
RTK任意基准站技术的原理与应用
2012-12-11 06:06丁克良
测绘通报 2012年1期
张 萌,丁克良
(北京建筑工程学院,北京100044)
一、前 言
GPS-RTK技术是一项实时载波相位差分定位技术,它能够实时地为用户提供移动站在指定坐标系统下的三维坐标,且能够达到厘米级精度[1]。RTK测量具有定位精度高、布点灵活、测量时间短、测站间无需通视等优点,因此目前广泛应用于测图、放样以及图根控制控制等测量作业中。但是在以往的RTK测量工作中,基准站都要求架设在测区的已知控制点上,这样设置会引起许多问题[2]:①架站必须严格对中、整平,同时量取仪器高,较为繁琐;②如果控制点环境不好,则可能不适宜架设基准站;③如果控制点离测区相对较远架设则基准站会比较麻烦。基于这些问题,许多学者和工程技术人员对测量过程中基准站的设置问题作了许多探索[3-4],并最终探索出RTK任意基准站技术,解决了测量过程中基准站的设置问题。RTK任意基准站技术即在RTK架设基准站时,基准站不必架设在已知点上,根据具体情况可以选择空旷视场好,且位置较高的地方架设基准站。RTK任意基准站技术是RTK测量中的一项简单实用的技术,但是应用过程中很多测量工作人员并不太清楚其原理。因此本文在介绍传统的RTK的原理和经典的操作方法的基础上,着重对RTK任意基准站技术的原理和实现方法进行阐述,最后以实际参与的工程项目为例进行验证,并得出一些有益的结论。
二、GPS-RTK基本原理及做法
RTK(real time kinematic)技术是一种利用GPS载波相位观测值进行实时动态相对定位的技术(如图1所示),它是GPS技术和数据传输技术的结合。基本原理是:将一台接收机置于基准站上,另一台或几台接收机置于载体(称为流动站)上,基准站和流动站同时接收同一时间、同一GPS卫星发射的信号。基准站通过其发射数据链把所接收的载波相位信号(或载波相位差分改正信号)发射出去,流动站在接收卫星信号的同时也通过数据链接收基准站的信号,然后数据处理软件就可以实现差分计算,从而精确地确定出流动站的实时位置,定位精度可达到厘米级。RTK差分有两种定位方法:改正法和求差法[5],前者是基准站将载波相位的改正量发送给移动站,对移动站的载波相位进行改正,然后求解其空间坐标;后者是将基准站的载波相位发送给移动站,并由移动站将观测值求差进行坐标解算。
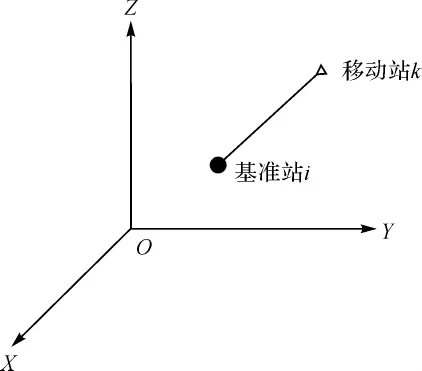
图1 RTK测量示意图
RTK测量的经典做法是将基准站架设在已知点上进行测量(如图1中,在WGS-84坐标系统下,基准站i的坐标已知),此情况下需要将基准站的接收机严格对中整平并量取仪器高,则测得的移动站坐标(以求差法为例)为
架好基准站后,在测区采集至少1个已知点的WGS-84坐标,并将已知点的当地坐标输入手簿中,使之与相应的WGS-84坐标对应。经过RTK的数据处理软件计算(基准站本身参与坐标转换计算)得到WGS-84坐标与当地坐标的转换参数,这样就可以将移动站测得的WGS-84坐标实时地转换成当地坐标。
三、RTK任意基准站技术的原理和实现方法
RTK任意基准站技术即测量时基准站的位置可以任选,如图1中,即基准站i的准确WGS-84坐标是未知的。此时基准站接收机不需要严格对中整平,也不需要量取天线高,基准站i的坐标采用单点定位获得,设为,则测得的移动站的坐标为
RTK测量是一种相对定位方式,式(2)中位置分量 ΔX'、ΔY'、ΔZ'是准确的,因此移动站 k的坐标相对为基准站i的坐标是严格准确的。由于上式中,基准站i的WGS-84坐标精度较差,不妨假设基准站 i的准确坐标为(Xi,Yi,Zi),两套坐标相差(ΔX,ΔY,ΔZ),则在基准站 i下测得的所有点的WGS-84坐标都存在相同的偏移量(ΔX,ΔY,ΔZ)。因此不妨将WGS-84坐标系整体移动(ΔX,ΔY,ΔZ)得到虚拟的坐标系统WGS-84'。则在此坐标系下,基准站i和在此测站测得的所有点的坐标是严格准确的地心坐标。此时接下来的任务从求取WGS-84坐标与当地坐标的转换参数变为求取WGS-84'坐标与当地坐标的转换参数。计算得到转换模型后,进而可以将测得的移动站坐标实时地转换为当地坐标。
RTK任意基准站技术允许基准站可以在任意位置进行架设,与RTK测量的经典做法中必须将基准站架设在已知点相比,具有很多优势[4]:① 基准站架设方便,可根据情况任意架设,可选择更安全、更方便、更有利的地理位置;② 基准站可架设在控制点与测区中间,缩小基线距离,提高精度;③ 不用严格对中整平,方便快捷,省时省力;④不用量取仪器高,最大限度地提高精度。
1.任意基准站技术的实现方法
坐标转换和高程拟合工作在任意基准站技术中起着重要作用,通过坐标转换和高程异常改正可以准确地将该测区所有点的WGS-84'虚拟坐标转换为当地地方坐标和正常高。任意基准站技术的实现方法包括:高斯投影计算,水平坐标四参数转换和高程拟合。
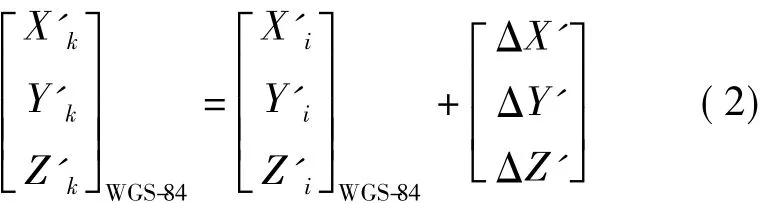
(1)高斯投影计算
投影是将椭球面上的大地坐标、大地线的方向和长度以及大地方位角按照一定的数学法则投影到平面上,获取平面上的直角坐标。高斯投影的计算公式[6]为
在RTK测量过程中,设置当地好坐标系统后,要根据实际情况在手簿中修改该地区的中央子午线、投影高度及东向平移量等参数。
(2)水平坐标四参数转换
将RTK测得的坐标直接进行投影是在假定当地地方坐标所在椭球与WGS-84椭球的中心和坐标轴相同的前提下进行,因此实际应用中还应考虑旋转平移和缩放问题。若X、Y为当地坐标系统下的已知平面坐标,X'、Y'为经过高斯投影后的坐标,则它们之间的四参数转换关系如下

式中,ΔX和ΔY分别为X方向和Y方向的平移参数;α为坐标系之间的旋转角度;m为尺度参数。为求出式(5)中的平移、旋转和尺度参数则至少需要已知两个平面点,如多余两个,可按最小二乘求解。
(3)高程拟合
高程拟合是指在测区内用GPS测量一些水准点(要求这些点分布均匀、分布合适),然后利用这些点拟合出它们的正常高和大地高的高程异常值,进而可以计算求得正常高。高程拟合计算的方法很多,包括加权均值法、多项式曲线拟合、多项式曲面拟合等方法,GPS水准利用多项式曲面拟合法应用最广。计算模型为

式中,f(x,y)为高程异常值ζ的趋势值,即似大地水准面;ε为模型误差。
当有多个点参与高程拟合时,式(6)写成矩阵形式如下
对于每个已知点,在最小二乘准则条件下解出各ai,求出测区范围内任何插值点的高程异常值ξ,进而计算出GPS点的正常高。
2.重设当地坐标
在每个测区进行测量的工作有时需要几天甚至更长时间,为了避免每天都重复进行坐标转换工作和每次基准站架设在已知点上进行严格对中整平的麻烦,很多RTK软件提出了重设当地坐标技术的解决方案。重设当地坐标技术只需要在测区内任意位置架设基准站,选择一精度较高的控制点在固定解的情况进行测量即可完成坐标转换工作。
图2 重设当地坐标技术原理图
重设当地坐标技术应用的前提是该地区的四参数转换模型和高程异常值已经计算得出,如图2中,坐标系统为上文提到的WGS-84'坐标系,并且将基准站架设在i处后经过测量已经计算得到该测区的四参数转换模型和高程异常值。如果此时将基准站架设在该测区中测过的控制点k上,即将基准站架设在已知点上,此时只要在手簿中输入控制点k的准确地心坐标即可进行RTK测量;如果将基准站架设在未知点j上,通过单点定位获得坐标为(X″j,Y″j,Z″j),由于该点的准确地心坐标未知,此时采用重设当地坐标技术,测量已知控制点k的坐标,则控制点 k 的坐标(X″k,Y″k,Z″k)为
根据相对定位的原理,基准站j和控制点k之间的位置向量 ΔX″、ΔY″和 ΔZ″是准确的,因此不妨视为将基准站和移动站调换位置,即假设控制点k为基准站,点j为移动站,且控制点k的准确地心坐标(X'k,Y'k,Z'k)已知,因此点 j的准确地心坐标(X'j,Y'j,Z'j) 为
经过上述转换后,此时基准站j的准确地心坐标已知,相当于将基准站架设在已知点上,因此接下来测得的碎步点通过坐标转换和高程异常改正后即可得到准确的当地坐标和高程。该技术只需要联测一个已知坐标的控制点既可完成,操作简单,省时省力。
四、工程应用
下面以实际参与的某河道断面测量项目为例来验证RTK任意架设基准站技术的可行性。本项目中采用RTK方式进行测量,使用华测公司的X90型双频接收机(RTK测量精度:水平精度 ±(10mm+1×10-6D),垂直精度 ±(20mm+1×10-6D),通过网络GPRS模式进行数据的传输。该河道长约6 km,外围分布着L01-L08共8个控制点(如图3所示)。项目中采用GPS任意基准站技术,将基准站架设在空旷、卫星信号好的位置。选取尽量能覆盖住测区的4个点(L01、02、L04和L08)进行解算四参数转换模型和高程异常值。
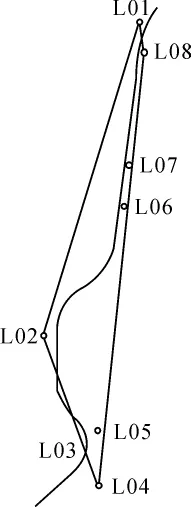
图3 某河道断面测量控制点分布图
通过采集4个点的坐标完成转换模型和高程异常值的计算,然后对测区中其他已知点进行了复测检核,以检验转换模型和高程异常改正的精度及任意架设基准站的正确性,结果如下:
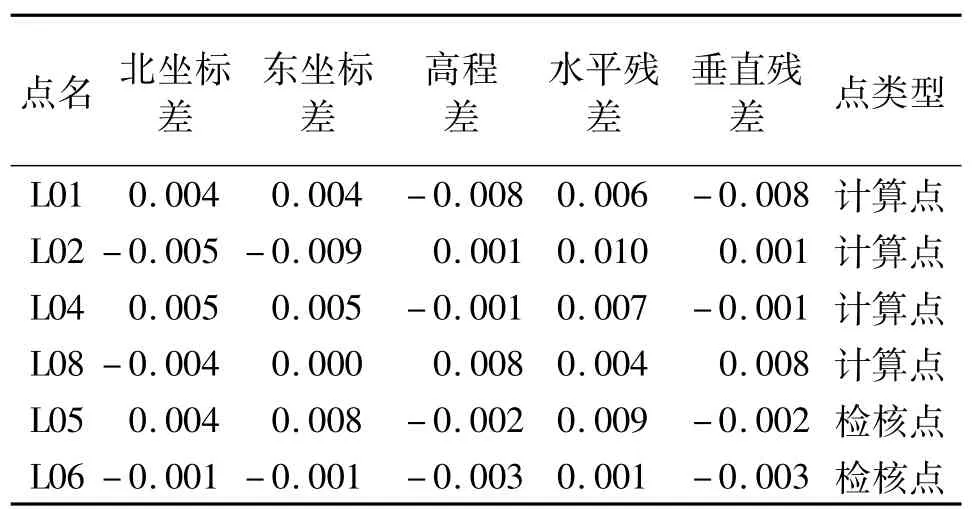
表1 点校正残差情况 m
从结果可以看出,参与计算的点L01、L02、L04和L08的水平残差最大的达0.01m,垂直残差最大为0.008 m,符合相关规范[7-8]要求。并且检核点L05和L06与资料提供的数据残差很小,水平残差最大为0.009m,垂直残差最大为0.003m。由此可以看出任意架设基准站技术是可行的。
由于测区较为狭长,并且在该测区进行断面测量需要花费2~3天的时间,为了提高精度一般将基准站架设到离测区较近的位置,因此在每天早上进行基准站位置选择时,将测站架设在离当天测量任务区域距离较近且空旷的位置,然后采用重设当地坐标技术进行坐标转换,并选取1~2个上述测量过的点作为检核。下面在控制点L01上进行重设当地坐标操作,然后选取 L06和 L08进行检核,结果如下:
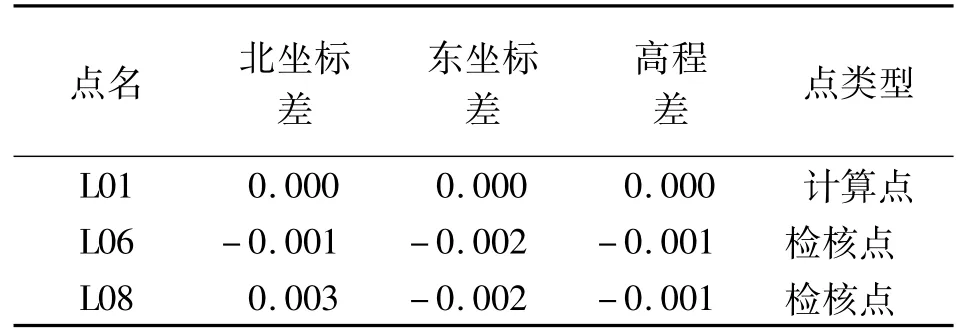
表2 “重设当地坐标”残差情况 m
从结果可以看出,L01的坐标和高程与之前进行坐标转换后的得到的坐标和高程一致,检核点L06和L08的测量值与之前测量的结果结果非常接近,最大的坐标差只有0.003 m,证明了重设当地坐标是正确的。
为了验证采用任意基准站技术后采集的碎步点的精度是否满足规范要求,此处列举了测量断面时所采集的部分碎步点,精度如下:
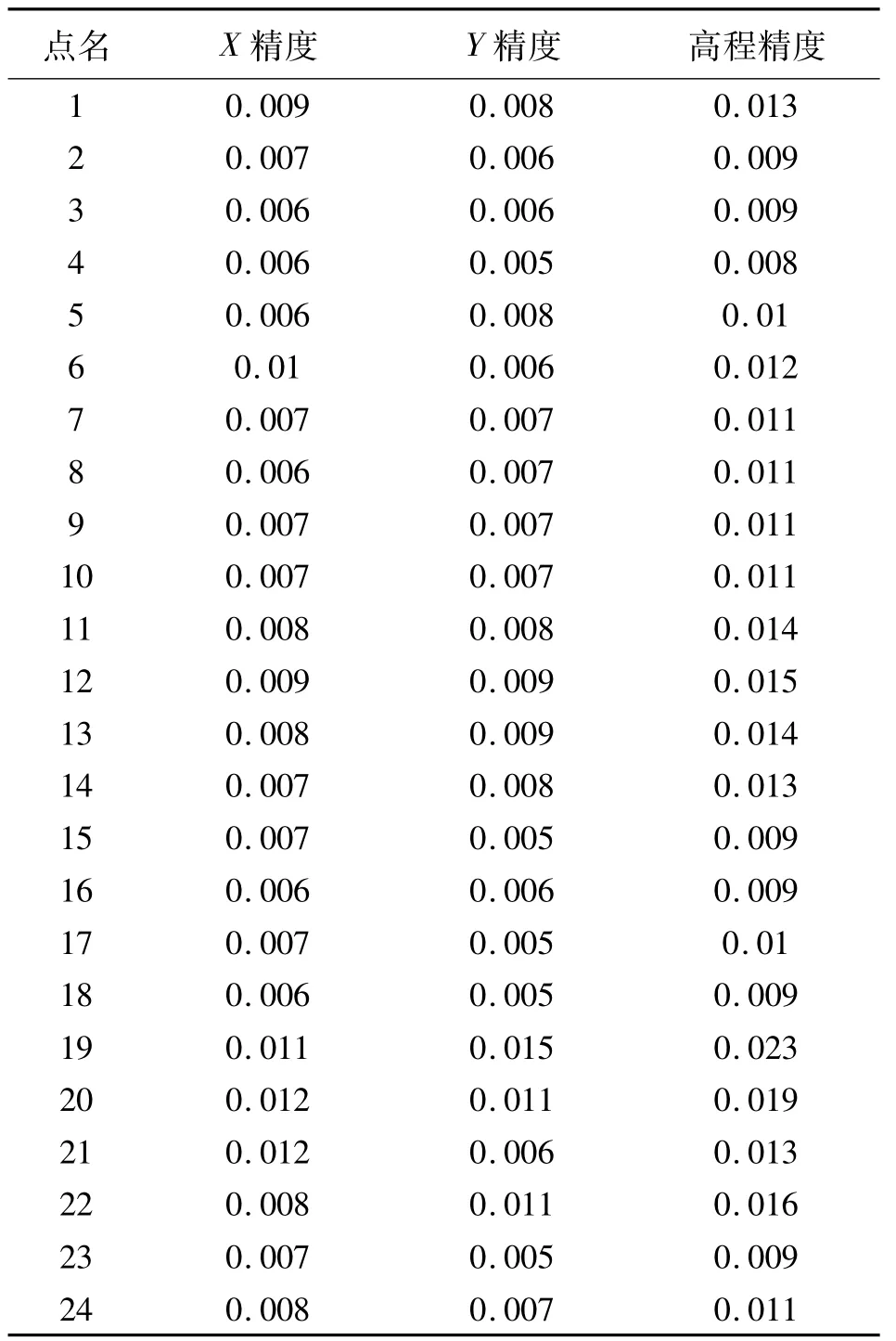
表3 断面测量碎步采集点(部分)精度情况 m
由上表可以看出选取的24个点的测量精度满足相关规范[7-8]要求,此处随机选取了24个点进行说明,事实上测量后的结果中所有点的精度都是满足规范要求的。
五、结 论
通过对RTK任意架设基准站技术的分析以及实际工程验证,可以得出以下结论:
1)任意基准站技术可以理解为建立一个虚拟的WGS-84坐标系,把将基准站任意架设的情况转化为RTK经典的测量(将基准站架设于已知点)情况,通过测量测区内部分控制点计算出四参数平面坐标转换模型和高程异常值。通过以上工程案例可看出任意基准站技术是完全可行,且测得的碎步点完全符合规范要求。
2)选择测区控制点进行计算四参数转换模型和高程异常时,选取的控制点应尽量选择点位空旷且能覆盖住该测区的点。
3)RTK任意基准站技术方便了基准站位置的选择,且不需要严格对中整平和量取仪器高,这样有利于提高GPS外业测量的精度,还可以缩短测量工期,减少工作成本,提高工作效益。
[1]李征航,黄劲松.GPS测量与数据处理[M].2版.武汉:武汉大学出版社,2010.
[2]华测公司技术支持部.华测任意架站基站的原理[R].上海.
[3]王峰,高飞.关于RTK基准站任意架设技术的探讨和分析[J].科学技术与工程,2007(20):22-26.
[4]张伟,张东升.GPS(RTK)基准站任意架设技术在工程测量中的应用[J].科技资讯,2006(16):40.
[5]吴俐民,吴学群,丁仁军.GPS参考站系统理论与实践[M].西安:西安交通大学出版社,2006.
[6]孔祥元,郭际明.控制测量学[M].武汉:武汉大学出版社,2006.
[7]水利水电规划设计总院,水利部.水利水电工程测量规范(SL197-97)[S].北京:中国水利水电出版社,1997.
[8]国家测绘局.全球定位系统实时动态(RTK)测量技术规范 (CH/T2009—2010)[S].北 京:测 绘 出 版社,2010.
猜你喜欢
军事文摘(2022年14期)2022-08-26
山东煤炭科技(2022年6期)2022-07-14
河北地质(2021年4期)2021-03-08
云南画报(2020年12期)2021-01-18
金桥(2020年10期)2020-11-26
铁道建筑技术(2019年6期)2019-11-29
中国铁道科学(2019年5期)2019-10-19
测绘通报(2018年10期)2018-11-02
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
