
地下工程事故紧急搜救的快速气冲钻孔和实时监测
2012-12-25 02:08:34岳中琦
黑龙江科技大学学报 2012年4期
岳中琦
(香港大学 土木工程系,香港,中国)
地下工程事故紧急搜救的快速气冲钻孔和实时监测
岳中琦
(香港大学 土木工程系,香港,中国)
如何以最快的速度搜救地下工程事故中的被困人员,是完成救援任务的关键,笔者提出了自动监测钻孔过程的DPM方法。该方法在以高压空气作为动力的潜孔锤旋转冲击钻孔中,能够自动、连续地对钻孔过程实时数字监测和记录。这种智能型监测钻孔可以实时建立沿钻孔深度各点的岩土体力学强度与空间分布,从而准确地测定地下洞室或巷道的位置及范围。该技术起到快速搜索以及输送新鲜空气的作用,钻成的孔洞可以将食物和水传递给被困人员。十多年来,实际数字钻孔监测结果表明,这项研究的确可以精确测定和给出地下岩土体的力学强度。该方法可以有效地、具体地应用到地下工程事故紧急搜救工作中。
钻孔监测;地下工程;紧急搜救;气冲钻孔;潜孔锤
0 引言
随着社会发展和人口增多,土地和矿产资源变得愈来愈重要。人类必须向地下要空间和开采矿产资源。在重力、地应力和高压气体等自然力和能量的作用下,地下工程会遇到各种困难,同时,也比地面工程更容易遇到形式多变的多种事故[1]。灾难偶有发生。例如,地下洞室和巷道可发生垮塌,造成地下或井下施工人员被堵埋在封闭空间中。记得2009年6月,我国某山区发生了一起意想不到的巨型高速山崩远程滑坡事件。位于山崩坡体下方的采矿巷道出口被大量山崩滑坡岩块碎石体掩埋,造成多名矿工被突然地埋在巷道内。各级政府和相关单位展开了紧急搜救工作。搜救人员用钻孔来寻找被埋的井下矿工们。媒体对这场援救工作做了及时报道。遗憾的是,众多努力还是没有找到被埋位置,也没有与被困矿工取得任何联系。痛定思痛,如何以最快的速度搜救井下被困人员成为援救任务的重中之重。
自1999年以来,笔者一直致力于直接、定量、准确地测量地下各类岩土地质体力学强度的空间分布研究[2-11]。地质岩土体的形成和演变历史漫长而多变,造成各种不同物理和力学性质岩土体的空间分布复杂和多样。在每一地下工程中,人们一般将岩土体划分成几类不同的岩石、岩体、土层、洞室和巷道。每一类岩石、岩体或土层具有相同或相类似的物理和力学材料性质。但是,由于不能透视到岩土体内部,所以必须建立各种测量及分析手段和方法,来定量测量和认识地下各类岩土地质体的准确空间分布。这些方法可分为直接和间接测量法。直接测量法是用某种手段直接接触、探到或看到场地岩土体内部的材料,包括钻探、标贯、静探、动探、旁压、载荷、现场直剪、十字板、钻孔弹模计和钻孔电视法。间接测量法是用某种方法间接地反算,得到场地岩土体内部材料的分布,例如波速、地电场、地磁场和重力场。直接测量法中的标贯、静探和动探不适用于岩层或硬土体。笔者提出和建立的方法是对传统的钻孔钻探方法的自动实时数字监测。产生这项创新研究的起因是,在1996~1998年,笔者参与了香港多项滑坡防治加固工程。在山地斜坡加固方法中,使用大量土钉加固。土钉加固的一项必须工序是在山坡岩土体中快速钻成φ100 mm,深为5~50 m,孔间距为1~3 m的孔洞。钻孔过程中,操作人员能够通过感觉来判断地下岩土体力学性质,对地下岩土体可做大致深度分类。笔者认为,钻孔是对地下岩土体的力学局部破坏测试。因此,监测相关的驱动力和运动学参数,一定可以更加准确地将地下岩土体进行力学强度分类,确定它们沿钻孔深度的空间分布。十多年来,实际数字钻孔监测结果表明,这项研究的确能够精确测定和给出地下岩土体的力学强度。
文中介绍一种如何利用自动监测钻孔过程快速得到沿钻孔深度的岩土体力学强度与空间分布的DPM方法。探讨如何将DPM法应用于对地下被埋人员的搜救准确度和快速度的实践中。
1 钻孔过程自动监测
1.1 钻孔机种类与结构性能
向地下岩土体钻孔的钻机种类很多。如图1所示,有大型履带运移式,也有手工运移式高压气流驱动的潜孔锤冲击钻。钻孔直径为6~300 cm,适用于不同的工程任务和目的,包括勘探、钻孔桩、掼入桩、土钉、斜排水孔、预应力锚杆和锚索。基本的钻孔方法有四种,即螺旋式钻孔、旋转式钻孔、冲击式钻孔以及冲击旋转式钻孔。螺旋式和旋转式钻孔可用液压驱动。冲击式和冲击旋转式钻孔可用电压或者气压流驱动。
图1a是用高压气体流来驱动潜孔锤冲击撞击和旋转破碎岩土体。图1b是用电压驱动旋转钻杆旋转带动潜孔锤头面旋转剪切岩土体,同时用高压气体流来驱动潜孔锤冲击撞击破碎岩土体。图2是高压气体流驱动的潜孔锤。它带有两个出气孔,以冲刷破碎岩土体,再将它们沿孔壁及钻头和钻杆间的空隙带飞出孔口外部到地表。潜孔锤是跟随钻孔深度不断进入、接触和破坏孔底岩土体。
高压缩空气流潜孔锤冲击钻孔机包括钻杆、潜孔锤钻头、机架及操作控制台四部分。机架又可进一步细分为旋转单元、传动齿轮、转滑机身及链条等几部分。该类钻机钻入岩土层的主要动力来源为钻头冲击力,辅以钻头的旋转和推进力量。冲击力将钻头前端的土或岩石打碎,旋转力进一步将土石破碎。高压缩空气流经主空气压力机输至操作控制台。操作控制台将进气管的高压空气流,根据需要分别导向五个分流气管,再分别输往机架和潜孔钻头。
不同的钻孔机有许多共同的基本操作和工作过程。主要包括钻杆和钻头的前进、停止、后退、前进旋转和后退旋转,以及用于控制钻杆和钻头的动态压力和荷载。这些参数(原始资料和数据)可以反映出钻机随时间变化的钻孔和操作过程。目前,在岩土工程及施工实践中尚未广泛对这些参数进行实时监测和利用。
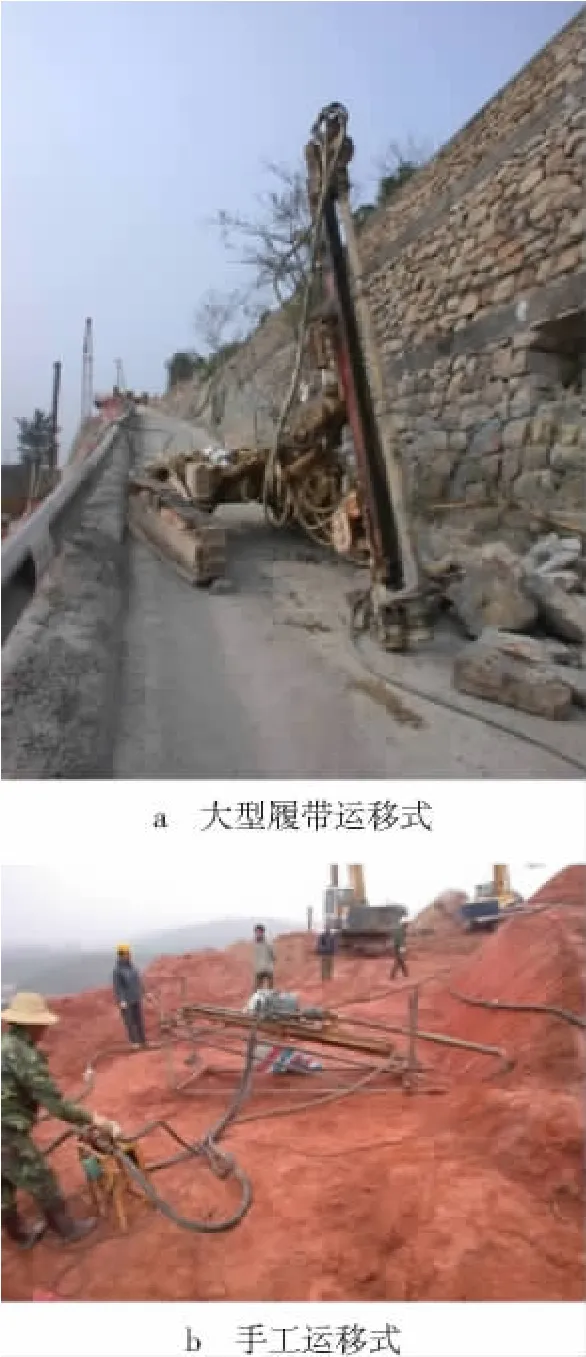
图1 高压空气流驱动的潜孔锤冲击钻孔设备Fig.1 Set up for compressed air-flow driven down-the-hole hammer percussion drilling
1.2 钻孔过程自动数字监测
鉴于钻孔技术在地表和地下工程中的广泛应用,笔者团队开发和研制出名为钻孔过程监测仪的设备。英文缩写DPM。该仪器能够自动地、连续地对钻机的各种动力和运动钻孔参数进行跟随时间的数字监测和记录。
图2可见该仪器的传感器安装在机架和控制台的情况。监测仪由传感器单元和数据处理单元组成。传感器单元安装在机架或控制台上,用于监测钻孔物理参数。运动传感器分别为钻机动力头位置和钻杆旋转传感器。前者用来监测钻机动力转滑机身在链条上的位置,从而掌握所用钻杆数量和每根钻杆长度,以及潜孔锤钻孔深度。后者用来监测潜孔锤钻头及钻杆的旋转速度。高压空气流驱动力传感器由5个空气压强计组成,见图3。用来监测潜孔锤和钻杆的冲击、前进、后退、正向与反向旋转五个操作时的工作空气流压强。

图2 高压空气流驱动的潜孔锤Fig.2 Compressed air-flow driven down-the-hole hammer

图3 潜孔锤旋转冲击钻孔的数字自动监测Fig.3 Set up for automatic digital monitoring of percussion-rotary drilling process driven
数据处理单元的组成部分安全可靠,以适用于现场的各种不利条件。由传感器直接输出的电压或电子脉冲信号,以选定的采样频率先传至便携式数据采集系统,然后储存并绘制于便携式计算机内或采集盒内。数据采样频率为每秒1~10次/s。
目前,自动数字钻孔监测仪已经在多项勘探岩土研究和工程中应用。
2 实测结果与分析
2.1 实测结果
在风化火山岩中,压缩空气流驱动的冲击旋转潜孔锤钻成深近26 m的钻孔过程自动记录结果见图4。该记录为测到的原始数据。这些原始数据可用于描述钻孔过程随时间的变化和地下岩土体抗钻强度随深度的变化。
图4由六条时间过程曲线构成[3]。第一条见图4a,为动力头相对于某固定点位置,在钢滑板上前后平行移动的时程曲线。其他五条时程曲线是五种压缩空气流压强随时间变化的全过程。所谓全过程是从钻孔潜孔锤进入岩土体开始,直至所有钻杆钻进孔内再到潜孔锤拔出完成钻孔为止。当钻孔深度达到或略微超过设计深度时,即开始从钻孔中一节节取出钻杆。
每节钻杆长度均为3 m。共用了8根钻杆和一根长度3 m的潜孔锤,见图4f中1~9数字。反转气压突然增大需要将钻杆反转将螺纹接头松开。在增加一根钻杆后,再用正转气压对钻杆正转,以将新加钻杆在两端分别同原来钻杆和动力头接口公母螺旋头接紧。

图4 动力头平移和五种控制气压随时间变化的全部钻孔过程Fig.4 Complete drilling process of chuck position and five control pressures of a compressed air-flow driven rotary percussive machine with down-the-hole hammer
从图4f中B时开始,钻孔过程为从孔中将8个钻杆和潜孔锤拉回到地面的过程。从图4a可见,每根钻杆钻进3 m的过程和用时不完全一样,钻进速度(单位时间的进深)也不一样。有的用时少,钻得快;有的用时长,钻得慢。同时,它们钻进所用的冲击、推进和正转高压缩空气流的压强在各个时间段相差不大。因此,这些时程曲线反映了地下岩土体的抗撞和抗转的强度。也就是说,钻得慢的强度高,钻得快的强度低。钻得时程曲线单一的岩土体相对均匀和完整。钻得时程复杂的岩土体相对细观不均匀和不完整。有塌孔时,钻得时程曲线一定复杂。
钻孔从早上9:49开始,到11:44结束。共用了2 h,完成26 m钻孔全过程。
2.2 抗钻强度沿钻孔分布
根据图4的原始数据,经过分析,可得到钻头在土体中的深度随时间的变化过程[5]。结果如图5所示。

图5 钻孔过程中潜孔钻头在岩土体中深度随纯钻进时间的变化过程Fig.5 Depth advancement of down-the-hole hammer bit in weathered soils and rocks with net drilling time
在风化火山岩土体中,潜孔锤钻头钻深随纯钻时间的变化曲线见图5。图5中时程曲线的坡度即为压缩空气流钻头在该孔岩土中的钻进速度。显然,钻头随时间的变化曲线可分5个大致线性区间来考虑:区间1(Zone 1)为表面风化土区CDV,平均钻进速度为1.611 m/min;区间2(Zone 2)为深部的完全风化土区CDV,平均钻进速度为1.162 m/min;区间3(Zone 3)为深部的弱风化火山岩区MDV,平均钻进速度为0.475 m/min;区间4(Zone 4)为深部的强风化火山岩区 HDV,平均钻进速度为0.786 m/min;区间5(Zone 5)为深部的微风化火山岩区SDV,平均钻进速度为0.291 m/min。其中,区间1又可分为4个子区间,有不同的钻进速度,表明这段土体含孤石。区间3也可分为3个子区间,有不同的钻进速度,表明这段弱风化岩体强度也是随深度变化的。区间4的3个子区间,有不同的钻进速度,表明这段强风化岩体中部夹一层完全风化土体CDV。这段夹层的平均钻进速度为1.297 m/min。
图5给出了增加8根钻杆的每根钻杆时间和深度,见图5中1~9数字点。从图5中可见,钻进速度不受增加钻杆的影响。换句话说,换每根3 m长钻杆位置前后的钻进速度(即时深曲线线性段的坡度)是不变化的,或者说变化很小。这也从另一个侧面反映了钻进速度的变化不受钻杆长度的影响,或影响很小。钻进速度的明显变化是岩土体强度、刚度或完整性变化造成的。总的纯钻时间为2 150 s约36 min。
图6为DPM钻头深度与其纯钻进时间的时深曲线和对应的岩土取芯照片及描述解释。这个结果由液压旋转加水降温取岩芯钻机测得。被钻进岩体为花岗岩,含全风化 CDG、强风化 HDG、弱风化MDG和微风化SDG花岗岩。其中,全风化CDG已成土体,遇到随钻水体而被水带走,没有能取到样。因此,它们在岩芯照片中为空缺,它们的钻进速度同其他岩石相比很快。根据DPM时深曲线变化可将这段风化花岗岩体化分为图6中的A到F 6个线性段。它们对应了这段花岗岩体的不同风化程度。其钻进速度可用图6中的Δh和Δt按照Δh/Δt计算得到。特别地,B和D段是没有岩芯的完全风化土体。

图6 液压旋转取岩芯结果和其钻头在岩土体中深度随纯钻进时间变化过程Fig.6 Rock core samples and their corresponding drill bit depth with net drilling time
笔者的合作者和研究生们,已将上述方法广泛应用于岩石土体的实际工程测量勘探中。这些岩土体包括花岗岩体、火山岩体、大理岩体、石灰岩、溶洞、砂岩体和各种土体。得到的结果都是一致的和定量的。因此,这种钻孔过程的自动连续数字监测是原位连续测量岩土材料抗钻强度与它们的地下空间分布。
值得一提的是,不同钻机和新老钻头的性能和功效可能有较大差异。这些差异可能造成同一岩石或土体的钻进速度的绝对值有不小的差别。这一困难可用多种方法克服和解决。第一,同一钻机的钻进速度是由岩体抗钻强度和完整度决定的。因此,同一钻机的时深曲线分层是可以的,不同钻机的时深曲线分层是一致的。因此,可以确定地下岩土体的相对强度分布。第二,可以用不同钻机来钻进同一种已知岩石或土体,可以找到它们钻进速度的相互对应关系。第三,也可用标准钻机来进行钻孔,得到的结果应该相互对应和一致。由于篇幅有限,不再逐一赘述,可参阅文献[2-5]。
3 地下工程事故紧急搜救
上述压缩空气流驱动的潜孔锤钻孔和钻孔过程自动数字监测,能够用于地下工程事故中的快速定量搜救。具体方法和思路如下:
第一,如果已开挖的洞室和巷道没有被垮塌岩土体填满,它们就是空洞。钻进速度将极其快,且所需驱动力极其小。因此,钻孔和监测可以发现它们所处的深度和长度。
第二,作为驱动力的高压缩空气流将从潜孔锤头的两个出气孔进入被封闭的地下空间,可以为被困人员带来新鲜空气流,给被困于封闭空间的人员提供氧气。
第三,高压缩空气流和潜孔锤冲击岩石有很大的响声,能较为容易地通知被困人员,他们也可敲击铁质潜孔锤和钻杆来回应外部钻孔搜救人员。钻成的孔洞也可将食物和水传递给地下被困人员。
第四,如果已开挖地下空间被垮塌岩土体填满,它们同围岩土体相比不一样,其钻空过程和速度有相当大的差别。因此,搜救人员可以确定垮塌空间范围,以利于再钻孔寻找被困人员。
第五,目前,高压缩空气流驱动的潜孔锤冲击钻孔的设备数量多型号齐全,价格不贵。在各种岩土体中的钻成孔速度非常快。动力大的钻机一天可以钻进300 m。这对紧急搜救十分重要。时间就是生命。搜救人员可在目标场地多做几个钻孔,快速确定和找到地下被困人员。
第六,搜救人员可以在平时对相关钻孔设备和数字自动监测设备操作熟练,对各种岩土体和空洞的钻孔响应有较好的了解和认识。这样,在紧急搜救时,可以做得更好,最大程度地减少人为失误。
4 结束语
笔者扼要地介绍了钻孔过程数字自动监测研究,以及基于此技术而建立的原位连续测定岩土体力学强度与空间分布的DPM方法。实例分析表明,该方法获得的钻孔过程动力和运动参数能精确实时地确定地下地质岩土体的力学强度和分布,以及空洞、溶洞分布。笔者认为,该方法可以有效地和具体地应用到地下工程事故中,用以紧急搜救被困人员。其六种具体搜救方法切合实际,希望这个设想能在将来地下被困人员紧急搜救实践中起到作用。
致谢
此文是基于2010年6月9~12日在北京举行的“第17届国际应急管理大会——暨应急救援成果与技术装备展”上,笔者应邀用英文作的题目为Automatic Monitoring of Down-the-Hole Hammer Drilling for Emergent Searching of Buried Underground Space学术报告。感谢香港特别行政区政府研究基金委员会项目No.HKU 7137/03E和国家973基础研究项目No.2011CB710600的部分资助。感谢多位研究生测试协助。感谢黑龙江科技学院在2011年8月给笔者提供的野外考察协助。
[1]岳中琦.深部工程岩爆、冲击地压、矿震、洞壁劈裂、围岩分区破裂和巷道大变形的一个可能共同力源和能源——岩石微量密封气体膨胀能[J].岩石力学与工程动态,2012(1):83-89.
[2]岳中琦,李焯芬,罗锦添,等.香港大学钻孔过程数字监测仪在土钉加固斜坡工程中的应用[J].岩石力学与工程学报,2002,21(11):1685-1690.
[3]岳中琦,郭建英,谭国焕,等.香港大学钻孔过程数字监测仪在自动化施工和设计中的作用[C]//中国建筑学会工程勘察分会.全国岩土与工程学术大会论文集:上册.北京:人民交通出版社,2003:147-155.
[4]岳中琦.锚固钻孔过程数字自动监测以优化岩土锚固[C]//中国岩石力学与工程学会.第八届全国岩石力学与工程学术大会论文集.北京:科学出版社出版,2004:879-886.
[5]YUE Z Q,LEE C F,LAW K T,et al.Automatic monitoring of rotary-percussive drilling for ground characterization-illustrated by a case example in Hong Kong[J].International Journal of Rock Mechanics& Mining Science,2004,41:573-612.
[6]YUE Z Q.Automatic drilling process monitoring for soil and rock strengths and their spatial distribution in ground[C]//Proceedings of the 2nd World Forum of Chinese Scholars in Geotechnical Engineering.Nanjing,China,August 22 -22,Inc,2005:85 -90.
[7]YUE Z Q,GAO W,CHEN J,LEE C F.Drilling process monitoring for a wealth of extra factual data from drillhole site investigation[C]//Proceedings of the 10th International Congress of the International Association of Engineering Geology(IAEG2006 Engineering Geology for Tomorrow’s Cities).Nottingham,United Kingdom,September,6-10,Inc,2006:5-746.
[8]YUE Z Q,CHEN J,GAO W.Automatic drilling process monitoring(DPM)for in-situ characterization of weak rock mass strength with depth[C]//Proceedings of the 1st Canada-US Rock Mechanics Symposium(Rock Mechanics:Meeting Society’s Challenges and Demands).Canada,editors:Erik Eberhardt,Doug Stead,&Tom Morrison,Vancouver,27 - 31,2007,Taylor & Francis,London.Inc,2007,1:99 -206.
[9]YUE Z Q,CHEN J,GAO W.An innovative approach combining geological mapping and drilling process monitoring for quantitative assessment of natural terrain hazards[C]//Proceedings of the 10th International Symposium on Landslides and Engineered Slopes.June 30 ~July 4,2008,Xi’an,China,Inc,2008:535 -541.
[10]YUE Z Q.Automatic monitoring of drilling process for mechanical profiles of grounds composing both soils and rocks[C]//Proceedings of the 4th Japan-China Geotechnical Symposium.Okinawa,Japan,April 12-14,Inc,2010:230-235.
[11]YUE Z Q.Optimization of pre-stressed ground anchors or groutin-type soil nails with drilling process monitoring[C]//Proceedings of the Third International Conference on Geotechnical Engineering for Disaster Mitigation and Rehabilitation(3ICGEDMAR 2011)togetherwith theFifth InternationalConference on Geotechnical and Highway Engineering-Practical Applications,Challenges and Opportunities(5ICGHE).Semarang,Indonesia,May 18-20,Inc,2011:573-578.
Monitoring and air-driven fast-track drilling designed for emergent searching and rescuing operation in buried underground space
YUE Zhongqi
(Department of Civil Engineering,University of Hong Kong,Hong Kong,China)
This paper presents a brief idea for an effective searching and rescuing people trapped in sealed underground spaces such as caverns and tunnels due to collapse of surrounding rock and soil masses.The idea is based on the fast construction hole drilling and its automatic digital monitoring.The drilling device is the compressed air-flow driven percussive-rotary drilling associated with a down-the-hole hammer.The drilling process monitoring allows an accurate and effective delinearing of the soil and rock strength and quality along the drill hole in real time,thus making it possible to quickly determine the location of the buried underground space and reach the people in the underground space,with the result that the compressed air-flow can flow into the buried underground space through the holes in the bit of the hammer.It follows that the method can come into effective and practical use for emergent searching and rescuing people trapped in buried underground space.
drilling process monitoring;compressed air-flow;underground space;rescuing;downthe-hole hammer
TD771
A
1671-0118(2012)04-0403-06
2012-06-09
香港特别行政区政府研究基金委员会项目(HKU 7137/03E),国家重点基础研究发展计划(973计划)项目(2011CB710600)
岳中琦(1962-),男,安徽省宣城人,博士,研究方向:地质灾害防治,E-mail:yueqz ATqhku.hk。
(编辑 徐 岩)
猜你喜欢
汕头大学学报(人文社会科学版)(2023年10期)2023-06-06 22:15:07
冶金设备(2021年2期)2021-07-21 08:44:22
制造技术与机床(2019年8期)2019-09-03 01:14:28
中南大学学报(自然科学版)(2016年2期)2017-01-19 07:37:05
凿岩机械气动工具(2016年1期)2016-11-11 07:33:37
凿岩机械气动工具(2016年1期)2016-11-11 07:33:36
凿岩机械气动工具(2016年1期)2016-11-11 07:33:35
设备管理与维修(2016年7期)2016-04-23 06:51:39
大型铸锻件(2015年4期)2016-01-12 06:35:13
地矿测绘(2015年3期)2015-12-22 06:27:25
