
单基线载波相位双差定位、位置差分和单点定位的精度分析
2012-12-11 06:07王霞迎秘金钟
测绘通报 2012年1期
王霞迎,秘金钟
(中国测绘科学研究院,北京100830)
一、引 言
GPS由于其高精度、全天候、实时性、无通视条件限制等优点,已经广泛应用于GPS数据处理当中。GPS原始测量数据受接收机钟差、对流层和电离层误差、多路径效应、卫星轨道等误差的影响,数据处理中需对这些误差加以改正,而GPS载波相位双差处理的方法消除了其中的大部分误差,较为实用。现对载波相位双差模型、结果分析、注意问题逐一论述。
二、载波相位双差模型
观测方程的一般形式为

式中,i为测站;j为卫星。
基线向量的单差为
基线向量的双差(测站间求差,卫星间求差)为

以式(2)作为观测方程,组成法方程,未知数为测站坐标和整周模糊度。
三、数据处理及结果分析
基准站采用北京房山IGS站的观测数据,流动站采用位于中国测绘科学研究院的流动站,分析了30 min的观测数据,采样率为15 s,两个测站在整个观测过程跟踪了7颗共视卫星。下面分别对载波相位双差观测结果(如图1~图3所示)、位置差分[1](如图4~图6所示)、单点定位(如图7~图9所示)结果分析。

图1 载波相位双差X方向的偏差
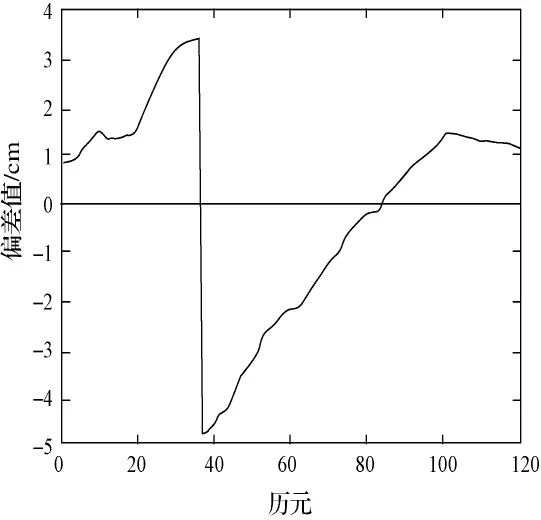
图2 载波相位双差Y方向偏差
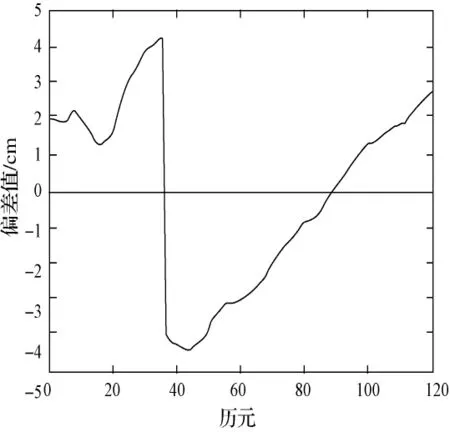
图3 载波相位双差Z方向偏差

图4 位置差分X方向偏差
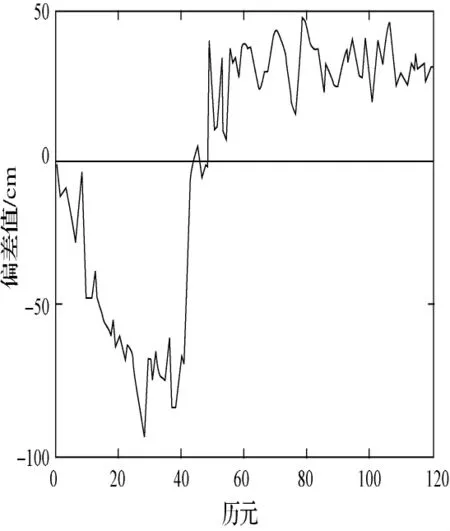
图5 位置差分Y方向偏差

图6 位置差分Z方向偏差

图7 单点定位X方向偏差

图8 单点定位Y方向偏差

图9 单点定位Z方向偏差
由图中可得,载波相位双差X方向数据误差较小,Y和Z方向在将近第40历元的时候出现大的突变,整体还是控制在5 cm以内,已经满足在大多数工程的数据解算要求。同时,与位置差分、单点定位相比,其结果精度大大提高。
四、注意问题
1.基线长度限制
对于短基线(<20 km),信号传输过程误差(如对流层、电离层)、接收机钟差、卫星钟差、卫星轨道误差大部分可以消除,并求解整周模糊度,可以提高测站的定位精度。但是对于较长基线,模糊无需求整,可直接用作浮点解来代入法方程求解测站位置。
2.起算点坐标
基准站起算坐标的精确与否直接关系到流动站测站坐标的解算。因此,为了保证结果的准确性,使用国家级控制点,或预先使用接收机在基准站较长时间观测求解起点坐标。
3.卫星高度角的选择
为了尽量避免多路径效应的影响及卫星几何强度较差,通常选取的卫星高度角要大于15°。
4.参考卫星的选取
在组成误差方程时,选择每个历元中卫星高度角都较大的一个最优参考星,通常要大于70°。
5.观测时段的选取
观测时段不宜过长,以15min~30min为宜,时间过短多余观测不足,时间过长则前后相关性减弱。
6.评定精度
短基线解算中评定指标有:PDOP、VDOP、HDOP、中误差。
1)PDOP:模糊度次优解与最优解之比,反应卫星的分布情况。
2)VDOP:垂直精度因子,反应测站坐标垂直方向的误差。
3)HDOP:水平精度因子,反应测站坐标水平方向的误差。
4)中误差:反应观测误差对测站坐标精度的影响。
五、结束语
本文对位置差分和双差载波相差分两种进行编程实现,并对比了3种方法解算结果精度,证明了载波相位双差的精度较高。简述了在编写程序中遇到的问题,并提出合理的建议,希望为载波相位差分程序提供一些帮助。
[1]党亚民,秘金钟,成英燕.全球导航卫星系统原理与应用[M].北京:测绘出版社,2007年.
[2]蔡艳辉,程鹏飞,李夕银.整周模糊度去相关的两种实现方法[J].测绘工程,2003,12(4):36-38.
[3]刘大杰,施一民,过静君.全球定位系统(GPS)的原理与数据处理[M].上海:同济大学出版社,1997.
[4]TEUNISSEN P.G.The Least-square Ambiguity Decorrelation Adjustment:A Method for Fast GPS Integer Ambiguity Estimation[J].Journal of Geodesy,1995,70(1-2):65-82.
猜你喜欢
地理空间信息(2022年11期)2022-11-26
北京大学学报(自然科学版)(2022年4期)2022-08-18
大地测量与地球动力学(2022年1期)2022-01-11
中国惯性技术学报(2020年2期)2020-07-24
山东冶金(2019年5期)2019-11-16
测绘学报(2018年10期)2018-10-26
城市勘测(2018年1期)2018-03-15
测绘通报(2017年10期)2017-11-07
测绘学报(2017年4期)2017-05-12
山东工业技术(2016年15期)2016-12-01
