
改进的矩匹配遥感影像条带噪声去除方法研究与实现
2012-12-11 06:08杨冀红史良树
测绘通报 2012年1期
杨冀红,战 鹰,史良树,张 超
(1.中国土地勘测规划院,北京100035;2.中国农业大学 信息与电气工程学院,北京100083)
一、引 言
在遥感传感器成像过程中,条带噪声是一种周期性的重复出现于影像中的噪声现象,它往往是由于传感器CCD光学性质的差异、扫描机械运动、传感器平台等多方面的原因引起的[1]。条带噪声的存在影响了影像的应用,需要首先对影像进行去条带处理。去除条带噪声主要有两种方法。第1种方法是,由于条带是周期出现的,所以可通过构造消除一定频率特征的滤波器来滤除条带噪声[2,3],这种方法的优点是可用于几何校正后的影像,而且适用于小影像,但是,滤波器使得影像平滑,从而不利于分类、目标识别等影像应用;第2种方法,基于假设每个传感器单元获得的影像具有统计一致性,根据每个传感器单元获得的影像子集的DN(digital number)统计分布,并根据某一参考的分布对其进行调整,常用的方法有归一化方法[4-5]、直方图匹配法[6]和矩匹配方法等,但是直方图匹配方法有边界效应。文献[7]将直方图匹配和滤波结合。文献[1,8,9]研究了矩匹配及其改进方法,该方法可以减少这种边界效应[6]。本文首先对矩匹配方法进行了改进,并在VC++6.0下实现了改进的矩匹配方法,以IRS影像为例,与均值归一化方法进行了条带噪声去除效果对比分析。
二、均值归一化方法
该方法假定传感器扫描成像是在无任何辐射影响的理想状态下,并且扫描获取的影像数据足够长时,各不同视场角在飞行方向的一列数据的均值应该相等或相近[5]。而一般的遥感影像满足前两项假设。
该方法对影像在遥感卫星或航拍飞机飞行方向(列)进行累加并求平均,得到垂直飞行方向的每一个探测器像素的统计平均值,根据飞行方向的统计相似性,认为垂直飞行方向的每个像素的统计均值是相等的。所以,可以认为该统计均值便是垂直于飞行方向的每个像素的辐射响应,对统计均值进行归一化处理,便可得到辐射校正的结果,同时去除了影像的条带噪声。具体算法如下。
遥感卫星传感器扫描获得的某波段影像为

式中,n为影像列数;m为影像行数。对Inm按列求均值得行向量。

亮度值DN的平均值向量M反映这种倾向性差异和边缘辐射差异的综合趋势。以综合趋势M为依据,以每个传感器单元获得影像的均值的中值mmiddle为标准,即以m1,m2,…,mm的中值为标准,对其余各列像元进行辐射校正。则有校正后某波段影像为
三、改进的矩匹配方法
在遥感传感器扫描成像过程中,如果每一个传感器感应单元感应的DN值和实际辐射量之间的差异可以用增益和偏差来表示,这时DN值和实际辐射量之间是一种线性关系。这样,可以对每一个传感器单元获得的一列数据用均值作为偏差和标准差作为增益来调整,这就是矩匹配方法[1,8]。矩匹配方法也对影像数据有一个基本的假定条件:理想成像条件下,只要影像在飞行方向有足够多的扫描线,可以认为影像矩阵在飞行扫描方向的每列数据的统计均值和标准差是相等的,即飞行方向每列数据的均值(偏差)和标准差(增益)的差异是由于辐射差异造成的[5]。与均值归一化方法相比较,它不仅考虑了均值差异因素,还考虑了标准差的差异,与实际误差产生的情况更吻合。
对于任意一个波段的遥感影像,可以计算飞行方向一列数据(一个波段)的辐射值/DN值的均值和标准差,而将标准差等效为辐射响应的增益,将均值等效为偏差,如公式(4)所示


本文对具体参数计算方法进行了改进。在计算每列数据直方图的基础上,按一定比例去除直方图两端异常数据,然后计算每列的均值和标准差。对每列的均值和标准差进行排序,中间值作为校正的参考均值和标准差。
四、方法实现与对比分析
本文在VC++6.0下实现了均值归一化和改进的矩匹配的条带噪声的去除算法。改进的矩匹配的算法实现过程如下:
1)读取有条带噪声影像,得到一个影像数据矩阵;
2)去除相关的辅助数据及无效数据;
3)计算飞行方向各列数据直方图,本文采用的IRS5.8m分辨率全色影像,影像大小为4096像素×13 453像素,得到每列数据的直方图;
4)去除直方图低端和高端各1%的数据,如果异常数据概率较大,增大到2%;
5)针对每一个直方图,计算截取后直方图的均值和标准差;
6)将计算的均值和标准差数据进行排序,取均值和标准差的中间值为参考的均值和标准差;
7)利用均值和标准差数据进行校正,具体计算公式如式(4)所示;
8)将去除条带噪声辐射校正好的影像数据输出文件。
改进的矩匹配方法在VC++6.0下实现的流程图如图1所示。
本文所采用的数据是2000年5月23日获取的北京市房山地区的印度遥感卫星(Indian Remote Sensing Satellite,IRS)提供的全色5.8 m分辨率影像,影像大小为4096像素×13 453像素。如图2为本文采用的IRS遥感影像的一部分,可以看出有明显的条带噪声。
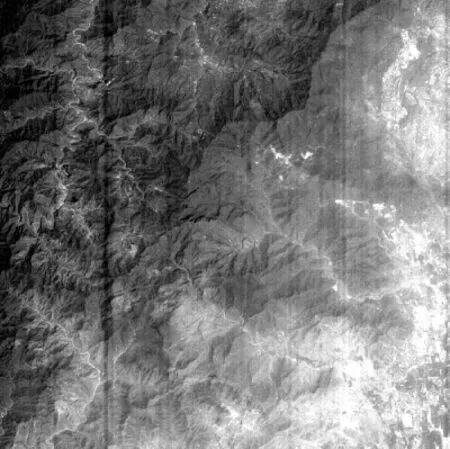
图2 有条带噪声的IRS图像
图3为用均值归一化方法处理的结果,可以看出影像中的条带噪声已经基本去除,但是影像的左下角和实际不符的病态斑块,而且影像右侧整体变暗,影响影像整体视觉效果。从图4中的直方图中也可以看出,均值归一化方法处理结果出现了一些零值。图4为改进的矩匹配方法处理后的结果影像,在很好地去除了条带噪声的同时,克服了均值归一化方法的缺陷。图5为三者的统计直方图,raw为原始影像直方图,可以看出原始影像的DN值分布在80到170很窄的范围,mean为均值归一化处理后影像的直方图,moment为经过改进的矩匹配方法处理后的影像直方图。改进的矩匹配方法或者均值归一化方法处理后,在去除了条带噪声的同时,对影像进行了辐射校正,得到拉伸后的辐射亮度。从图4可以看出,经过改进的矩匹配方法处理后的影像的统计直方图的形状相似于处理前,都接近于正态分布。所以,经过改进的矩匹配方法处理,不但去除条带噪声,并且很好地保持了影像的光谱特性。
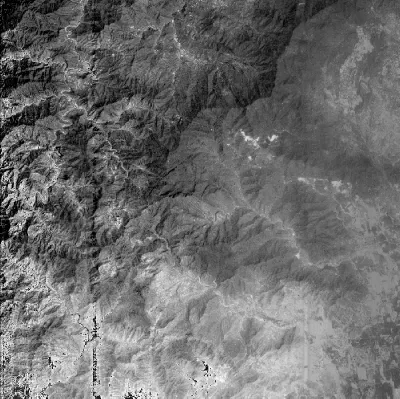
图3 均值归一化去噪的结果
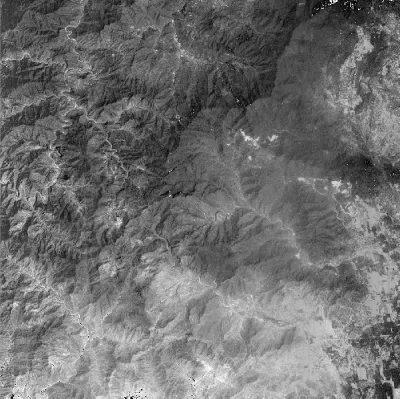
图4 矩阵匹配方法的去噪的结果
五、结束语
由于探测器各像元的非均匀响应,造成了影像条带噪声。这种现象在卫星遥感扫描成像和航空扫描成像都不可避免。本文在VC++6.0下实现了基于统计一致性的均值归一化方法和改进的矩匹配方法,通过对有条带噪声的IRS影像的处理效果的对比分析,对去除条带噪声和影像的光谱特征进行综合考虑,得出改进的矩匹配方法更优。该算法不但可以用于遥感影像的去条带噪声,同时也可用于去除普通CCD扫描仪由于探测单元的不均匀响应造成的扫描影像条带噪声。
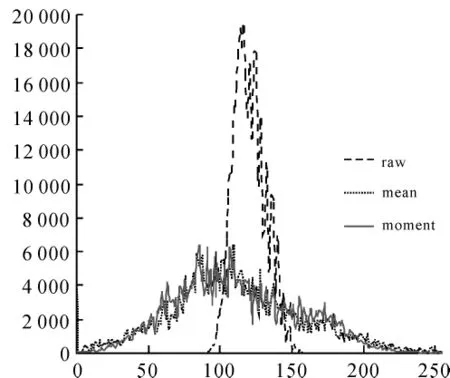
图5 三者对比直方图
[1]刘正军,王长耀,王成.成像光谱仪图像条带噪声去除的改进矩匹配方法[J].遥感学报,2002,6(4):279-284.
[2]石光明,王晓甜,张犁,等.基于方向滤波器消除遥感图像孤立条带噪声的方法[J].红外与毫米波学报,2008,27(3):214-218.
[3]HUANG P S,SU SC,TU T M.A Destriping and Enhancing Technique for EROS Remote Sensing Imagery[J].Journal of Chung Cheng Institute of Technology,2004 ,32(2):1-14.
[4]基于灰度归一化的 HJ-1A星 HSI图像条带噪声去除方法[J].国土资源遥感,2012,93(2):45-49.
[5]刘良云.高光谱遥感在精准农业中的应用研究[R].北京:中国科学院遥感应用研究所,2002.
[6]WEGENER M.Destriping Multiple Sensor Imagery by Improved Histogram Matching[J].International Journal of Remote Sensing,1990,11:859-875.
[7]宋燕,刘团结,丁赤飚,等.一种直方图匹配和线性空间滤波相结合的条带噪声去除方法[J].测绘科学,2009,34(5):94-96,115.
[8]GADALLAHE F L,CSILLAG F SMITH E JM.Destriping Multisensor Imagery with Moment Matching[J],Int.J.Remote Sensing,2000,21(12):2505-2511.
[9]郑逢斌,支晶晶,高海亮,等.一种高光谱图像条带噪声去除改进算法[J].测绘科学,2009,37(5):265-267.
[10]董广香,张继贤,刘正军.CHRIS/PROBA数据条带噪声去除方法比较[J].遥感信息,2006,6:36-39,49.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
当代医药论丛(2021年3期)2021-03-17
山西地震(2019年1期)2019-03-20
摄影之友(影像视觉)(2018年12期)2019-01-28
初中生世界·八年级(2017年3期)2017-03-24
新农业(2016年23期)2016-08-16
潍坊学院学报(2016年6期)2016-04-18
系统工程与电子技术(2016年2期)2016-04-16
中国光学(2015年1期)2015-06-06
赤峰学院学报·自然科学版(2015年15期)2015-03-21
