
无人机影像在大面积1∶2000地形图测绘中的应用研究
2012-12-11 06:08张海涛
测绘通报 2012年1期
李 雷,张海涛,李 兵
(北京市测绘设计研究院,北京100038)
一、引 言
由于无人机低空遥感平台具有升空准备时间短、操作控制较容易、不要求专用起降场地、运行成本低、影像分辨率高、受云雾等天气条件影响较小等特点[1],很好地解决了传统测绘航空摄影所存在的诸多问题。但由于无人机搭载非量测相机,且飞行姿态不稳定,造成影像畸变较大、旋偏角较大、比例尺不一等问题,使得传统生产工艺难以取得满意效果。目前国内绝大部分无人机低空遥感平台主要应用于影像的快速获取及数字正射影像的应急制作,很少涉及基本比例尺地形图测绘任务,尤其是大面积的地形图测绘。
本次利用无人机低空遥感平台所尝试的测区属于“北京市援疆(和田地区)测绘工程”中的一部分,包括新疆洛浦县城和洛浦北京工业开发区。摄影相机类型为 Canon 5D Mark II,镜头焦距为28.384mm,共飞行 3 个架次,航摄比例尺 1∶20 000,包括39条航线,2382张影像。空三加密时采用中国测绘科学研究院研制的PixelGrid高分辨率遥感影像一体化测图系统,并导入VirtuoZo及JX4摄影测量工作站进行矢量采集。成图面积约88 km2,覆盖1∶2000地形图120幅。
二、飞行平台选择及影像资料获取
洛浦县位于新疆和田地区,气候条件恶劣,测绘主体包括县城及待开发戈壁地区。本次航摄采用北京市测绘设计研究院和北京华北光学仪器有限公司联合研制开发的“华鹰”无人机航摄系统,由于其采用飞行姿态控制、曝光延迟补偿、转弯缓冲等多项技术,具有姿态稳定,抗风性强等特点[2]。传统航空摄影通常选择航向重叠60%、旁向重叠30%的方式,但由于无人机旋偏角较大,且像幅较小,按常规方式会导致部分像对在上下边缘处重叠范围低于50%的情况,造成航摄漏洞。考虑到如果大幅增加影像重叠度,会导致外业控制点数量和内业测图时像对数量过多的问题。经过综合取舍,最终摄影采用航向重叠70%,旁向重叠45%的方式。
三、控制点布设方案
目前所执行的技术规范是针对传统胶片相机制定[3],如一味套用将造成外业工作量繁重。陈红权等人的研究表明,DMC影像最佳布点间隔为8条基线[4],为稳妥起见,本次布点航线方向每隔8~10条基线布设一个平高控制点,旁向每隔两条航线布设一排平高控制点。由于测区部分处于戈壁地区,纹理比较匮乏,这就为控制点的选取造成极大困难,最严重地段甚至相隔29条基线才能选取到明显地物点,此时需在纹理匮乏地段的上下两航线加布控制点,以保证控制的稳定性。此外在加密分区角点及地物不明显区域,均采用了多控制点布设方式,并在航摄前对于纹理极其匮乏地区采取布置地标的方法,以保证空三加密时可以选取高精度点位。
四、空三加密
空三加密是早年无人机影像处理的主要瓶颈,综合运用多项技术及处理策略是解决问题的关键。本次空三将洛浦地区分为5个测区,考虑到无人机影像特点,空三加密时采用中国测绘科学研究院研制的PixelGrid高分辨率遥感影像一体化测图系统。由于软件使用多尺度特征匹配算法,具有尺度不变性、旋转不变性等特点,可以在像对间产生大量稳定的同名点,很好地解决了无人机影像匹配问题。其流程如图1所示。
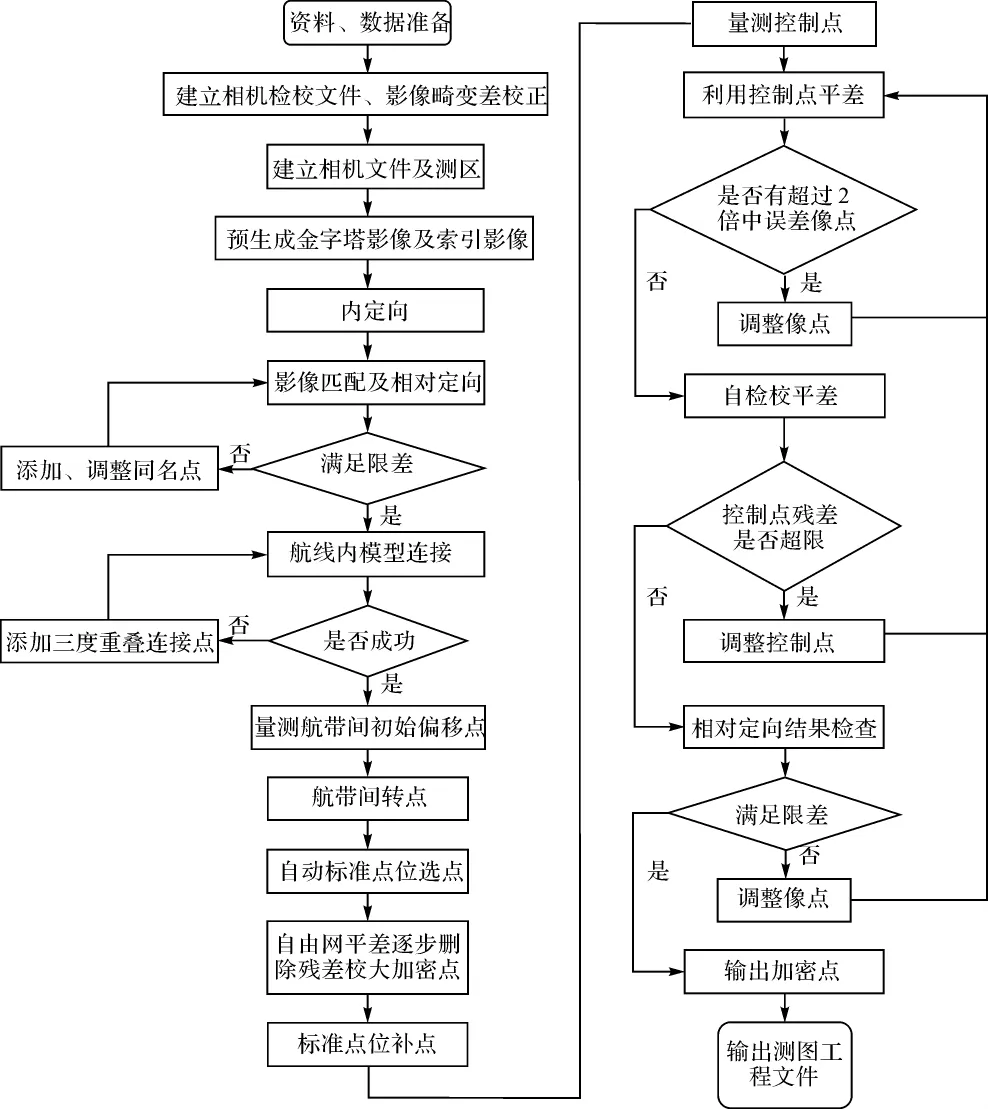
图1 空三加密流程图
1.关键技术研究
(1)影像畸变改正
与常规测绘航空摄影不同,无人机低空遥感平台通常搭载非量测相机,国内普遍使用500D、5D Mark II等民用普通单反相机配合定焦镜头进行摄影。由于受到镜头畸变的影响,导致物点、投影中心、像点不再严格共线,空间后方交会精度降低,特别是影像边缘,甚至会有20~40像素的误差。
图2分别表示无变形情况及由于镜头畸变所引起的桶装变形、枕形变形和切向变形。其中桶装变形和枕形变形称作径向变形,其对影像的影响远远大于切向变形。为削弱非量测相机畸变带来的误差,畸变改正成为无人机影像处理的必要步骤。对影像进行畸变改正所需的参数包括:像主点坐标x0、y0,焦距f,
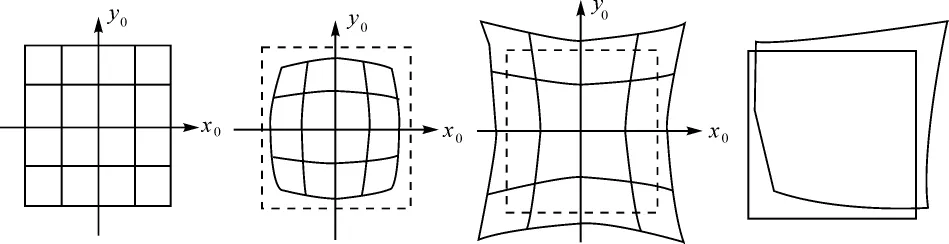
图2 无人机影像畸变
径向畸变系数 k1、k2,偏心畸变系数 p1、p2,CCD 非正方形比例系数α和CCD非正交性畸变系数β。改正模型如下
(2)影像匹配
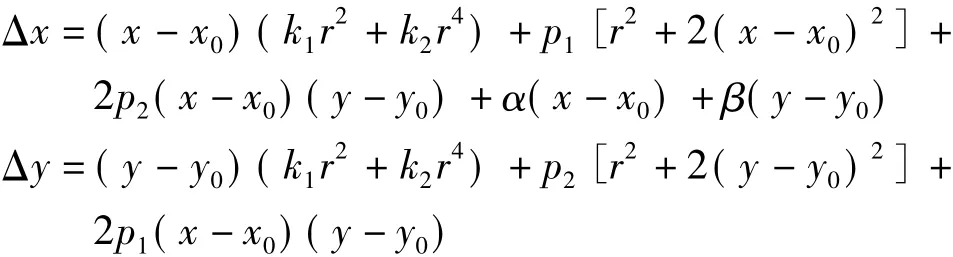
由于无人机飞行姿态不稳定,使得传统基于灰度的影像匹配算法难以达到较好的匹配效果,这也是无人机影像用于测绘成图的主要瓶颈之一。Lowe于1999年提出并于2004年总结完善的SIFT(scale invariant feature transform)匹配算法[5-6]具有尺度不变性、旋转不变性的特点,且对于亮度变化和仿射变形等具有鲁棒性[5],现已被逐步运用于无人机影像处理之中。其采用的高斯差分金字塔影像是通过相邻尺度空间的高斯金字塔影像相减获得,最接近尺度归一化的LOG算子,可以产生大量稳定与尺度无关的特征点,且影像匹配时首先将坐标轴旋转到特征点方向上,消除了由于无人机旋偏角过大带来的匹配困难。通过基于SIFT特征匹配算法(以PixelGrid软件为例)与传统基于灰度匹配算法(以VirtuoZo AAT软件为例)对比可以发现,利用PixelGrid软件处理的大多数像对同名点数量都达到了1000个以上,即使是纹理极其匮乏的戈壁地区也能匹配出一定数量的同名点,且不同像对间同名点所在位置比较稳定。而仅仅采用灰度匹配算法时在纹理匮乏地区可以匹配出的同名点数明显较少,且位置不稳定,导致模型连接成功率较低。可见SIFT算子匹配技术很好地解决了无人机影像因旋偏角较大,比例尺不一造成传统灰度匹配方法失相关的难题。
图3 PixelGrid、Virtuo AAT结果对比
上图体现了PixelGrid与VirtuoZo AAT模型连接后的结果对比。根据已公开的部分方法[7],产生此效果的原因如下:
1)在金字塔影像的最高层采用SIFT特征匹配算子,解决了相邻影像间尺度变化、旋偏角过大所引起的基于灰度影像匹配失相关的问题,可以产生大量同名点,并得到初始外方位元素,为基于灰度的精匹配提供初始值;
2)金字影像配合SIFT算子可以解决其计算复杂、运算时间长的弊病;
3)采用RANSAC算法[8]可以对错误的匹配点进行剔除;
4)对重叠区域进行格网划分,并利用Foerstner算子[9]提取影像中明显的角点等作为特征点,解决了SIFT算子特征点分布不均、与人眼识别的明显特征位置不符等问题。同时利用核线关系进行一维匹配,为最小二乘匹配提供初始值;
5)在金字塔影像的最低层采用最小二乘匹配方法,可以得到亚像素级的高精度匹配结果;
6)PixelGrid软件所采取的其他算法进一步提升了匹配效果。
2.相关处理策略
在加密过程中采用了以下策略以保证结果的稳定性和正确性:
1)考虑到洛浦地区地形特点,为保证转点的正确、稳定,初始偏移点选取时采用每隔10张影像选取一个初始偏移点,纹理极其匮乏地区每隔5张影像选取一个初始偏移点的方法;
2)由于无人机影像基线较短、飞行姿态不稳定,加之戈壁地区可以匹配出的同名点较少,本次选点时连接点分布采取13个标准点位,每个标准点位选取3个连接点的方式,这样可以在减少运算量的同时最大限度地保证加密点分布,提高区域网整体的稳定性;
3)为了避免残余畸变影响,标准点位补点时应尽量离开影像边缘,同时由于旁向重叠较大,补点时尽量使旁向重叠区域包含两排以上的连接点;
4)为提高空三加密效率,首先在自由网平差下逐步剔出误差较大的错误点,随后利用控制点平差进行精调整;
5)为最大限度地减少基线较短对高程的影响,将全部高程控制点参与解算;
6)为保证模型建立的准确性,将像点偏移值调整到3倍中误差以下。
3.精度统计与分析
经过平差计算,最终控制点定向精度和检查点精度分别如表1和表2所示。
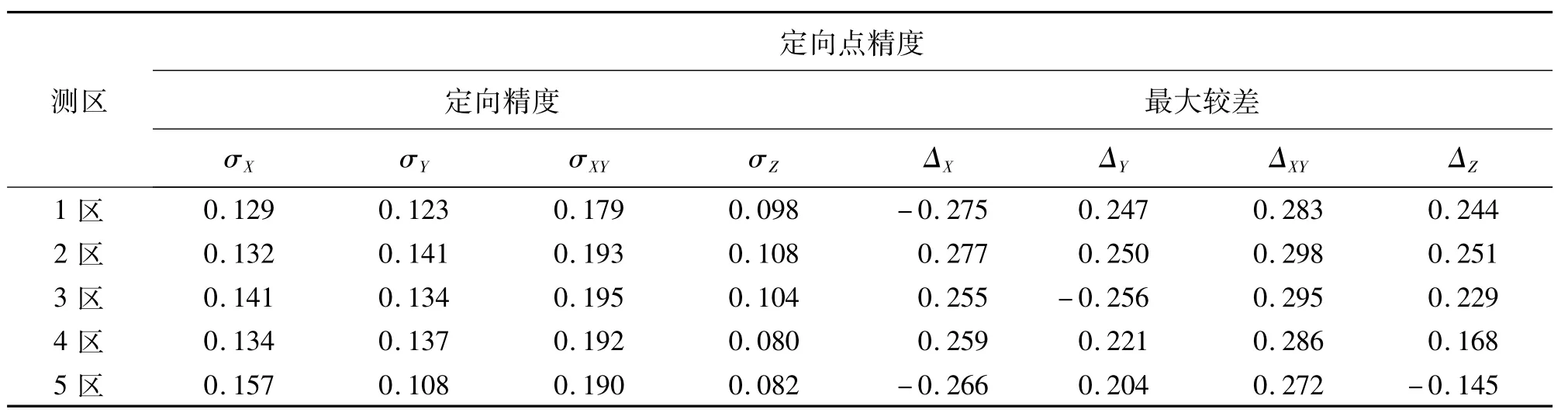
表1 控制点定向精度m
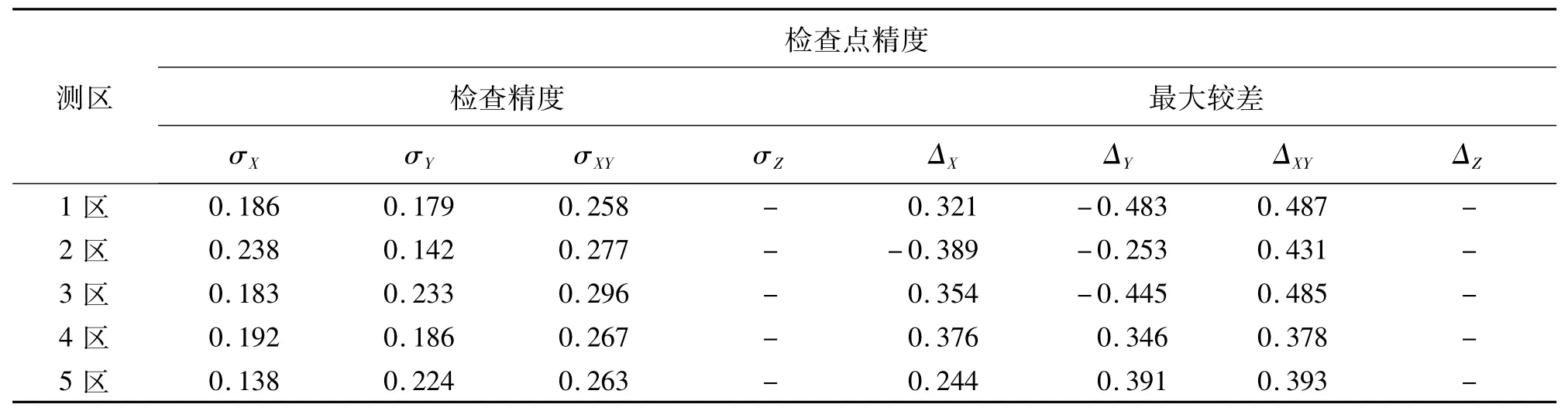
表2 检查点精度m
其中定向点精度是由n个定向点的计算坐标与其野外测量坐标的较差Δi计算得到的中误差,即检查点精度是由m个检查点的计算坐标与其野外测量坐标的较差计算得到的中误差。
可以看出,由于采用上述技术,保证了加密成果的稳定性和正确性。根据《中华人民共和国国家标准1∶500 1∶1000 1∶2000 地形图航空摄影测量内业规范(GB/T 7930—2008)》[10]要求,基本定向点限差为平面0.3m、高程0.26m,多余野外控制点不符值为平面0.5 m、高程0.4m,加密结果完全符合国家标准要求。
五、矢量数据采集及精度检测
最终,利用VirtuoZo和JX4数字摄影测量工作站完成了洛浦地区约88 km2、覆盖120幅1∶2000比例尺地形图的矢量采集工作,并选取375个平面点、234个高程点进行野外精度检测,结果如表3所示。
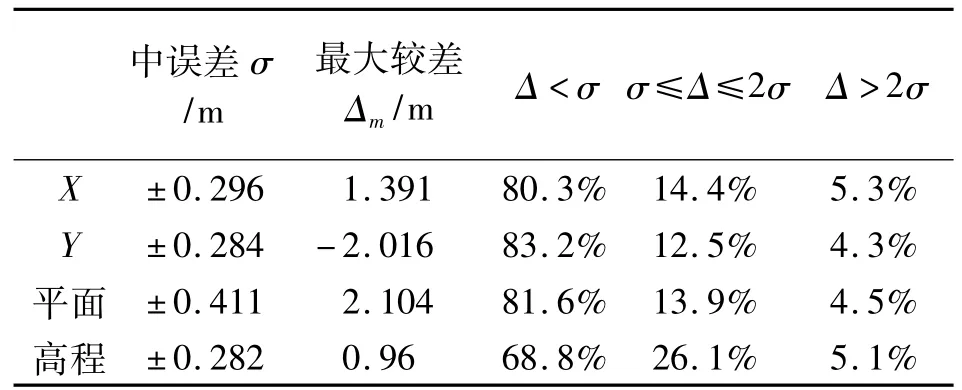
表3 野外精度检测
平面点误差分布如图4所示。
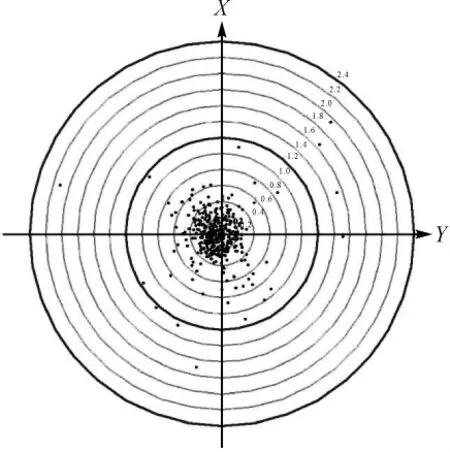
图4 平面点位误差分布(单位:m)
根据《中华人民共和国国家标准数字地形图产品基本要求(GB/T 17278—2009)》[11]并结合洛浦地区特点,平面中误差不应大于1.2m,高程中误差不应大于 0.5 m,平面限差为2.4 m,高程限差为1m。根据检测结果,超过限差的检测点数为0,平面中误差及高程中误差远小于国家规范要求,无人机遥感平台完全可以作为大面积1∶2000地形图测绘的一种技术手段。此外,通过对数据进行统计分析可以看出,平面误差分布方向较为均匀,且点位分布集中在0.4m以内,小于统计中误差的点数为81.6%,符合正态分布规律。高程方面小于1倍统计中误差的点数为68.8%,在1倍统计中误差及2倍统计中误差之间的点数为26.1%,大于2倍统计中误差点数为5.1%,相比平面而言出现了一定的不稳定性,这是因为对于本次航摄而言,基高比为

虽然在空三加密中使用了多种技术以保证解的稳定,但由于理想基高比为 1∶1 ~1∶1.5[12],而无人机影像像幅较小,因此造成了解的相对离散性。解决此问题的有效方法是加大CCD面积或使用多相机拼接技术,但这也为相机研制和无人机负载能力提出了更高要求。
六、结束语
通过空三结果及最终成图精度可以看出,无人机影像用于大面积1∶2000地形图测绘是完全可行的。文中为无人机影像处理中的关键技术找到了理论依据,并通过洛浦地区地形图测绘实践,形成了用于大面积1∶2000地形图测绘的生产工艺。同时在外控点布设、空三加密等方面有所创新,为利用无人机影像进行城市基本比例尺地形图测绘工作进行了有益地尝试。实际生产中应注意在摄影时需适当加大航向及旁向重叠度,以保证模型建立的稳定性并减少残余畸变影响。空三加密时应选取采用SIFT影像匹配算法,包含畸变改正的空三软件,以便对无人机影像进行有效处理。同时笔者建议采用多核、分布式处理功能的空三软件及无缝测图或自动更换像对方式的测图软件,达到在影像尺寸较小情况下提高生产效率的目的。此外,目前对于无人机影像的最佳控制点布设方案仍缺少定论,如何在减少外业控制点的同时保证加密精度有待进一步研究。
[1]范承啸,韩俊,熊志军,等.无人机遥感技术现状与应用[J].测绘科学,2009,9(34):214-215.
[2]李兵,岳京宪,李和军.无人机摄影测量技术的探索与应用研究[J].北京测绘,2008(1):1-3.
[3]中国国家标准化管理委员会.GB/T 7931-2008 1∶500 1∶1000 1∶2000地形图航空摄影测量外业规范[S].北京:中国标准出版社,2008.
[4]陈红权,徐而迅,周彤.基于DMC的像片控制测量布点方案探讨[J].现代测绘,2009,1(32):13-14.
[5]LOWE D G.Object Recognition from Local Scale-Invariant Features[C]∥Proceedings of the International Conference on Computer Vision.Corfu:[s.n.],1999:1150-1157.
[6]LOWE D G.Distinctive Image Features from Scale-invariant Keypoints[J].International Journalof Computer Vision,2004,60(2):91-110.
[7]王琳.高精度、高可靠的无人机影像全自动相对定向及模型连接研究[D].北京:中国测绘科学研究院,2011.
[8]FISCHLER M A,BOLLESR C.Random sample consensus:A Paradigm formodel fitting with applications to image analysis and automated cartography[J].Communications ACM,1981,24(6):381-395.
[9]FOERSTNER W,GUELCH E.A Fast Operator for Detection and Precise Location of Distinct Points,Corners and Centers of Circular Features[C]∥Proceedings of ISPRS Conferenceon Fast Processing of Photogrammetric Data.Interlaken:[s.n.],1987:281-305.
[10]中国国家标准化管理委员会.GB/T 7930—2008 1∶500 1∶1000 1∶2000 地形图航空摄影测量内业规范[S].北京:中国标准出版社,2008.
[11]中国国家标准化管理委员会.GB/T 17278—2009数字地形图产品基本要求[S].北京:中国标准出版社,2009.
[12]王志豪,刘萍.无人机航摄系统大比例尺测图试验分析[J].测绘通报,2011(7):18-20.
猜你喜欢
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
企业科技与发展(2018年5期)2018-09-10
北京航空航天大学学报(2017年4期)2017-11-23
摄影之友(影像视觉)(2017年10期)2017-11-07
中国工程咨询(2017年12期)2017-01-31
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28
癌变·畸变·突变(2014年2期)2014-03-01
癌变·畸变·突变(2014年6期)2014-02-27
