
基于PixelGrid软件的无人机数据处理方法和技术探讨
2012-12-11 06:08:42曹正响
测绘通报 2012年1期
曹正响
(甘肃省地图院,甘肃 兰州730000)
一、引 言
传统的航空摄影测量技术经过多年的不断发展和技术革新,至今已经非常成熟,在国家基本比例尺地形图测绘中发挥着独一无二的作用。但在面对小区域、大比例尺成图任务时,却因成本过高或不够机动灵活,而难以发挥作用。
无人机(unmanned aerial vehicle,UAV)遥感,作为传统航空摄影测量的一种重要补充方式,日益成为获取空间数据的重要手段,具有机动灵活、高效快速、精细准确、作业成本低的特点,在小区域和飞行困难地区快速获取高分辨率影像方面具有明显的优势,能够广泛应用于困难区域大比例尺成图和应急救灾等方面的测绘保障。
然而,由于无人机飞行环境的复杂性、飞行的不稳定性,以及采用非量测数码相机作为遥感设备,存在着非量测性、旋偏角和畸变差过大等问题,传统的摄影测量软件系统已很难顺利处理无人机数据。如何快速而有效地解决这些问题,无疑是无人机数据处理技术的重点。本文以摄影测量软件PixelGrid为例,结合对甘肃敦煌某测区无人机数据处理的作业流程,对无人机数据处理做了相关介绍和探讨。
二、PixelGrid软件简介
PixelGrid系统是中国测绘科学研究院研制的一款多源航空航天遥感数据集群分布式处理系统。该系统实现对包括低空无人机等多种高分辨率航空影像和卫星影像的摄影测量处理,采用计算机多核并行处理技术、自动化和人工编辑相结合作业的数据处理方式,以一定的任务调度策略完成影像数据的分布式处理,大大提高了遥感数据的处理能力。其低空无人机数据处理模块(PixelGrid-UAV)主要用于低空飞行器航空影像的摄影测量处理,能够完成低空航空影像和无人机影像数据从预处理、影像畸变差改正、自动空三、DSM/DEM的生成、正射影像的纠正、匀光匀色以及自动拼接的整个航摄数据处理流程。该模块采用基于尺度/旋转不变性特征的高精度多基线影像匹配算法,可有效解决由于大倾角、大旋偏角无人机影像的高精度、高可靠性配准的难题,实现了低空无人机遥感影像的快速空中三角测量处理。同时,该模块具有无人机航空影像与已有DOM和DEM的自动、高精度配准技术,突破了无人机航空影像快速无控制空三过程中控制点的自动提取和稳健的粗差定位与剔除等关键技术,从而实现大范围无人机航空影像在应急情况下的快速精准影像定位和高效高精度的影像地图制作。
三、低空无人机数据处理流程
PixelGrid处理无人机数据流程如图1所示。
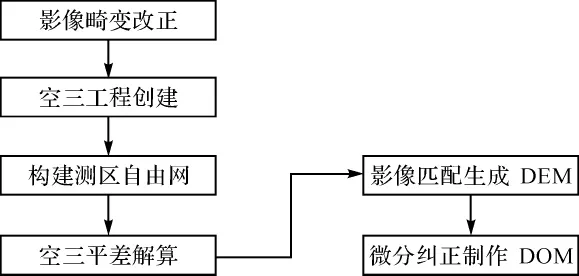
图1 PixelGrid-UAV处理无人机数据流程
所用数据情况说明:甘肃敦煌某测区无人机影像877张,共16条航线,GSD为0.08 m,覆盖面积约 12.5 km2。
1.像片畸变差改正
由于无人机搭载的摄影相机一般为非量测相机,与专业的航空胶片相机和专业的数字航空摄影相机相比,其影像存在边缘畸变,因此在空三加密前需利用相机畸变改正参数文件对原始影像进行畸变差校正,并将宽幅影像按实际的重叠方向做相应的旋转。
2.空三工程创建
设置工程目录后,创建正确的相机文件,包括像素数目、像元大小、相机焦距长等,注意校正后的影像像主点坐标均为0。同时设定内定向、相对定向限差以及模型连接限差和像控点文件。
3.构建测区自由网
创建好空三工程后即可生成金字塔影像并进行影像自动内定向,然后进行测区自由网的构建。若有POS坐标数据,可直接执行GPS/IMU辅助全自动连接点匹配命令,完成航线内部和航线间连接点的匹配。如果没有POS数据,则需要按相对定向、高可靠性模型连接、航带间拼接点选取、航带间自动转点等步骤逐步完成测区自由网的构建。
4.空三平差解算
在完成测区自由网的构建后,即可进行平差解算。一般先进行测区自由网平差,并剔除粗差,再量测像控点。像控点添加方法同连接点方式一样,只是输入点号需同相应的控制点点名一致。添加完控制点后,设置好空三平差参数,即可进行控制点平差。
平差完成后,查看控制点残差,如果控制点超限,则需对其进行修改再平差。直到连接点及控制点都满足要求为止。全部解算合格后,即完成了整个测区的空三加密。
5.影像匹配
空三平差解算完成后,即可进行DSM全自动提取。PixelGrid-UAV系统的DEM/DSM自动提取模块采用了独特的基于多基线、多重匹配特征的高精度匹配算法,且可以在多核CPU环境下进行分布式并行处理。但由于现实世界地物的复杂性,例如建筑物、树木、阴影等造成的影响,若需要得到较高精度的 DEM,还需要一些人工编辑及必要的质量控制。
6.数字微分纠正
PixelGrid软件下正射影像生成主要包括3个环节:影像的匀光匀色处理、正射影像的纠正、拼接处理与分幅裁切。通过计算机分布式处理技术,可以充分利用硬件资源,实现影像预处理、核线影像生成、影像匹配和正射纠正等作业步骤的高度自动化,大幅度提高数据处理效率。以本试验测区为例,共有877幅无人机影像数据,单人处理15 h后即完成空三解算和DEM、DOM的制作。处理数据结果效果如图2所示。
图2 无人机影像DOM效果
四、PixelGrid软件处理无人机数据注意事项
1)在设置测区影像信息时,如果有POS信息,可以直接导入POS坐标数据(其坐标系统必须与控制点坐标系统一致),即可确定影像之间的相对位置关系。如果没有POS数据,则需要根据航飞信息逐航线确定影像之间的位置关系,并设置好各影像的影像代号(一个测区内影像代号必须都是唯一的)、影像像素大小及检校文件。
2)在PixelGrid软件中,创建测区时相片顺序、旋转方向一定要仔细逐航线设置正确,否则将导致后续的相对定向、模型连接等无法顺利完成。
3)在进行模型连接时,有时可能由于影像质量问题或者地形因素导致模型连接失败,此时就需要在失败的模型连接像片上标准点位处增加3个以上的连接点,且每个连接点至少要在3张像片上都有同名影像点。在选取航带拼接点时,一般要求在航线首尾各选一个,如果一条航线上的像片数超过20个,则在中间位置增加一个航带初始连接点。
4)在设置平差参数时,其像点量测先验精度(μm)值一般设置成像元大小的一半(整数设置)即可,而平面及高程精度值设置则应小于项目精度要求,一般设置成控制点本身的精度。
五、无人机数据处理技术要点
1)由于无人机采用的是非量测相机进行航拍,其影像边缘存在较大的畸变,其特点是越偏离像片中心,畸变差越大,造成像点、物点和投影中心不再满足三点共线条件,按传统的共线方程无法顺利处理,因此利用正确的相机检校文件对原始影像进行畸变差改正极其重要,也直接影响着后续处理能否顺利成功。
2)由于无人机在实际航飞时情况的复杂性,往往并无准确的POS数据可以直接利用,此时可以按照航线飞行信息假定一套POS数据,用来确定相片之间的相对关系。
3)由于太阳光的投射角度不同、地物的差异以及相机本身曝光的不均匀等因素,每张原始影像在色彩和色调上不尽相同。为了使纠正后的正射影像在色彩及色调上尽量保持一致,各自然分幅图达到无缝拼接的目的,必须对影像成果进行匀光匀色,并在影像镶嵌时对拼接线进行必要的羽化处理。
4)由于无人机一般飞行高度较低、像幅较小,数据量较大,因此推荐使用单机多核或多机多核工作站,充分利用软件对计算机多核并行处理技术的支持,可以大幅度提高数据处理效率。
六、结束语
随着国民经济的快速发展,对小区域、大比例尺的地形图的需求量巨大,并且十分迫切。尤其在应急测绘保障方面,无人机航摄具有传统航摄无可比拟的优势。当前,全国测绘系统许多单位已配备了无人机航摄系统,无人机数据处理软件性能成为关键技术问题。相信随着高效率的无人机数据处理软件系统的推广使用,无人机航摄在提高测绘成果现势性、增强测绘应急服务保障能力等方面,必将发挥其巨大优势,并将越来越广泛地应用于民用生活。
[1]杨爱玲,孙汝岳,徐开明.基于固定翼无人机航摄影影像获取及应用探讨[J].测绘与空间地理信息,2010,33(5):160-161.
[2]宗秀影.LPS在无人机数据处理中的应用[J].测绘通报,2011(2):90-91.
[3]张祖勋,张剑清.数字摄影测量学[M].武汉:武汉大学出版社,1997.
[4]初爱萍.基于DPGrid软件的无人机数据处理[J].科技传播,2010(10):196-197.
[5]张强.低空无人直升机航空摄影系统的设计与实现[D].郑州:信息工程大学,2007.
[6]杨瑞奇,孙键,张勇.基于无人机数字摄影测量系统的快速测绘[J].遥感信息,2010(3):108-111.
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
河北地质(2021年4期)2021-03-08 01:59:14
河南城建学院学报(2020年3期)2020-08-14 01:08:38
中国铁道科学(2019年5期)2019-10-19 07:55:14
测绘通报(2018年10期)2018-11-02 10:07:28
摄影之友(影像视觉)(2017年10期)2017-11-07 02:37:15
汽车文摘(2016年6期)2016-12-07 00:23:38
电测与仪表(2015年3期)2015-04-09 11:37:22
交通建设与管理(2015年15期)2015-03-20 15:19:26
癌变·畸变·突变(2014年2期)2014-03-01 04:39:41
