
多速率传感器不完全测量数据自适应融合算法*
2012-12-07 06:05林孝工徐树生赵大威陈博飞
传感器与微系统 2012年4期
林孝工,徐树生,赵大威,陈博飞
(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)
0 引言
近年来,多传感器数据融合技术得到了广泛应用。针对多速率传感器数据融合问题,许多学者做了大量工作,形成了将异步问题转换为同步处理的算法[1~3]、异步递推算法[4]等。文献[5~8]对异步多传感器系统,构建了分层分级混合算法,提高了系统状态估计精度和容错性。
在实际的多传感器系统中,由于传感器故障、通信故障等会时常造成传感器的不完全测量。对于不完全测量的多速率传感器系统,首先要建立传感器子系统的故障检测算法,对子系统故障进行检测,自适应地选择传感器测量数据进行滤波,同时可以自适应地选择子系统参与融合。为此,本文针对不完全测量的多速率传感器系统,建立自适应的分级融合算法(adaptive hierarchical fusion algorithm,AHFA)。多传感器系统的融合过程分为子系统与全局两级估计,各传感器子系统按照各自采样频率独自进行滤波,其估计值在融合节点进行全局融合;各子系统根据故障检测建立切换控制准则,通过引入映射矩阵完成切换,自适应地选择子系统参与中心状态估计。该算法对于不完全测量的传感器子系统,利用其状态预测值代替状态估计值,与其他子系统进行中心融合,提高了系统的状态估计精度,具有一定的故障自适应处理能力。
1 子系统滤波算法
1.1 系统描述
假设N只传感器的采样频率不同,各传感器按照自己的采样频率独立地进行滤波,由传感器的测量值、子系统故障检测构成切换准则,通过映射矩阵,完成子系统的自适应选择,进行中心融合。算法原理如图1所示。

图1 多传感器数据融合框图Fig 1 Block diagram of multi-sensor data fusion
为推导融合算法,引入一类随机线性连续系统,暂不考虑控制信号的作用,系统的状态方程为[9]

式中 X(t)是n维状态向量;A(t)是n×n维系统矩阵,D(t)为n×p维过程噪声输入矩阵;过程噪声V(T)为p维零均值高斯白噪声向量,且有

式中 Q(t)为非负定对称阵,δt,τ为克罗迪克 δ函数。
假设N只传感器对目标状态X(t)进行连续观测,其测量方程为

式中 sTi(s=1,2,…)为传感器 i的第 s个采样时刻,X(sTi)为n维离散状态向量,Zi(sTi)为传感器i在sTi时刻的观测值,Hi(sTi)为pi×n维测量矩阵,测量噪声Wi(sTi)是pi维零均值高斯白噪声序列,且

其中,s,l=1,2,…;i,j=1,2,…N,Ri(sTi)为正定对称矩阵。
假设系统的融合周期为T,传感器i的采样周期为Ti,分别为传感器i在第k个融合周期内的采样数目和第q个测量值,系统采样原理如图2所示。

图2 传感器采样示意图Fig 2 Diagram of sensor sampling
对方程和离散化,得到

其中 ,i=1,2,…N,q=1,2,…,mk。
为推导方便,假设系统的融合周期T=1。
1.2 传感器子系统状态估计算法
各传感器子系统根据自己的采样周期,利用测量值,独自连续地进行卡尔曼滤波。在系统的第k融合周期,子系统 最后的状态估计值为)和)。
1.3 子系统故障检测算法
在多传感器数据融合系统中,所有测量数据经过质量检测才能进行滤波;各子系统只有通过故障检测才可参与融合。子系统滤波必须具有子系统的故障检测算法,一旦检测到故障就立即隔离,避免单点故障导致整个系统瘫痪。为此,建立子系统的故障检测算法。
利用滤波新息定义子系统故障检测函数

其中,vi(k)为滤波新息,新息方差为βi(k),λi(k)是服从自由度为m的χ2分布,m为测量值Zi(k)的维数。
故障判定准则为
若λi(k)>TD判定子系统有故障;若λi(k)≤TD,判定子系统无故障。其中,TD为由误警率确定的故障检测阈值。
1.4 映射矩阵与信息分享系数
根据传感器的测量值和子系统的故障检测,建立切换控制逻辑,自适应地选择传感器测量数据进行滤波,同时自适应地选择正常子系统参与融合。通过引入映射矩阵Si(k)完成切换控制。映射矩阵定义为:当传感器子系统正常时有Si(k)=In,否则,Si(k)=0n,其中,n为系统状态向量阶数。
根据各子系统的映射矩阵和状态估计的误差协方差矩阵,得到各子系统对应的信息分享系数。
设pi(k)为子系统的估计误差协方差矩阵,则子系统i对应的信息分享系数γi(k)为

其中,N为传感器子系统的个数。
1.5 传感器不完全测量的处理方法
由于传感器子系统故障会造成局部测量不完全情况,依据参与融合的测量数据越多融合精度越高的原理,建立相应的处理方法。
当传感器子系统发生瞬时故障时,将子系统滤波新息置为零,利用状态预测值代替状态估计值,进行中心融合;为了保持系统的稳定性和估计精度,这种瞬时故障的处理方法一般只能连续进行三次;若子系统故障为永久性,则利用映射矩阵将此子系统剔除,子系统恢复正常时再参与全局估计。
2 中心融合算法
假设多传感器全局融合的动态系统为

设中心融合观测量Y(k)与观测矩阵C(k)为

式中 N为参与全局融合的子系统个数,W(k),V(k)分别为过程噪声和观测噪声,相应的噪声协方差矩阵分别为Q(k)和 R(k)。
结合映射矩阵,新的局部观测矩阵ci(k)为

引入一个规范化矩阵E(k)
根据各子系统的状态估计值,利用映射矩阵和自适应信息分享系数,进行多传感器的中心融合。
中心融合的协方差矩阵为
中心融合的状态估计为

其中
3 仿真分析
对建立的自适应分级融合算法(AHFA)进行仿真,并与文献[9]的分步式预测融合算法(step by step prediction fusion algorithm,SSPFA)进行比较。以3个不同采样速率的传感器为例,利用三组随机数作为传感器测量值,进行仿真分析。
图3,图4是各子系统正常滤波时算法AHFA和SSPFA的比较,算法AHFA和SSPFA的仿真分别用实线和虚线表示。由状态估计的误差可知,算法AHFA提高了状态估计的精度。
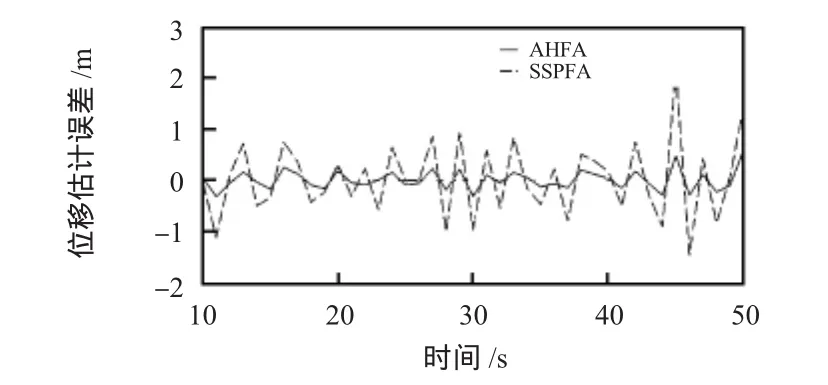
图3 两种算法的位移估计误差比较Fig 3 Comparison of displacement estimation errors of AHFA and SSPFA

图4 两种算法的速度估计误差比较Fig 4 Comparison of velocity estimation errors of AHFA and SSPFA
考虑子系统故障情况,设置传感器1,2,3的随机故障率分别为33%,12%,8%,利用算法AHFA进行有瞬时故障校正处理(记为AHFA—1)和无校正处理(记为AHFA—2)的比较,分别利用实线和虚线表示,仿真结果如图5,图6。由仿真结果可知,针对子系统的瞬时故障,本文的算法AHFA是有效的,采取瞬时故障校正的算法,提高了系统的状态估计精度。
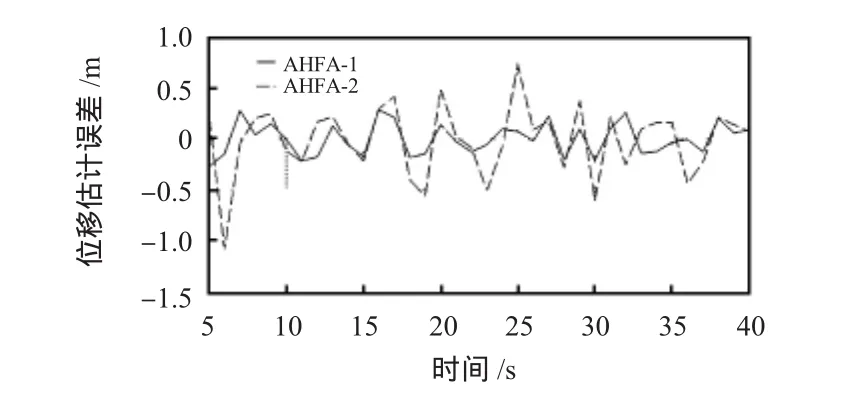
图5 两种算法的位移估计误差比较Fig 5 Comparison of displacement estimation errors of two algorithms
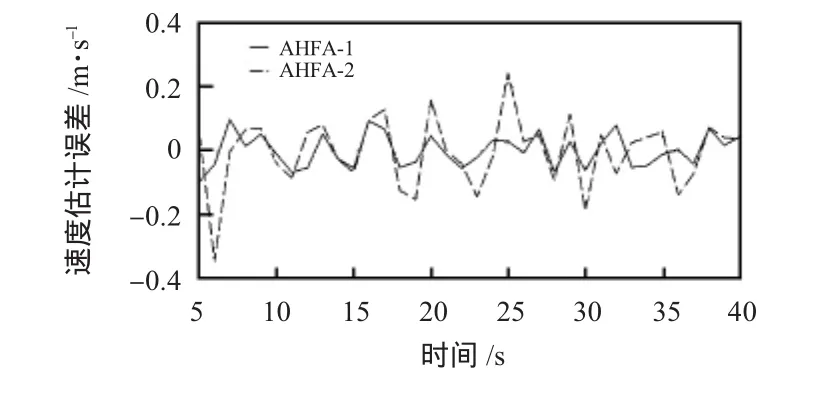
图6 两种算法的速度估计误差比较Fig 6 Comparison of velocity estimation errors of two algorithms
4 结论
本文对不完全测量的多速率传感器数据融合方法进行了研究,提出了一种自适应分级融合算法。各传感器子系统独自进行滤波,引入子系统故障检测函数,设立映射矩阵,建立子系统的自适应切换控制,解决了传感器不完全测量的检测处理问题;充分利用中心融合和子系统估计的最邻近历史信息,改善了融合效果;计算机仿真验证了该算法的有效性。
由于该算法需要对连续系统进行多次离散化,会带来相应的离散化误差,如何在实际应用中进一步完善算法,这是下一步要研究的工作。
[1]Qiu Aibing,Wen Chenglin.Optimal asynchronous multisensor centralized fusion estimate[C]∥Proceedings of the Eighth International Conference on Machine Learning and Cybernetics,Baoding,China,2009:3396-3401.
[2]闫莉萍,邓志红,付梦印.非线性系统的异步多速率数据融合估计算法研究[J].电子学报,2009,37(12):2735-2740.
[3]王媛媛,张 军,朱衍波,等.异步多速率传感器不完全观测信息融合算法[J].华中科技大学学报:自然科学版,2009,37(1):271-274.
[4]文成林,葛泉波,刘双剑.带有信息反馈的最优异步递推航迹融合算法[J].电子与信息学报,2009,31(9):2123-2131.
[5]Wu Chinwen,Chung Yinung,Chung Pauchoo.A hierarchical estimator for object tracking[J].EURASIP Journal on Advances in Signal Processing,2010(1):1-11.
[6]Fiengo G,Domenico D D,Glielmo L.A hybrid procedure strategy for vehicle localization system:Design and prototyping[J].Control Engineering Practice,2009,17:14-25.
[7]王 其,杨常松.联邦卡尔曼滤波在水下航行器组合导航系统中的应用[J].南京信息大学学报:自然科学版,2010,2(2):133-137.
[8]Majji M,Davis J J,Junkins J L.Hierarchical multi-rate measurement fusion for estimation of dynamical systems[C]∥AIAA Guidance,Navigation and Control Conference and Exhibit,Hilton Head,South Carolina,USA,2007:1-12.
[9]彭冬亮,文成林,薛安克.多传感器多源信息融合理论及其应用[M].北京:科学出版社,2010:120-152.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2018年8期)2018-11-10
中央民族大学学报(自然科学版)(2016年3期)2016-06-27
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
铁路通信信号工程技术(2014年1期)2014-02-28
