应关系,构成训练数据集作为训练样本,训练自适应神经模糊推行系统,系统的输入为电机的转速和转矩,输出为晶闸管的触发角。系统输入变量的隶属度函数类型采用钟形隶属度函数,其个数均为7。则第一层结点数为14个;第二层的结点数为49个,分别表示输入结点的组合;第三层结点也为49个,代表49条规则的真值;第四层结点为49个,分别表示各条规则真值的归一化值;第五层结点为49个,分别代表每条规则对应的输出;第六层为1个,即控制器的输出,其函数为一阶线性函数。由genfis1函数产生初始的FIS结构,设定ANFIS训练的步长为150次。利用anfis的函数训练ANFIS,训练结束误差降为0.092 88。
在ANFIS训练完成以及检验后,可得到如图3所示的系统训练后的隶属度函数。对ANFIS进行训练,调节好前提参数,再将训练好的ANFIS用于晶闸管触发角控制。这样做实际上是利用了ANFIS的网络结构从样本数据中归纳出经验,调节模糊规则及相应隶属度函数的参数,训练得到的ANFIS即成为一般的模糊推理系统。在实际应用中对ANFIS的参数进行在线调节将能更充分的发挥ANFIS自适应的特点。
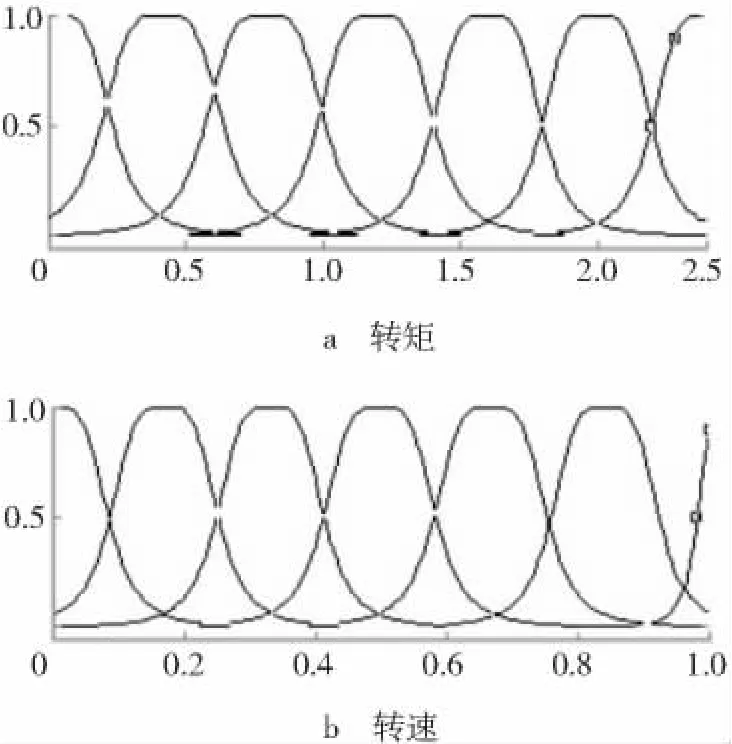
图3 训练后的隶属度函数Fig.3 Membership function after training
3 仿真分析
把训练得到的ANFIS加入到电机启动仿真模型中,系统结构如图4所示。ANFIS控制器的输入量为参考转速和参考转矩,输出为晶闸管触发角。电机负载考虑为泵类或风机负载,满足如下转矩速度特性:

其中k=1.8(Nms2/rad2)为常数。
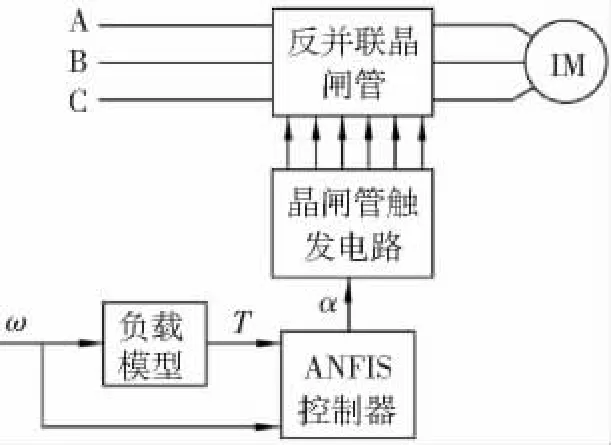
图4 带ANFIS控制器的仿真模型Fig.4 Simulation model with ANFIS controller
仿真当中给定一参考转速,参考转矩通过转速和负载模型计算得到,参考转速、转矩送入ANFIS模型,产生相应的触发角,由晶闸管触发电路产生触发脉冲实现电机的启动。
给ANFIS控制器输入合适斜率的斜坡信号作为参考转速,使电机按照斜坡参考转速从0上升到稳态转速。从图5中可以看到,电机转速按照斜坡输入平稳上升,稳态时最终到达斜坡设定值。图6a给出了电机转速,电流有效值随时间变化的曲线,同时为了对比起动电流,图6b给出了电机直接启动的定子电流有效值曲线。如图6b所示,直接启动时,电机在到达稳态前,定子电流有效值达到近4倍额定电流。而通过ANFIS控制,电机定子电流的有效值在1.5倍额定电流以内且较平滑的上升到稳态电流,实现了电机的软启动。
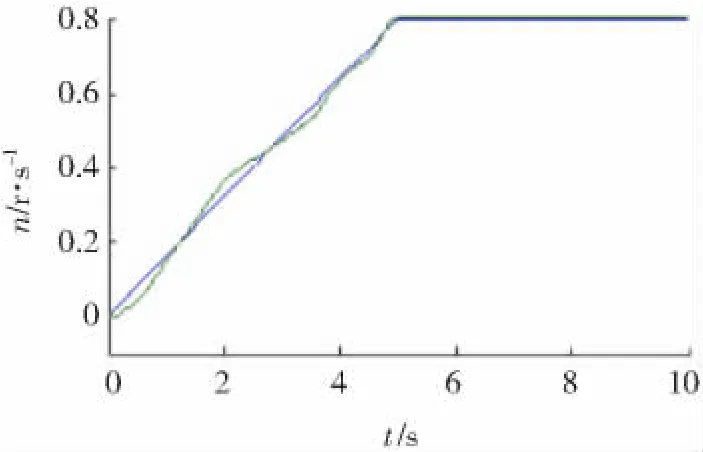
图5 输入斜坡时的转速响应曲线Fig.5 Response curve of speed with slope input
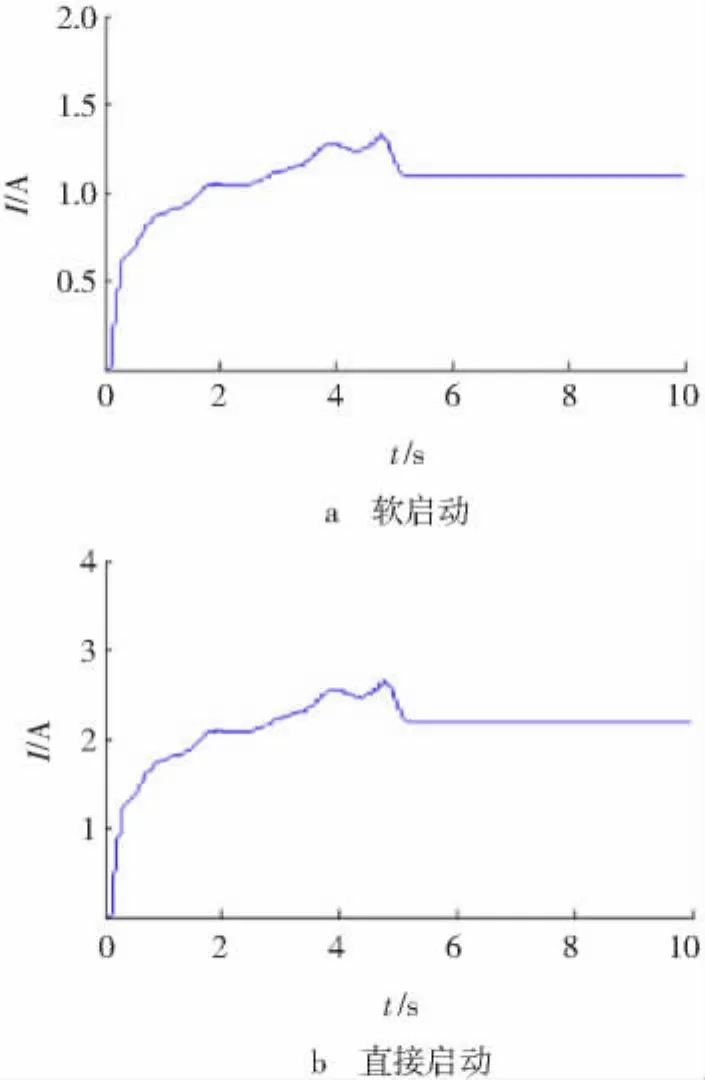
图6 起动定子电流Fig.6 Stator current in soft start
基于ANFIS设计的软启动控制器还可以用来进行速度控制。如图7,给定参考转速在0时刻上升到0.6p.u.,4s时刻上升到0.8p.u.,8 s时刻下降为0.7p.u.,从相应的电机转速上升曲线看到其能够很好的跟踪参考转速的变化。
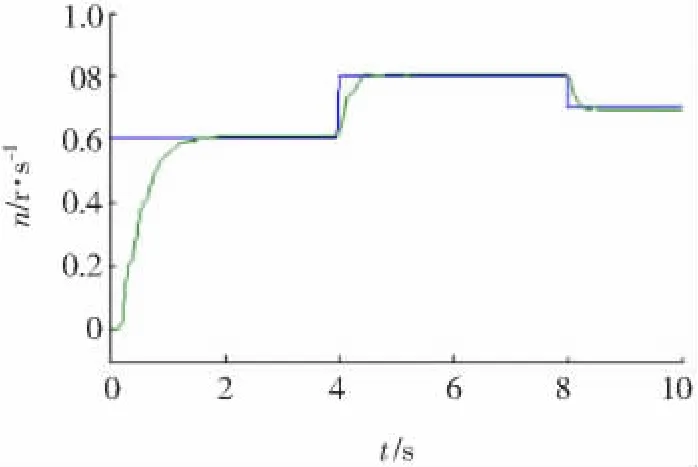
图7 转速响应曲线Fig.7 Stator current when starting directly
4 结束语
ANFIS应用于电机软启动,能有效地利用人类知识处理不精确及不确定的情况,加强了对未知或变化的环境进行学习和调节的性能。自适应神经模糊推理系统将神经网络与模糊推理有机结合,发挥了神经网络具有的自学习功能和模糊推理表达模糊语言的特点,利用大量已知数据训练模糊隶属度函数及模糊规则,在电机软启动当中显示出良好的性能。
[1]GASTLI A,AHMED M M.ANN-based soft starting of voltagecontrolled-fed im drive system[J].Energy Conversion,2005,20(3):497-503.
[2]肖蕙蕙,王志强,李 山.基于模糊控制的三厢异步电机软启动研究[J].现代电子技术,2011(10):136-138.
[3]杜新伟,刘涤尘,李 媛,等.自适应神经模糊推理系统在电力故障重现中的应用[J].电网技术,2006,30(6):82-87.
[4]崔宝侠,杨继平,徐 冰.ANFIS实现的模糊神经网络在交通信号配时优化中的应用[J].信息与控制,2006,35(1):79-83.
[5]陈忠化,郭凤仪,石兆元.异步电动机软启动控制方法的研究与仿真[J].工矿自动化,2008(1):4-7.
[6]贾 媛,佟 威,李红莲,等.基于模糊自适应控制的电机软启动仿真[J].电气技术,2009(9):63-65.
Application of adaptive neuro-fuzzy inference system in motor soft start
LI Donghui, WANG Yingying, MA Yuxin
(College of Electrical Engineering and Automation,Tianjin University,Tianjin 300072,China)
Aimed at addressing serious grid impact entirely due to the impact of electricity resulting from direct start of induction motor,this paper introduces the application of the adaptive neuro-fuzzy inference system to the control of motor soft start.The method renders it possible to give a fuller play to the ability of adaptive learning of neural networks and fuzzy inference without the need to master the exact model of the object,and finally achieve the intelligent control of motor.The method consists of using the relationship of motor speed,load torque and the firing angle as training samples,and applying the hybrid learning algorithm to adjust the premise parameters and conclusion parameters,generating the fuzzy rules automatically and building the adaptive neuro-fuzzy inference system,and generating the appropriate thyristor trigger angle according to the given motor speed and torque.The simulation analysis shows that,the adaptive neuro-fuzzy inference system after training can afford a better control of motor speed,and thus promises to make possible the soft start of fan or pump load motor.
adaptive neuro-fuzzy inference system;induction motor;thyristor;soft start
TP273.4
A
1671-0118(2012)04-0428-05
2012-07-08
国家自然科学基金项目(60874077)
李冬辉(1962-),男,黑龙江省伊春人,教授,博士生导师,研究方向:电力电子应用、楼宇自动化、计算机控制,E-mail:lidonghui@tju.edu.cn。
(编辑 徐 岩)
猜你喜欢
现代信息科技(2022年20期)2022-11-17
电子制作(2019年19期)2019-11-23
四川冶金(2018年1期)2018-09-25
通信电源技术(2016年1期)2016-04-16
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
东北电力大学学报(2015年1期)2015-11-13
电机与控制应用(2015年3期)2015-03-01
海军航空大学学报(2015年4期)2015-02-27
电子设计工程(2015年12期)2015-02-27
