
基于MSP430的肌电假手系统设计*
2012-12-07 06:05李天博陈坤华吕继东
传感器与微系统 2012年4期
李天博,陈 玲,陈坤华,吕继东
(江苏大学电气信息工程学院,江苏镇江212001)
0 引言
手是人类最重要的器官之一,人类的一切活动都离不开它,一旦丧失,将会给人的日常生活带来极大的不便。肌电假手即是使用者根据自身残臂保留肌肉伸缩的强弱来控制的假手[1]。在这一方面,德国、英国等国家均研制出了比较先进的智能假手,占据着智能假手的高端市场。我国一些科研单位与生产厂家在智能假手的研究、生产上也开展了一些工作,并有部分产品进入市场,但仍然存在着一些缺陷和不足。主要表现在如下几个方面:1)响应、处理速度慢,不能与时根据使用者的意愿做出相应动作;2)由于肌电信号非常微弱,只有零点几毫伏至几毫伏之间,极易受到人体噪声与环境噪声的干扰,尤其是50 Hz工频信号的干扰,令残疾人在使用假手时极不灵活;3)力的掌握不准确,容易弄坏甚至破坏物体。比如:在拿一些易碎物体时,由于不能及时控制电机转速,手指继续用力导致物体损坏。因此,本文设计了一种以MSP430为核心的带触滑觉传感器功能的的肌电假手。
1 系统方案设计
本文在对肌电信号研究的基础上,设计出一种表面肌电信号采集调理系统与假手控制系统,系统的总体框图如图1所示,具体包括信号调理电路、MSP430主控制芯片、电机驱动电路、触滑觉传感器和假手装置。其工作流程为:肌电电极采集到人体表面肌电信号后进入信号调理电路,之后由MSP430单片机自带的A/D转换模块将模拟信号转换为单片机能够处理的数字信号,单片机根据采集到的信号进行特征提取与模式识别,通过软件编程驱动电机电路。单片机的输出口控制电机驱动芯片来实现直流电机的正反转,分别代表闭合、张开两种动作。同时,当假手与物体接触时,安装在手指部位的传感器将信息反馈给单片机,单片机读取传感器反馈的信号并进行识别和决策,形成一个闭环控制系统。
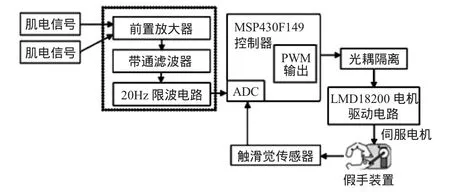
图1 系统总体框图Fig 1 Overall block diagram of system
2 肌电信号采集调理系统设计
高质量的肌电信号采集是决定假手性能的关键所在[2]。由于肌电信号采集于人体表面,信号的阻抗较大,且噪声干扰很大,因此,采集调理电路必须具备以下几点:1)高增益:由于采集到的肌电信号十分微弱,只有0.1~5 mV之间,高的放大倍数可以提高系统的采集精度[3]。2)高共模抑制比,用来抑制工频干扰。3)良好的滤波性能:由于采集到的肌电信号在10~1000 Hz之间,而其有用频率集中在50~350 Hz之间,尤其是50Hz的工频信号对表面肌电信号的采集有很大的影响,它的频率恰好在表面肌电信号能量集中的频段,且幅度比表面肌电信号大1~3个量级,因此,必须除去。4)好的抗干扰性,抵抗外界信号对假手的干扰。
肌电信号采集调理电路如图2所示。采用仪表放大器AD623作为前置放大电路;带通滤波器和陷波器采用四运算放大器LM324,其中带通滤波器由截止频率20Hz的高通滤波器和截止频率550 Hz的低通滤波器组成,采用双T型带阻滤波器来滤除50 Hz工频信号。前置放大电路的增益设置为99 V/V,高通滤波器增益为2.5 V/V,低通滤波器增益为2 V/V,因此,采集调理系统的总增益为495V/V。

图2 肌电信号采集调理电路Fig 2 EMG signal acquiring and conditioning circuit
3 假手控制系统设计
3.1 单片机电路
系统以超低功耗的MSP430F149单片机为核心,它是德州公司新开发的一类具有16位总线的带FLASH的单片机,内置2个16位定时器,一个14路输入的12位A/D转换器,采样速率高达200 ksps,1.8~3.6 V 低电压工作,同时具有非常强的处理能力,最高可达2 MIPS[4],非常适合一些对处理速度要求比较高的嵌入式系统。数据的采集、特征提取、模式识别都在单片机内执行。
3.2 电机驱动电路
由于步进电机的精度和性能远远低于直流电机,因此,本设计中选用德国Faulhaber公司生产的直流无刷微型电机2224U012SR,其额定电压为12V、输出功率为4.05W、空载电流为14mA、空载转速为7800r/min、额定转矩为0.5kgf·cm。
电机驱动芯片选用美国国家半导体公司(NS)推出的专用于直流电动机驱动的H桥组件LMD18200,采用单极性驱动方式。它有11个引脚,内部集成了4个DMOS管,组成一个标准的H型驱动桥。LMD18200的工作电压高达55 V,完全能够驱动12 V电机。
单片机的内部定时器A(P1.2/TA1口)产生PWM波,P1.6口产生方向信号,P1.7口产生刹车信号。为保证系统的稳定可靠性,将单片机与电机驱动电路之间通过光耦隔离[5],其中方向信号采用低速光耦TLP521—1隔离,PWM波采用高速光耦6N137隔离。
LMD18200驱动电机原理如图3所示,其中4引脚与单片机的P1.7口相连;TLP521—1的2脚接单片机 P1.6口;6N137的3脚接单片机P1.2/TA1口,控制电机转速。

图3 加光耦隔离的LMD18200驱动电机原理图Fig 3 Driving motor principle diagram of LMD18200 with optocoupler isolated
3.3 触滑觉传感器
传感器是假手与外界环境直接作用的媒介,它可以让假手模拟真手的部分功能,如触觉、滑动觉、热觉、力觉等[6]。目前市面上的假肢手一般都不具备这些功能。本文设计具有触觉与滑觉功能的智能肌电假手,可更好地协助残障者完成更为精准的动作。目前新型的触滑觉传感器都是基于压电原理和光电原理的,其敏感材料大多采用有机压电材料PVDF,通过对触觉和滑觉的不同响应,提取出触觉和滑觉信号。触滑觉传感器结构图如图4所示。
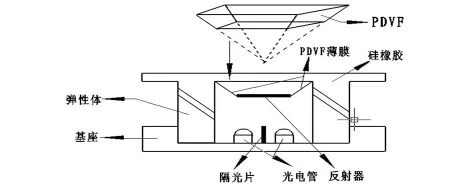
图4 触滑觉传感器结构图Fig 4 Structure diagram of tactile and slip sensor
PVDF压电薄膜受到一定方向的外力产生变形,在膜两侧的电极上聚集等量异号的正负电荷,测出相应的电荷值,即可实现对压力的测量。由于滑动产生的交变电压量为不超过100Hz的低频信号,对信号最为严重的噪声干扰就是50Hz的工频干扰,故采用双T带阻滤波器去除50Hz工频干扰,再经过电压跟随器、低通滤波器去除信号中的高频成分,得到有用的触滑觉信号后输入单片机进行A/D转换、分析以实现对假手的反馈控制。
触滑觉传感器安装在假手大拇指内,当假手接触到物体时,安装在大拇指内的传感器将触觉和滑觉信号经处理后反馈给单片机,单片机根据得到的信号进行识别并调整电机转速,从而控制假手调整握力,避免破坏物体。
4 软件设计
4.1 A/D 转换采集
MSP430F149单片机集成了14路12位的A/D转换,其中有8路为外部信号的转换,为P6.0~P6.7口,本系统采用其中的3路A/D,分别用于伸肌信号和屈肌信号的采集,以及传感器信号采集。单片机内部有2.5,1.5V两种基准电压,设计选用2.5 V。采样频率设置为2048 Hz。肌电信号经单片机处理后的特征值与标准阈值进行比较判断,结合触滑觉传感器反馈的信号,控制假手的张开、闭合以及力度。
4.2 PWM波形的产生
直流电机的速度是通过PWM波来控制的,而PWM波由单片机的定时器端口来产生,采用输出模式中的“复位/置位”模式产生PWM信号。PWM信号是一种周期固定,占空比变化的数字信号。设一个电压变化周期为T,一个周期内高电平时间为t,则占空比为:τ=。由此可知平均电压Ua=Umaxτ。
改变占空比,即可改变电机两端电压的平均值,由此实现对电机转速的调控(占空比越大,速度越高[7])。其中定时器A的CCR0来控制周期,CCR1来控制占空比,采用阈值控制法。
单片机的调试在IAR公司提供的Embedded Workbench集成开发环境中进行,数据的训练在Matlab7.0中完成,特征提取法选用应用广泛的均方根值RMS法,运用支持向量机(SVM)算法进行训练和分类,单片机根据EMG信号的处理结果控制假手做出不同的动作。
假手控制系统流程图如图5所示。

图5 肌电假手控制总流程图Fig 5 Overall flow chart of myoelectric control prosthetic hand
采集到的肌电信号经A/D转换、特征值计算后进行比较,若屈肌占优势则电机正转,假手开始闭合,当接触到物体时,触滑觉传感器产生触觉信号,电机减速,防止破坏物体,同时检测滑觉信号,若滑觉信号达到阈值则电机停转,成功抓取物体;相反,若伸肌占优势,则电机反转。
5 实验结果与分析
5.1 实验方法
实验前,首先要对测试部位的皮肤进行酒精擦洗并晾干,以便提取出完整的肌电信号,同时远离强大的静电场和电磁场。肌电电极选用人体可以长期佩戴的干电极。将电极固定在正常人的前臂上,信号分别从前臂后肌群的伸肌群和前肌群的屈肌群上采集。将肌电信号采集调理系统的输出端另引出导线连接到示波器上,同时将整个系统的输出端与假手装置相连并接通电源。测试者分别做展拳和握拳的动作。
5.2 实验结果与分析
图6(a)和(b)分别为测试者展拳时采集到的伸肌肌电信号与假手做出的张开动作,(c)和(d)为测试者握拳时采集到的屈肌肌电信号和假手抓取物体的动作。由图中可以看出:肌电信号采集调理系统可以准确地捕获到人体表面的肌电信号,并能够清晰地反映出肌电信号的大小。肌电信号经过信号调理电路处理后波形比较清晰,伸肌信号与屈肌信号特征明显,经MSP430F149单片机处理后可灵活控制假手的张开、闭合与力度。
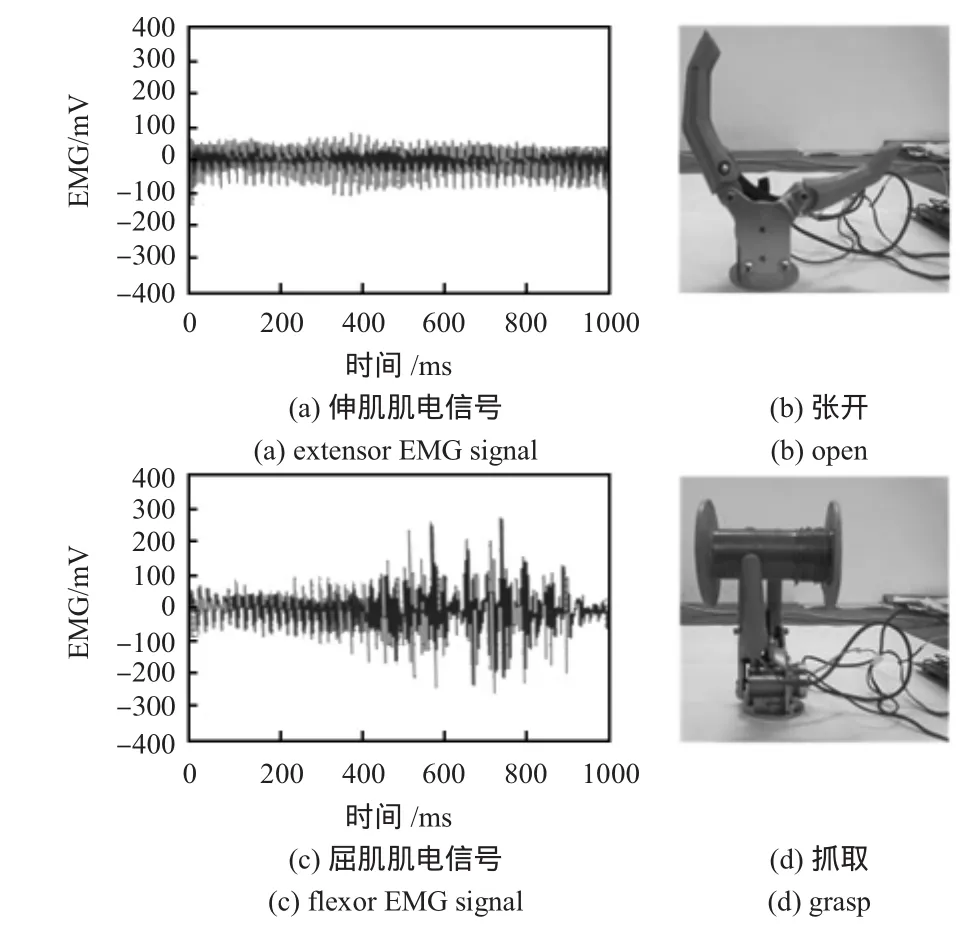
图6 肌电信号与对应的假手动作Fig 6 EMG signal and the corresponding action of prosthetic hand
6 结论
本文设计的肌电控制假手,在对肌电信号采集调理的基础上,采用MSP430单片机作为主控制芯片,体积小,功耗低,操作方便,通过实验证明可以满足使用者简单抓取物体的需要。同时在大拇指内安装触滑觉传感器,使假手操作更加灵活。实验证明此系统简单可靠,使用方便。
[1]蔡春风.人体表面肌电信号处理及其在人机智能系统中的应用研究[D].杭州:浙江大学,2006:1-86.
[2]朱 昊,辛长宇,吉小军,等.表面肌电信号前端处理电路与采集系统设计[J].测控技术,2008,27(3):37-39.
[3]Castellini C,Smagt P.Surface EMG in advanced hand prosthetics[J].Biological Cybernetics,2009,100:35-47.
[4]秦 龙.MSP430单片机C语言应用程序设计实例精讲[M].北京:电子工业出版社,2006.
[5]曾国强,葛良权.机器人比赛中直流电机驱动电路的设计[J].机器人技术,2008,24(5-2):236-238.
[6]Antfolk C,Balkenius C.Design and technical construction of a tactile display for sensory feedback in a hand prosthesis system[J/OL]Biomedical Engineering,2010,9:1-50.[2011—11—11].http:∥www.biomedical-engineering-online.com/content/9/1/50.
[7]黄伟锋,吴丽宏.基于单片机的直流电机调速系统设计与仿真[J].机电工程技术,2010,39(12):74-76.
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
中国药学药品知识仓库(2022年1期)2022-03-23
今日农业(2021年19期)2021-11-27
成都信息工程大学学报(2021年4期)2021-11-22
基层中医药(2021年5期)2021-07-31
今日农业(2020年13期)2020-08-24
科技传播(2019年24期)2019-06-15
今日农业(2019年16期)2019-01-03
北京航空航天大学学报(2017年9期)2017-12-18
现代电生理学杂志(2016年4期)2016-07-10
