
基于DSmT的机载目标断续航迹关联*
2012-12-07 06:54蓝江桥
传感器与微系统 2012年4期
高 岚,江 晶,蓝江桥
(1.空军雷达学院 研究生队,湖北 武汉430019;2.空军雷达学院四系,湖北武汉430019;3.空军雷达学院,湖北武汉430019)
0 引言
机载平台能够搭载雷达、ESM等多种异类传感器对目标进行探测。其中雷达等主动传感器具有探测距离远、精度较高,对目标的运动状态信息掌握全面等优点,通常作为主传感器完成对目标的跟踪。然而其固有盲区、遮挡、杂波以及虚警等原因容易造成目标量测的断续[1],当目标再次被检测到后将重新进行航迹起始,产生同一批目标出现多个批号并且短小航迹多等现象,即目标航迹断续。在目标密集情况下,该问题将变得更加严重,给机载数据处理系统造成沉重负担。因此,必须对中断前后关于同一目标的航迹进行识别并合并,即进行断续航迹关联。
然而目标位置量测的不确定性及其可能进行的机动使得断续条件下的关联问题更加复杂。同时,ESM等机载被动传感器能够获取目标的方位和属性等多特征信息,并且抗杂波性能优良[2],然而当目标的辐射源发生变化或者不可观测时即无能为力。因此,机载雷达与ESM协同下的断续航迹关联是提高目标航迹连续性的有效途径。
近年来,综合利用目标多特征信息提高关联准确性已经受到广泛关注[3~7]。其关键问题在于如何度量各航迹配对的关联度,不同的度量准则对应着多种关联算法。主要的算法有模糊关联[4]、神经网络关联[5]、灰关联[6]以及 D-S关联[7]等。其中基于D-S理论的关联算法能够处理多传感器多特征量测的不确定问题,且适用条件更加灵活等优势。然而其实际应用中存在对于冲突证据的合成效果差和潜在的计算量增大等问题[8]。本文提出一种基于DSmT[9]的断续航迹关联算法,该法通过建立中断前后航迹段配对的关联统计量,利用机载雷达与ESM的多特征量测计算相应关联度并将其作为证据进行融合,最后通过设定阈值判断中断前后的航迹段是否关联。
1 断续航迹关联问题
假设机载多传感器(雷达、ESM等)对空中多目标进行观测,采用分布式结构进行融合,各节点传感器获取目标量测数据后即完成本节点的数据配准与本地航迹起始。设融合中心k时刻已经形成关于目标j的稳定航迹,并且完成了节点间的航迹关联;因此,融合中心得到的目标航迹已具有属性信息。
根据多传感器的位置融合结果,初始阶段关于某目标的状态估计为该目标航迹的最后更新时刻,M为目标航迹数,则该类航迹集合记为若由于检测盲区、遮挡、低检测概率条件下的大幅机动等因素造成的目标量测中断时间较长,根据常规终止规则,目标航迹将出现断续;一定周期后,经过同样的起始关联过程,融合中心重新得到了N条航迹,其对应目标的状态估计记为为该目标航迹的起始时刻,该类航迹集合记为,如图1所示。定义

则Φ中的元素为所有可能的中断前后航迹的组合,为了使目标航迹保持连续,必需确定其中正确的配对。对于多数非合作目标,其状态的先验知识是未知的,考虑到杂波、噪声,以及分合批等问题,即使对于单目标情况,获得令人满意的正确关联率仍是十分困难的。当目标密集且各目标航迹中断的时间方位等有重叠的情况将更加复杂。
考虑到实际处理问题的方便,同时缩小判别范围,可将中断后航迹进行以下处理:对任意中断后航迹T1i,利用与递推滤波相似的思想,将其由航迹段末端向始端)进行逆向滤波,并继续逆向外推至中断前航迹的消亡时刻),并根据反向预测波门判断中断前航迹是否与其相关。图1给出了多目标航迹断续关联的典型情况。图中的椭圆表示关联波门,可以看到,由于没有有效量测的更新,中断后航迹T11,T12状态反向预测的不确定性不断增加导致波门放大,当重新获得目标航迹,进行相关判断的结果为T01,T02与T03均与T12航迹相关,同时T01与T03均与T11相关。显然,该判断结果还有待进一步确认。

图1 中断前后的航迹段关联示意图Fig 1 Association of track segments before and after the broken off
2 多特征的基本信度分配
2.1 识别框架定义
对于中断前后均为多目标情况,式(1)所描述问题的常用解决方法为多假设或多维分配法,然而其求解十分复杂。当N≥3时,N维分配问题为NP-hard问题,难以获得其唯一解[10]。然而本文将DSmT引入多目标断续关联问题中,利用目标航迹中断前后的多特征信息为依据,试图寻找既便于求解又能获得可靠正确关联率的新途径。
对于如图1所示,某关联门内的中断前航迹T0j,其在此航迹关联问题中的身份可以划分为:正确关联或者误关联,据此将该问题的识别框架Θ定义为

其中,命题θ1表示该中断前航迹T0j与生成此关联门的中断后航迹T1i为同一批目标,命题θ2表示二者非同一批目标。
2.2 基本信度分配
支持命题的各条证据通过基本概率赋值获得,在本文背景下,可以用来获得基本信度分配的目标多特征信息包括位置、速度、径向速度与目标辐射源信息,它们对于各命题的支持程度不同,并且有可能产生错误的证据(例如:目标辐射源信息,当航迹中断前后的辐射源性质发生变化,如波形频率等调整时,该证据可能出现错误)。对于任意,下面介绍各证据基本信度分配的获取方法。
1)位置信息

其中,估计误差
其协方差

则dij为从自由度为n的χ2分布的母体中抽取的子样,n为状态估计的维数的子集。令

其中,Xs~χ2(n),则称ps为航迹中断前后的目标位置的关联度,将其作为根据位置信息获得的支持命题θ1的基本信度分配m1(θ1),支持命题θ2的基本信度分配m1(θ2)=1-ps,这里α为置信度。
2)速度信息
与(1)中的方法相似,取目标状态向量中的速度分量建立相应的检验统计量,得到基于速度信息获得的支持命题θ1的基本信度分配m2(θ1)=pv,支持命题θ2的基本信度分配 m2(θ2)=1-pv。
3)伪径向速度
考虑由于径向速度盲区导致的目标航迹断续问题[3](对于机载脉冲多普勒雷达而言,此原因导致的掉点现象十分常见),由于目标落入机载脉冲多普勒雷达的径向速度盲区造成的航迹中断,中断前后目标的伪径向速度大小接近(都在门限附近),则建立检验统计量

4)辐射源信息
虽然单个平台上可能存在多个辐射源,但由于其用途不同会在频率上产生较大差异,因此,选择稳定且频段固定的辐射源信息是可能的。对于辐射源的ESM信息,这里选用载频(RF)、脉宽(PW)、重频(PRF)等3个特征参数分别作为属性向量。
设中断前后目标载频、脉宽、重频均服从均值为零,噪声标准差分别为σRF,σPW与σPRF的高斯分布。对中断前后航迹段等间隔采样l点,将ESM测得的目标航迹中断前后的辐射源属性信息视为从不同正态分布母体中抽取的子样,则中断前后采样点的目标载频、脉宽、重频分别可表示为PF0(k),RF1(k),PW0(k),PW1(k),PRF0(k)与PRF1(k)。
这里建立各参数的检验统计量

若中断前后航迹段属于同一批目标,则tRFij为从服从自由度为l-1的双尾t分布中抽取的子样,令

其中,Xs~t(l-1)。
称pRF为航迹中断前后的目标载频信息的关联度。同理可求得pPW与pPRF。由于3个特征相互独立,因此,中断前后的目标辐射源属性关联度可定义为:prad=pRFpPWpPRF,则基于辐射源信息获得的基本信度分配 m4(θ1)=prad,m4(θ2)=1-prad。
3 冲突条件下的关联规则
3.1 证据融合规则
PCR5规则是一种局部冲突局部分配的规则[11],认为冲突信息的产生来自于辨识框架中有明确决策的单焦元之间冲突,并集产生的不确定信息不参与产生冲突,并且单焦元产生冲突的作用大小与其本身的信度值呈正比。于是,它将每次合成后产生的冲突信息按照单焦元的信度进行再分配,PCR5规则被定义为∀(X≠Φ)∈GΘ。
当信息源数s=2时

PCR5规则保持了空信度的合成后对结果的中立影响,得到的结果更加准确。在处理2个证据源的证据时,计算量适中,但处理3个或3个以上的信息源的证据时,计算量较大。因此,本文融合过程采取两两合成的方式。
3.2 实现步骤
1)根据中断前后航迹段的数量确定待关联的航迹配对集合Φ;
2)令i=1,j=1,将中断后航迹 T1i逆向滤波并外推至最后更新时刻;
4)根据PCR5原则对各条证据进行两两合成得到新的证据 mij(θ1)与 mij(θ2);
5)j=j+1,回到步骤(2),直到j=N;
6)设定不确定性合成信度阈值m0,当mij>m0时判定识别过程有效,且可以作出决策:ans=max{m11(θq),m12(θq),…,m1j(θq)};
7)i=i+1,回到步骤(2),直到i=M;
8)正确关联结果输出,其余未关联航迹段判定为孤立航迹。
值得说明的是,决策过程中并未限制已经产生正确配对结果的航迹段参加下一轮分配,也就是说,该决策过程同时兼容了目标可能发生的分、合批情况。
4 仿真分析
假设两平行目标相对于载机切向运动,由于落入机载雷达多普勒盲区,分别与雷达发现目标后的39,41 s量测丢失,由此目标航迹中断;第55 s时同时发现三批目标并逐渐形成稳定航迹,如图2所示。同时由机载ESM获取的目标辐射源信息为(已完成与雷达航迹的关联):目标1载频},脉宽0.5μs,重频2kHz;目标2的载频4000 MHz,脉宽1μs,重频 8 kHz,目标 3 载频为 5 000 MHz,脉宽0.8μs,重频10 kHz;量测误差标准差均为 σRF=5 MHz,σPW=0.02μs,σPRF=0.1 kHz。逆向滤波采用CV模型下的带径向速度的EKF进行。
由图3可以看出:由于目标1,2近距飞行且在分批时进入盲区,因此,仅靠目标运动状态信息进行相关判断很容易出现模糊,例如:对于目标1,蒙特—卡洛仿真次数100,阈值为0.7时,根据目标位置、速度、伪径向速度得出的证据得出的正确关联率仅为40%;而加入辐射源信息后正确关联率达到80%,且在另一方面,对于两航迹段不属于同一目标的正确识别概率达到100%,避免了航迹段之间的误关联。此结论同时也验证了本文算法的可行性,在包括辐射源信息在内的有冲突的四条证据情况下,与没有加入辐射源信息时相比已经能够得出比较准确的结论。
在如图1所示的多目标情况下,根据本文算法得出的基本信度分配见表1,可见各条证据间的冲突很大。通过PCR5法则进行合成后的结果见表2,由本文算法流程,可判别T01与T11相关,T02与T12相关,同时由于关于目标3的2个命题的识别结果均小于阈值,因此,将其判定为新目标。

表1 各航迹段配对基本信度分配Tab 1 Basic belief distribution of every pair of track segments
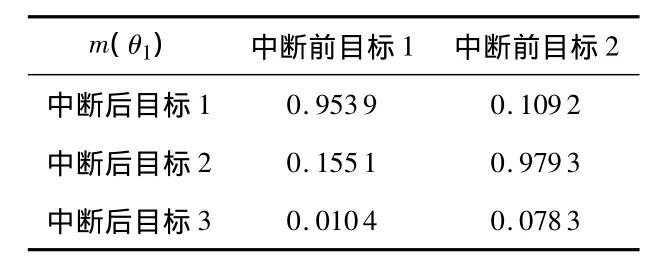
表2 识别结果Tab 2 Identification results

图2 目标与载机的运动轨迹Fig 2 Moving tracks of targets and the airplane

图3 载机获取的目标断续航迹Fig 3 Target track segments obtained by the airplane
5 结束语
针对多目标航迹断续问题,本文提出了基于DSmT的目标断续航迹关联算法。该算法首先将断续后的航迹段进行反向预测,以确定有可能来自同一目标的中断前航迹段。将可能来自于同一目标的中断前后航迹段配对的关联情况作为DSmT的识别框架,通过建立关联统计量的方式,利用主被动传感器获取的位置、辐射源信息等目标多特征信息得到的关联度作为各条证据的基本概率赋值,针对证据冲突的问题,利用PCR5规则将冲突再分配,减弱冲突对识别结果的影响,最后通过设定阈值进行关联结果的判定。仿真结果证明该算法简单易行,识别正确率高,同时对于一般方法不易识别的情况(例如:目标分合批等)具有适应性,对于工程实现具有指导意义。
[1]Morris G V.Airborne pulsed doppler radar[M].London:Artech House,1988.
[2]何 友,修建娟,张晶炜,等.雷达数据处理与应用[M].第二版.北京:电子工业出版社,2009.
[3]Bar-Shalom Yaakov,Kirubarajan T,Gokberk C.Tracking with classification-aided multiframe data association[J].IEEE Trans on AES,2005,41(3):868-878.
[4]陆强强,章新华,郭徽东.一种利用目标属性进行态势关联的方法[J].火力与指挥控制,2007,32(9):84-87.
[5]Zaveri M,Merchant SN,Desai U B.Robust neural-network-based data association and multiple model-based tracking of multiple point targets[J].IEEE Transactions on Systems,Man and Cybernetics,Part C:Applications and Reviews(S1094—6977),2007,37(3):337-351.
[6]王杰贵,罗景青,靳学明.无源跟踪中基于灰关联信息融合的概率数据关联算法[J].电子学报,2006,34(3):391-395.
[7]Jiang Jing,Guo Jing,Luo Peng-fei,et al.Multisensor multipleattribute data association[C]∥CIE International Conference of Radar,Beijing,1996:393-396.
[8]Smets P.Data fusion in the transferable belief model[C]∥Proceedings of the 3rd International Conference on Information Fusion,Paris,2000:21-33.
[9]Dezert J.Foundations for a new theory of plausible and paradoxical reasoning[J].Information and Security,2002,9:90-95.
[10]Zhou Li,Guan Jian,He You.Reseach of multi-dimension assignment algorithm of data association for passive-sensor location system[C]∥Proc of 2005 IEEE International Radar Conference,2005:133-136.
[11]Dezert J,Tchamova A,Smarandache F.Target type tracking with PCR5 and dempster’s rules—A comparative analysis[C]∥Proc of 2006 International Conference on Information Fusion,2006.
猜你喜欢
北京航空航天大学学报(2020年10期)2020-11-14
青年歌声(2019年12期)2019-12-17
雷达学报(2018年5期)2018-12-05
通信技术(2018年11期)2018-11-07
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年7期)2017-11-24
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
雷达学报(2017年1期)2017-05-17
北京航空航天大学学报(2016年6期)2016-11-16
