
城市轨道车辆制动能量回收方法
2012-12-25 02:08宋瑞刚
黑龙江科技大学学报 2012年4期
杨 俭, 宋瑞刚
(上海工程技术大学 城市轨道交通学院,上海 201620)
两端的变电站端电压不受其它供电臂电流情况的影响,简化后的牵引网等效模型如图1所示。
城市轨道车辆制动能量回收方法
杨 俭, 宋瑞刚
(上海工程技术大学 城市轨道交通学院,上海 201620)
城市轨道车辆频繁的制动过程产生了大量的电能。该部分能量在不满足反馈电网条件时常常通过制动电阻的方式消耗,导致了能量的浪费。结合动力学理论和供电网络关系分析了城市轨道交通车辆制动能量产生的特性及约束条件,提出一种基于车载的脱离电网的制动能量回收方法,并通过制动能量回收实验系统,进行了实验研究。结果表明,利用该系统可以对城市轨道车辆制动能量进行有效的回收。
城市轨道车辆;制动能量;能量回收方法
0 引言
城市轨道交通车辆运行的特点为载客量大、启动和制动频繁。车辆的常规制动过程以电制动方式优先。由于车辆运行图编排及触网电压限制等原因,大量再生电能不能回馈电网,而是通过电阻制动以热能的方式释放,形成了电能浪费与环境污染,并增加了制动系统相关回路的不安全隐患。关于城市轨道交通再生制动能量的回收利用问题,国内外学者提出了许多方法,主要包含三种:一是再生能量向交流电网实时回馈的方法;二是将再生能量存入储能器,在车辆启动或加速时弥补直流网压下降的方法;三是两种方法的结合,即储能与回馈并用的方法[1-3]。针对其中的功率变换方案,也提出过多种方案,但总体特点为:一是能量回馈的谐波治理负担重,二是对牵引变电所或车辆牵引系统更改大,并引入了新的影响运营安全的因素。笔者研究了城市轨道车辆的制动能量产生特性,提出了针对再生制动条件不能满足情况下的基于车载本身的脱离电网的能量回收方法及利用方式,并进行了实验研究。
1 制动能量的产生特性
1.1 基于动力学关系的车辆制动能量特性
不考虑垂向和横向力带来的电机制动转矩波动影响,车辆制动过程中动力学模型可表示为
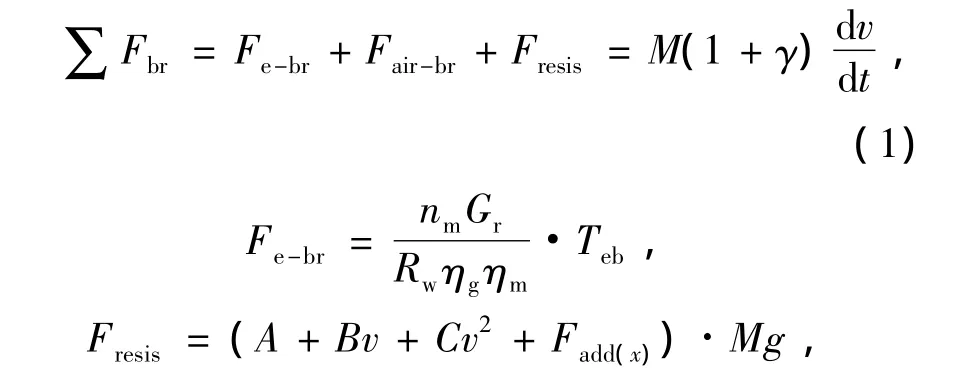
式中:Fbr——车辆总的制动力;
Fe-br——电制动力;
Fair-br——电制动力不足时补充的机械制动力;
Fresis——车辆运行阻力;
M——车辆编组的总质量;
γ——车辆回转质量系数;
v——车辆运行速度;
nm——车辆提供动力的动轴数量;
Gr——齿轮箱传动比;
Rw——车轮半径;
ηg——齿轮传动系的效率;
ηm——电机的效率;
Teb——制动过程中单台电机提供的电磁转矩;
A、B、C——与车辆类型有关的经验常数;
Fadd(x)——线路总的附加阻力,是车辆发车后自起始站点行驶里程x的分段函数;
g——重力加速度。
牵引电机需提供的制动转矩除与车辆运行特性有关外,同时与制动模式相关。常规制动过程中,若v≥vinv,且 Febmax≥Freq,则 Fe-braking=Freq,Fair-braking=0;若v≥vinv,且 Febmax< Freq,则 Fe-braking=Febmax,Fair-breaking=Freq- Fe-braking;若 v< vinv,则 Feb=0,Fair-breaking=Freq;在紧急制动过程中,Fe-braking=0,Freq=Fair-breaking。
其中,vinv为空气制动介入时的车速;Febmax为可产生的电制动力最大值;Freq为电子制动控制单元

电机产生的制动电磁转矩Teb由牵引控制单元实时控制。当牵引电机中感应电势高于电网电压,电机将处于发电工作状态,逆变器的功率流向也与牵引工况相反。反馈功率可由电机及逆变器电气特性参数得到:

式中:U——电机相电压;
I——电机相电流;
cosθ——电机功率因数;
ηrec——逆变器整流桥的电能转换效率。
由于电机电能由车辆动能转换而来,故再生制动反馈电能也可直接由动力学关系得到:EBCU根据当前车辆运行条件计算得出的需要的总制动力。事实上,在非紧急制动情况下,且速度高于空气制动介入点时,电制动力通常能够满足总制动力需求,并且制动系统供应商在技术上尽力提高电制动能力,并尽可能降低空气制动介入时的vinv值。
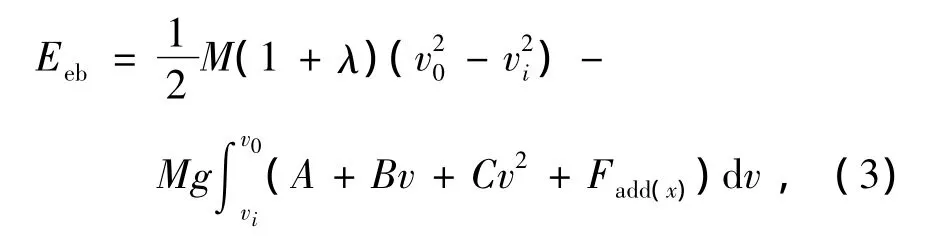
车辆实施电制动的过程中,牵引电机定子的旋转磁场频率低于转子的旋转频率,牵引电机所需提供的反向电磁转矩可依据式(1),由车辆结构参数、牵引传动系统参数及车辆运行外特性而得:
式中:Eeb——牵引电机在电制动过程中反馈的电能;
v0、vt——电制动过程中的计算始末速度。
由式(3)可知,从动力学关系上,车辆产生的电制动能量总量主要由车辆自重、载客量、制动减速度决定,同时制动电能的产生受制动模式的影响。
1.2 基于供电网络关系的制动能量
牵引主电路与牵引网能量交换特性可表示为

式中:Ptot——车辆从牵引网取得的总功率;
Pmain——车辆牵引主回路消耗的功率。
当牵引加速过程中为正,电制动过程中为负值,当网压高于设定值(上海地铁网压设定值为1 800 V),转为电阻制动,此时Pmain计入电阻制动功率。Paux为辅助用电功率,运行过程中始终为正值。
取供电系统中的一个供电臂做研究,且认为其
两端的变电站端电压不受其它供电臂电流情况的影响,简化后的牵引网等效模型如图1所示。
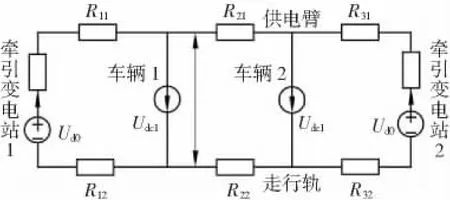
图1 牵引供电网络简图Fig.1 Electric network of traction system
供电臂阻抗R11、R21和R31以及走行轨阻抗R12、R22和R32都是车辆与变电站距离的线性函数。地铁车辆用受控电流源来代替,其电制动过程中向电网反馈的电功率可根据式(3)的数学模型进行车辆牵引计算得到。
基于车辆制动过程中的动力学及供电网络关系,车辆制动过程中产生的制动能量的大小与多种因素相关,如:车辆运行图编排,单车辆的载重与速度信息,制动模式和ATP防护模式,并且因素间存在耦合及相互约束关系,如图2所示。
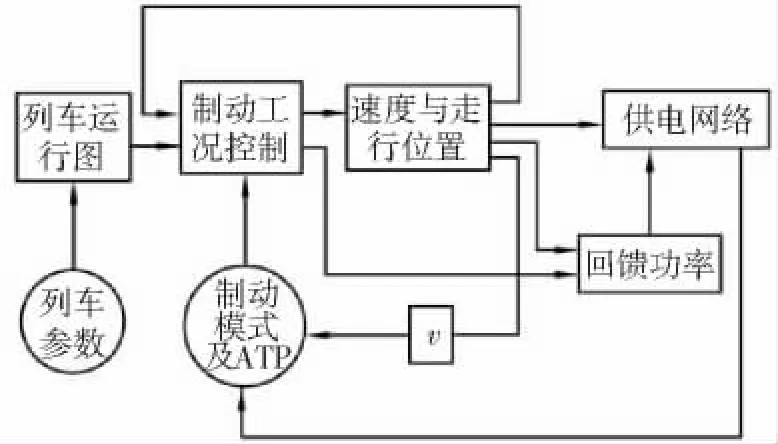
图2 制动能量产生因素约束Fig.2 Factors of braking energy
2 制动能量回收方法
2.1 实验系统
文中采用一种基于车载的脱网方式的制动能量回收系统,以超级电容为储能器件,回收不能回馈电网的即将发生电阻制动的那部分能量,并用于车厢辅助电路的供能,即式(4)中的Paux中的一部分。回收方法原理图如图3。
实验系统对应模拟上海地铁2号线6编组车辆使用的西门子车型牵引系统,4节动车,2节拖车,共16台牵引电机(每台190 kW)。实验室内选用低功率的30 kW交流异步电机来模拟实际地铁的牵引工况。整车辆近似看作单质点运动的情况下,将牵引转矩、整车惯量和运行阻力平均分配到每台牵引电机上,并按照19∶3的比例等比例减小。超级电容器组由若干单体容量为2 400 F的电双层电容器(EDLC:Electric Double Layer Capacitor)以串并联的形式组成。储能组件中的每组电双层电容器上均装有旁路电流达100 A的平衡电路板,以其均衡在串联工作状态下每支电双层电容器上的工作电压,保证电双层电容器的工作安全。储能单元提供给旁路开关两路DOWN和UP的干接点信号,其中DOWN干接点信号对应电双层电容器组工作起始状态,UP干接点信号对应电双层电容器组工作截止状态。其中,DOWN干接点信号对应电压可在一定范围内进行调节[4]。
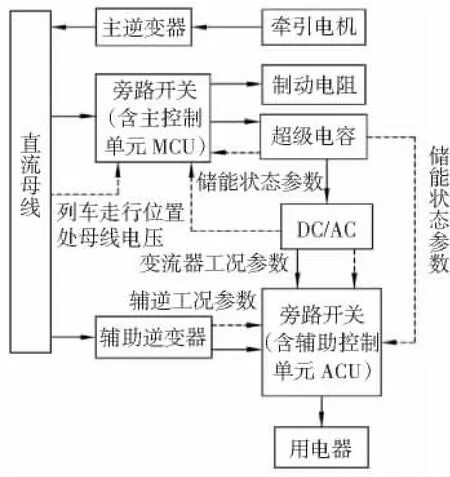
图3 制动能量回收方法原理Fig.3 Recovery principle of braking energy
2.2 实验结果与分析
制动能量与超级电容储存能量测试实验结果如图4~6所示。
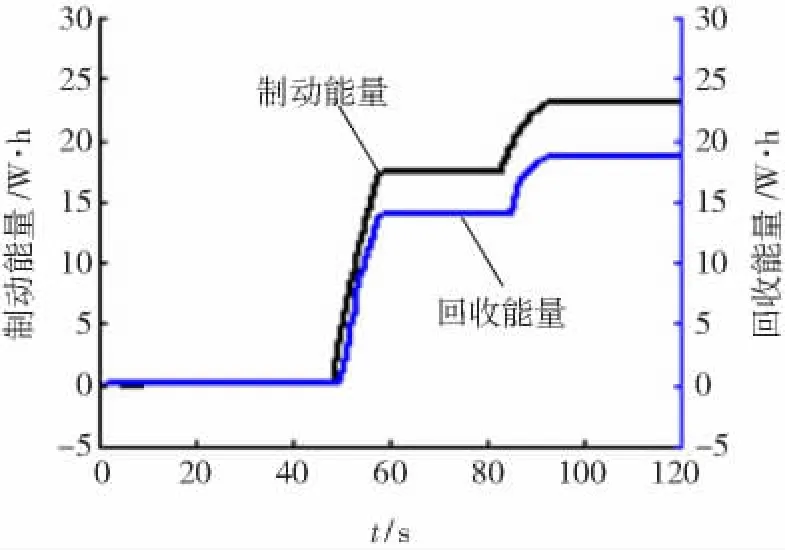
图4 轻载制动和回收能量Fig.4 Braking and recovery energy of light load
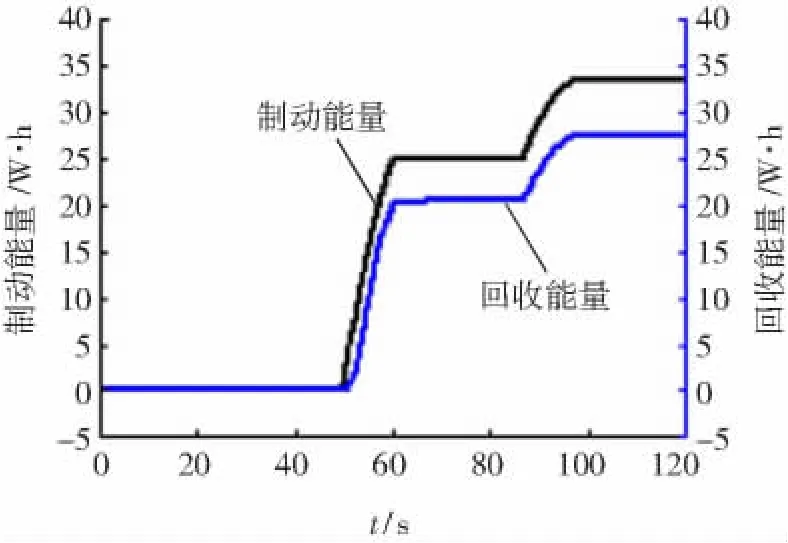
图5 满载制动和回收能量Fig.5 Braking and recovery energy of full load
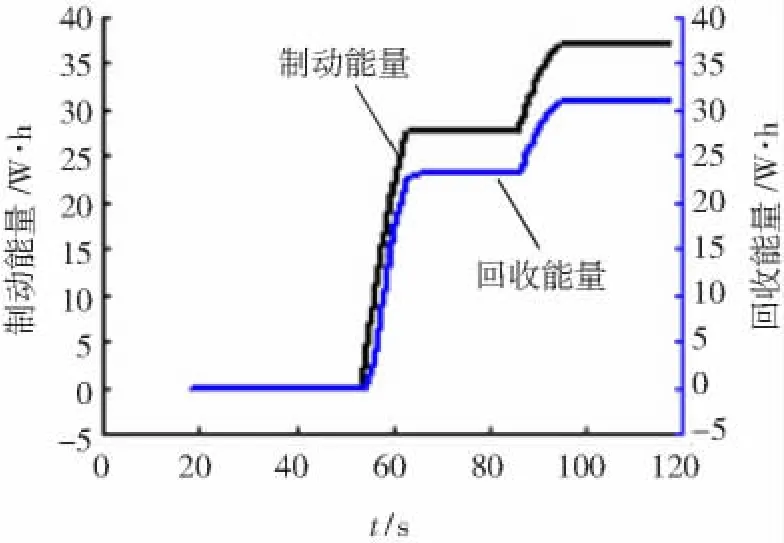
图6 超载制动和回收能量Fig.6 Braking and recovery energy of overload
由图可见,在55 s时开始制动,能量瞬时增加。能量的增加值和负载有关。轻载工况时,由于负载较小,能量增加值也相对较小;超载工况负载大,能量增加值也大。
图中的能量波形图有两次明显的能量上升拐点,代表两次明显的制动。第一段制动更为明显,第二段相对较弱。
测试图中的能量有效值的计算公式为

式中:u(t)——电压的瞬时值;
i(t)——电流的瞬时值;
Wp——正负电能总和。
测试中,三种工况下电制动总能量及超级电容所储存的能量如表1所示。
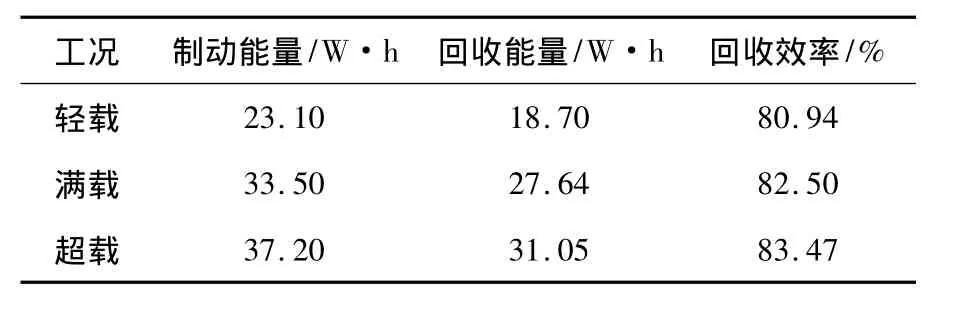
表1 各种工况下能量的回收效率Table 1 Recovery efficiency of braking energy
由于在直流脉冲能量转换器上(DC/DC)有一定的能量损耗,超级电容储存的能量要小于消耗在制动电阻上的能量。从图中也可以看出,由于直流脉冲能量转换器在吸收转换从变频器出来的能量时,需要一定的时间,故两种能量在时间轴上有一定的滞后现象,滞后时间约为2 s。ACU辅助控制技术对回收系统和原供电系统实现了无缝切换,且具有较好的稳定性和可靠性。
3 结束语
在分析城市轨道车辆制动能量特性的基础上,设计了基于车载储能方式的脱网式的能量回收实验系统。实验结果表明,利用该系统可以对城市轨道车辆制动能量进行有效回收,回收效率高达83.47%。但大功率条件下的变流技术、超级电容的储能均压技术以及如何提高能量回收系统的工作效率,将同样是亟待解决的关键技术。
[1]RUFER A,BARRADE P,HOTElLIER D.Power-electronic interface for a supercapacitor-based energy-storage substation in DC-transportation networks[J].European Power Electronics and Drives Journal,2004,14(4):43 -49.
[2]NANKYO M,ISHIHARA T,INOOKA H.Feedback control of braking deceleration on railway vehicle[J].Journal of Dynamic Systems Measurement and Control,2006,128(2):244 -250.
[3]许爱国.城市轨道交通再生制动能量利用技术研究[D].南京:南京航空航天大学,2009.
[4]杨 俭,李发扬,宋瑞刚,等.城市轨道交通车辆制动能量回收技术现状及研究进展[J].铁道学报,2011,33(2):26-33.
Recovery method of braking energy for urban railway vehicle
YANG Jian,SONG Ruigang
(School of Urban Railway Transportation,Shanghai University of Engineering,Shanghai 201620,China)
This paper is an attempt to address the waste of the braking energy such as occurs when a lot of electrical energy produced by the frequent braking process of the urban railway vehicles is often consumed in the form of breaking resistor due to the failure to fulfill the requirements of braking energy feedback to power grid.The paper describes the analysis of the characteristics and restrained conditions of producing braking energy of the urban railway vehicle by combining vehicle dynamics with power supply,proposes a novel recovery method of braking energy free from power grid on the urban railway vehicle and introduces the experimental research depending on an experimental system of braking energy recovery.The results show that the system is capable of an effective recovery of braking energy.
urban railway vehicle;braking energy;recovery method
U266.2
A
1671-0118(2012)04-0424-04
2012-06-30
国家自然科学基金项目(51075255)
杨 俭(1962-),男,黑龙江省哈尔滨人,教授,博士,研究方向:机电装备可再生能量回收技术,E-mail:yang2580@sues.edu.cn。
(编辑 晁晓筠)
猜你喜欢
煤气与热力(2021年6期)2021-07-28
煤气与热力(2021年4期)2021-06-09
房地产导刊(2020年8期)2020-09-11
奥秘(创新大赛)(2020年1期)2020-05-22
铁道通信信号(2020年8期)2020-01-05
小学科学(学生版)(2019年10期)2019-11-16
小哥白尼(趣味科学)(2019年12期)2019-06-15
铁道通信信号(2019年1期)2019-01-16
铁道通信信号(2018年6期)2018-08-29
通信电源技术(2018年3期)2018-06-26
