
三相电压型PWM整流器无源性分析及自适应控制
2012-12-14 07:38张文娟
电气自动化 2012年4期
张文娟
(宝鸡文理学院 电子电气工程系,陕西 宝鸡 721007)
0 引言
三相电压型PWM整流器(VSR)具有输入电流正弦、功率因数可控、能量双向流动、直流母线电压恒定及抗负载扰动能力强等优点获得广泛的应用[1]。PWM整流器控制可分为线性和非线性两种[2,3]。无源性控制与 LyaPunov函数密切相关,成为 PWM整流器非线性设计的新途径。国外学者Ortega R[4]等将无源性理论应用于PWM控制中,但该控制未考虑整流器交流侧电感电阻、开关器件等等效电阻变化产生的影响,而无源性阻尼注入与交流侧等效电阻大小密切相关,一旦整流器中交流侧电阻大小变化而阻尼注入不变,则系统将产生稳态误差问题。针对于此,本文将自适应方法引入到无源控制中,设计整流器交流侧等效电阻自适应辨识环节,有效抑制电阻变化引起的电压、电流跟踪误差。
1 电压型PWM整流器Euler-Lagrange(EL)模型
三相电压型PWM整流器的拓扑结构如图1所示[5]。ua、ub、uc是三相电网电压,va、vb、vc为交流侧输入电压,L为电抗器的电感,R为交流侧等效电阻 (R=Rs+Rg,Rs为电抗器等效电阻,Rg为开关器件等效电阻),C为直流侧电容,Vdc是直流电压,RL为负载电阻。
一个系统的能量(或无源)特性,并不会因所选状态变量、参考坐标系或数学模型表达式的不同发生变化[6]。在本文的设计中,选用d-q坐标系,此时PWM整流器的状态方程为[7]:
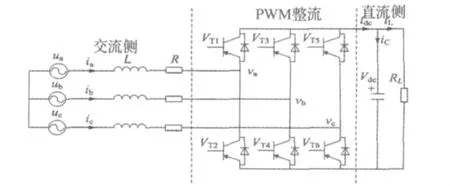
图1 三相电压型PWM主电路

其中:

为整流器阻尼矩阵;u=[udup0]T为 d-q坐标系下电网电压;x=[idiqVdc]T为d-q坐标系下交流侧电流及直流母线电压;Sd、Sq为d-q坐标系桥臂开关函数。
2 无源电流控制器的设计
步骤1:注入阻尼,使PWM整流器严格无源。

φ为扰动量,其形式为:

为了使误差状态方程尽快收敛到0,采用阻尼注入法[8],设阻尼矩阵为:

则(3)式转化为:

令Ren=R+Ra为系统耗散矩阵,通过选取输入使得

步骤2:根据控制目标,求得状态变量期望值。
三相电压型PWM整流器的控制目标为:① 稳定直流母线电压等于给定值;② 实现网侧交流侧电流正弦及单位功率因数运行。根据上述目标可得状态变量期望值为电网相电压幅值),(Im为交流侧电流幅值),稳态运行时,交直流侧能量达到平衡,即:

解得Im为:

步骤3:无源控制器设计。
根据(4)式,得注入阻尼后的无源控制率为:

将(8)式代入(1)中,考虑 M·xref=0,上式可化简为:
解得无源电流控制率为:

3 自适应无源控制器的设计
实际运行中,三相PWM整流器进线电抗器发热会导致其等效电阻Rs产生变化,加之开关器件等效电阻Rg的不可测性,致使交流侧总的等效电阻R=Rs+Rg不确定性[9]。由(4)式知,R的不精确性直接影响阻尼电阻注入大小,导致(10)式中无源电流控制率存在误差。为此设计自适应无源控制器。
设θ=θ(t)是未知时变的交流侧等效电阻增益,则实际交流侧等效电阻为=Rθ(t)=Rθ,误差阻值为 ΔR=Rθ-R=R(θ-1),结合(1)式,考虑电阻变化后PWM整流器的状态方程为:

将V沿式(11)轨迹微分得:

将 ΔR=Rθ-R=R(θ-1)代入(12)式化简得

4 在线仿真结果验证

图2 无源性控制整流器仿真结果
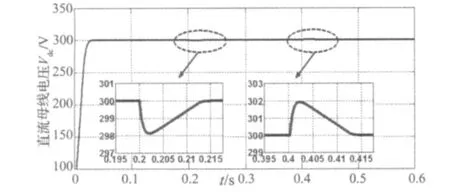
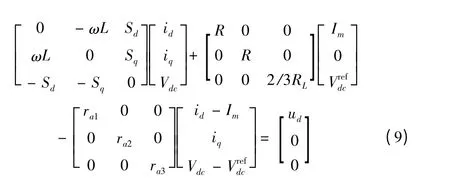
图3 负载突变时直流母线电压及其放大
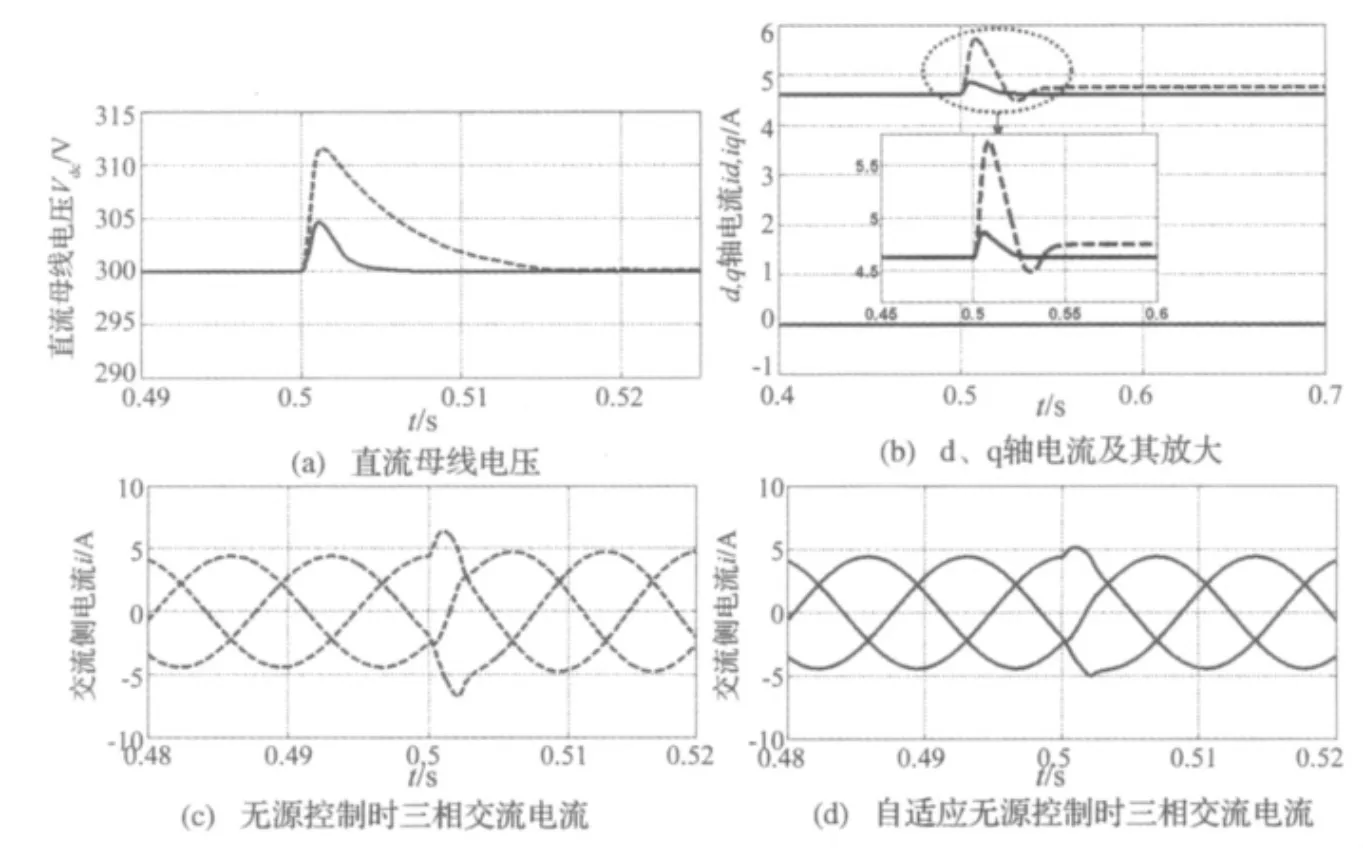
图4 交流侧等效电阻突变时整流器仿真结果
在MATLAB中建立三相PWM整流器无源电流控制率仿真模型。整流器参数为:电网相电压有效值120 V,进线电抗器电感5 mH,交流侧等效电阻0.1 Ω,直流母线电压300 V,直流电容3 000 uF,负载电阻80 Ω。根据(7)式求出当系统达到平衡点时有功电流的理论值Im=4.5 A。控制器参数ra1=ra2=ra=10 Ω。
4.1 系统有效性验证
图2所示为无源性控制时PWM整流器仿真结果,可以看出,直流母线电压经过短暂调节,能快速稳定到给定值Vrefdc;网侧输入电流波形呈正弦化,与电网电压同相位实现了单位功率因数运行;有功电流id能迅速稳定到理论计算的期望值Im,无功电流iq稳态时为0,这些均表明整流器在满足设计要求的同时具有良好的动静态性能,验证了无源控制器设计的正确性。
负载突变时直流母线电压及局部放大如图3所示(0.2 s时负载由 80 Ω 突变为 40 Ω,0.4 s时由 40 Ω 突变为 80 Ω)。可以看出,在负载剧烈变化的情况下,母线电压可以极为快速、无差的跟踪给定值。
4.2 自适应控制率验证
假设经过0.5 s的运行后,交流侧等效电阻变为1.5 R,图4所示为两种控制策略下,直流母线电压、有功、无功电流的d、q轴分量及三相交流电流的局部放大图。其中虚线所示为无源性仿真结果,实线所示为加入了自适应控制的仿真结果。从比较图可知,在交流侧等效电阻不变的情况下,无源性控制展现出良好的控制效果;但在交流侧等效电阻变化较大时,直流母线电压和有功电流的跟踪误差变得无法接受(Vdc的跟踪误差达到11.8 V)。自适应控制器的引入,在整流器参数受扰后能迅速消除稳态误差,且暂态调节超调小、无振荡。
5 结束语
无源性控制是一种全局定义且全局稳定的控制方法。将无源性理论应用于三相电压型 PWM整流器控制,利用 Lyapunov理论分析了PWM整流器的无源性,设计了对整流器交流侧等效电阻不确定性具有鲁棒性的无源自适应控制律。理论及仿真结果表明该控制方案保证直流母线电压、交流侧电流全局稳定跟踪,无输入输出线性化解耦奇点问题,同时对整流器交流侧等效电阻变化具有很强的鲁棒性。
[1]张文娟,高勇,马浩淼,等.PWM整流器虚拟电网磁链振荡性能改善[J].电机与控制学报,2010,14(7):23-28.
[2]宋金梅,王波.两种PWM整流器控制策略之比较[J].电气自动化,2009,31(5):30-32.
[3]赵葵银.PWM整流器的模糊滑模变结构控制[J].电工技术学报,2006,21(7):49-53.
[4]Ortega R,Van Der Schaft A.J.Maschke B,et al.Interconnection and damping assignment passivity-based control of port-controlled Hamiltonian systems[J].Automatica,2002.38:585 - 596.
[5]康忠健,陈天立,李丹丹.基于模糊控制的双闭环 PWM整流器[J].电气自动化,2009,31(5):24-27.
[6]高勇,张文娟,杨媛,等.基于无源性的变速恒频双馈风力发电机控制系统[J].电工技术学报,2010,25(7):130-136.
[7]乔树通,姜建国.三相 Boost型 PWM整流器输出误差无源性控制[J].电工技术学报,2007,22(2):68-72.
[8]Marino R,Tomei P.Nonlinear control design[M].New York:John Wiley & Sons Inc.1995:122-165.
[9]周鑫,郭源博,张晓华,等.基于自适应跟踪控制的三相电压型 PWM整流器[J].中国电机工程学报,2010,30(27):76-82.
猜你喜欢
科学家(2021年24期)2021-04-25
电子制作(2019年12期)2019-07-16
自动化与仪表(2018年7期)2018-07-31
北京航空航天大学学报(2017年6期)2017-11-23
互联网天地(2016年2期)2016-05-04
通信电源技术(2016年4期)2016-04-04
电源技术(2015年1期)2015-08-22
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年13期)2015-04-09
电测与仪表(2015年12期)2015-04-09
