
动态目标热红外涂层隐身效能测试评价系统
2012-12-01 02:11:52侯亚丽焦景欣
探测与控制学报 2012年6期
王 伟,李 岗,侯亚丽,焦景欣
(机电动态控制重点实验室,陕西 西安 710065)
0 引言
现代战场,由于红外系统的广泛应用,战场目标被热红外系统探测的可能性和受红外制导武器攻击的危险性越来越大[1];作为对抗热红外侦察和攻击的有效手段,热红外伪装技术得到了迅猛发展[2]。热红外伪装技术的一项关键技术是建立通用的热红外隐身效能评价系统,对于论证和研制红外伪装器材,正确实施战场目标热红外伪装具有十分重要的意义[3]。
美国、俄罗斯等军备技术先进的国家在大力发展隐身技术的同时,也投入了大量的人力和物力,对隐身效果评估系统进行了大量的研究,并且应用于新型隐身武器装备的研制开发和隐身性能评估中[4-6]。国内关于这方面的研究起步较晚,现有的测试评价系统大多是对静止状态下的目标进行的红外辐射特性测试,主要采用两种测试技术手段:一种是采用K型热电偶、照度计、点温计及数据采集器对坦克车辆红外辐射特性进行测试与分析,获取静止的坦克在发动机工作或不工作两种状态下的红外辐射特性[7],该测试系统并没有考虑到在真实作战环境下坦克目标在运动状态与地面背景进行热交换等相互作用带来的影响。另一种是利用红外成像装置对目标和背景进行探测,形成红外热图像,通过人眼对目标进行发现或识别,确定目标发现和识别概率[8],由于人为因素,这种技术手段获得的结果具有很大的不确定性。因此,本文设计了一种利用光电自动跟踪平台,测试采集动态地面目标热红外图像信息,通过后期图像处理,得到目标隐身效能的动态目标热红外涂层隐身效能测试评价系统。
1 隐身效能测试基础
1.1 光电自动跟踪转台
光电自动跟踪转台是集光、机、电与计算机应用于一体的复杂系统,是靶场测量设备、光电跟踪测量设备、天文观测设备、航空航天领域、激光通讯设备、光电捕获跟踪与瞄准设备等不可缺少的关键硬件系统[9]。跟踪转台根据用途不同分为地平式、赤道式;地平式又分为U型结构、T型结构、球形结构。其由精密跟踪架、搭载设备、变焦距捕获跟踪电视系统、计算机控制与管理系统、测角系统、伺服系统、操作控制台等部件组成。光电自动跟踪转台是红外热像仪、激光测距机、捕获电视的承载平台;实现对目标的跟踪与测量,并给出目标的俯仰和方位角。
1.2 红外探测
红外探测利用红外系统来实现。红外系统通常由光学镜头、红外探测器、电子线路(信号处理系统)、机械传动装置、制冷器和记录或显示设备(装置)等构成(见图1)。目前,红外系统多种多样,而最常见的红外系统是热成像系统,如红外行扫仪、平台用热像仪、便携式热像仪、热成像制导系统、测辐射计、搜索与跟踪系统等[10]。
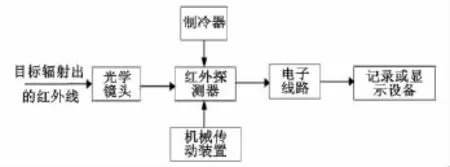
图1 红外系统原理示意图Fig.1 Infrared system theory
红外探测器是红外系统的核心部件,它的性能决定红外系统的好坏。红外探测器是一种光-电或热-电转换器件,能使入射到它上面的红外信号转换成微弱的电信号。按照功能和原理不同,红外探测器可分为点源式探测器和成像探测器两大类。其中,点源式探测器只能探测红外线的有无和强弱,而不反映目标的结构和形状。用于实战的红外探测器通常为红外成像探测器,它不仅能探测到红外辐射信号的强弱,而且能够获得红外目标的图像。
1.3 激光测距
激光测距是通过测量光在参考点和被测点之间的往返传播时间,由简单的运动学关系即可计算出目标和参考点之间距离的一种技术[11]。激光测距的基本原理如图2所示。测距机由激光发射系统和探测系统组成(如图中虚线框所示)。工作时,激光器发射激光,光束穿过大气到达目标,经目标反射后返回,并由探测器接收。测出从激光发射到反射光被接收所经历的时间,根据运动学中最基本的关系即可求出目标的距离。
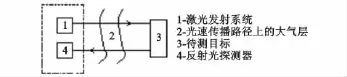
图2 激光测距原理图Fig.2 Laser range-find
2 动态目标热红外涂层隐身效能测试评价系统
2.1 系统构成
动态目标热红外涂层隐身效能测试评价系统由光电自动跟踪模块、红外热像采集模块、激光测距模块和后期对采集的热红外图像隐身效能分析评价软件模块构成。本系统光电自动跟踪平台具体组成如图3所示。

图3 测试系统组成示意图Fig.3 Test system structure
测试跟踪模块由光电自动跟踪平台、捕获跟踪电视系统和控制系统组成。捕获跟踪电视系统对视场内的目标图像进行识别和处理,实时给出目标脱靶量,由脱靶量参数通过控制系统实现跟踪架对目标的平稳跟踪。控制系统承担数据采集、信息管理和实时控制任务。红外热像采集模块包括长焦距红外光学系统、红外热像仪及其后的控制采集软件。在电视跟踪系统锁定目标后,由主控计算机对红外热像采集系统发送工作指令,实现对视场内的目标进行红外成像测试采集,实时给出目标红外热图。激光测距模块由脉冲式激光测距系统及控制采集系统组成,对目标进行精确定位,并记录距离信息。测量前要校准捕获电视跟踪系统光轴、热像仪光学系统光轴和激光测距机光轴,严格保证三者同轴。
分析软件模块通过插值处理,对视频数据和距离数据进行线性插值运算处理,使红外热图数据的帧频能一一对应距离数据。而后利用对比测量评价方法,研究度量相同状态涂装隐身涂层前后目标与背景之间的红外辐射特征对比度及目标的有效隐身效率,最终形成装甲车辆动态隐身效能评价技术。
2.2 评价原理
动态目标热红外涂层隐身效能测试评价系统是针对现有评价系统仅对静态地面目标或利用人眼进行隐身效能测试评价的缺陷,提出一种在真实作战环境下,地面目标在运动状态下的隐身效能测试评价的动态目标热红外涂层隐身效能测试评价系统,该系统避免了通过人眼识别而产生的较大不确定因素。
本测试系统是在研究目标特性的基础上,利用集成的动态隐身效能测试平台,通过形心、相关、边缘跟踪处理方式对动态地面目标进行捕获跟踪。该平台具有记忆外推跟踪功能,可实现捕获目标后对目标的自动跟踪。采用比对测量法(即分别对涂/未涂隐身涂层目标进行动态红外隐身效能对比测试),对涂装和未涂装隐身涂层的地面目标进行测试评价。通过激光测距机的精确测距功能实现涂/未涂地面目标的定位,采集运动中带距离信息的地面目标热红外图像信息。利用目标和背景灰度均值对比度C 的计算公式[12-13]:

红外隐身效率γ的计算公式:

式(2)中,γ为红外隐身效率;W 表示所选目标与背景灰度均值对比度C总量;W′表示目标隐身后目标/背景的灰度均值对比度降低的数量。
经过专用的图像识别评价软件分析处理,将含有相同距离信息的涂/未涂地面目标热红外图像对比分析,确定热图的识别特性及提取方法,得出涂/未涂运动地面目标的识别概率,完成动态地面目标红外隐身效能分析,最终形成动态目标热红外涂层隐身效能测试评价系统。
2.3 工作流程
动态目标热红外涂层隐身效能测试评价系统工作流程如图4所示。
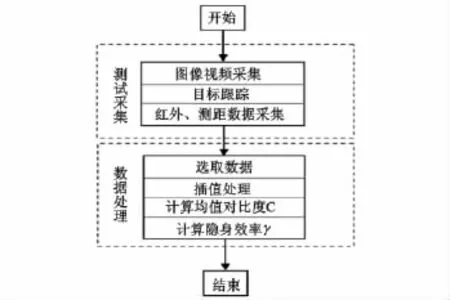
图4 测试系统工作流程示意图Fig.4 Work process of test system
该测试系统主要工作过程由两部分组成:测试采集和后期的数据处理过程。测试采集过程主要分为三步:1)通过电视跟踪系统采集目标与背景的视频信号,利用图像处理算法,给出目标在视场中的位置,进而把目标的位置信息传送给主控系统;2)主控系统根据电视跟踪系统提供的目标位置信息,经过角度合成和预测,驱动控制二维跟踪转台系统,使目标稳定地处于视场中心,同时二维转台系统将实时的角度位置信息传给主控系统以调整、控制和记录;3)在二维转台系统锁定目标之后,主控系统发出驱动控制指令,驱动激光测距系统和红外探测与采集系统工作,并采集、记录这两个系统传送回来的测试信息。
含有距离信息的动态目标红外视频热图序列通过专用的图像识别评价软件进行分析处理:
1)调用采集的动态目标红外视频图像序列和距离数据,并对其作初步选取;2)利用插值处理模块对视频数据和距离数据进行线性插值运算处理,使红外热图数据的帧频能一一对应距离数据;3)对匹配后的红外图像进行目标/背景区提取,分离出目标和背景,计算两者灰度平均值,再由式(1)得出目标和背景灰度均值对比度C;4)最后,由式(2)计算目标涂装隐身涂层后的隐身效率即目标和背景灰度均值对比度降低的概率,即红外隐身效率,是评价目标隐身效能好坏的依据,越大,隐身效果越好。
3 系统验证测试与结果分析
利用动态目标热红外涂层隐身效能测试评价系统对坦克目标进行涂装隐身涂层前后的动态某波段红外特征测试。测试现场布局如图5所示。
本次试验所用热像仪采集的帧频红外热图大小为320×240像素,灰度取值范围为0~255。试验分别在侧向、正向测试点共采集了20组未涂装和涂装坦克的运动热像及距离数据。图6为在同一位置采集的侧向未涂/涂装坦克红外热图。试验中,涂装和未涂装的测试条件如表1所示。利用式(1)计算目标/背景热像图的灰度均值对比度,得到如表2所示的结果。注:目标的红外隐身涂层效能与其所处的环境密切相关。

图5 测试现场布局示意图Fig.5 Test layout

图6 未涂/涂装坦克某红外波段侧向热图Fig.6 Infrared side elevations of without coat and coat tank
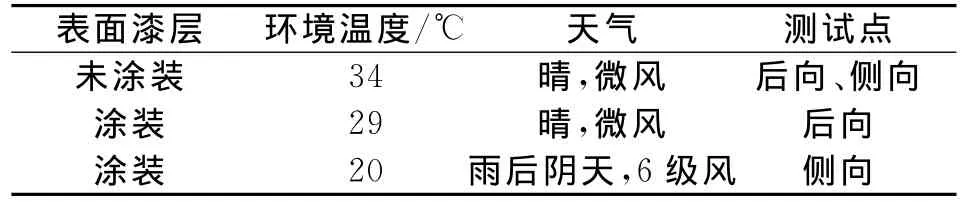
表1 试验环境状况表Tab.1 Test environment statue

表2 动态隐身测试数据及结果表Tab.2 Dynamic stealth test data and result
从表2中可以看到,在所有的18组测试数据对比中,涂装隐身涂层后的目标/背景的灰度均值对比度有9组出现了增大的情况,出现降低的数据组只有9组且降低比率也很小。再根据式(2)计算得出红外隐身效率γ=0.5。证明:本次红外隐身涂装方案在该试验环境中没有达到隐身效果,该隐身方案不适合此背景环境中的红外隐身。
由上述测试及结果分析可以看出,目标热红外涂层动态隐身效能测试评价系统满足对真实战场环境下动态地面目标的隐身涂层效能测试,且利用专用的图像识别评价软件进行动态隐身效能评价,避免了人眼识别产生的误差。
4 结论
本文提出了一种测试坦克装甲车等地面运动目标热红外隐身涂层,并分析给出隐身效果性能好坏的自动测试评价系统。系统由红外热像采集模块、激光测距模块、光电自动跟踪测试平台和后期对采集的热红外图像隐身效能分析评价软件构成。通过对坦克动态隐身涂层效能测试评价证明:本系统适用于评价运动地面目标热红外涂层的隐身伪装效果,也能对静止目标进行测试评价。该测试系统解决了在真实作战环境下,坦克装甲车目标在运动状态下的隐身效能评价,避免了通过人眼识别而产生较大不确定因素的缺陷。
[1]王博,王自荣,孙晓泉.一种评价热红外涂层隐身效果的方法[J].航天电子对抗,2004(1):63-65.WANG Bo,WANG Zirong,SUN Xiaoquan.An stealth evaluation method of thermo infrared coat[J].Aerospace Electronic Warfare,2004(1):63-65.
[2]Mark L B Rodgers.The development and application of diurnal thermal modeling for camouflage,concealment and deception[J].Proceedings of SPIE,2000,4029:369-377.
[3]秦建飞,刘永弘,吕进.热红外伪装效果评价系统的设计与实现[J].工兵装备研究,2003,22(3):17-20.QIN Jianfei,LIU Yonghong,LV Jin.Design and realization of thermo infrared disguise effect evaluation system[J].Engineer Equipment Research.2003,22(3):17-20.
[4]Vaitekunas D A,Alexan K,Law rence O E,et al.SHIPIR/NTCS:a naval ship infrared signature counterm easure and threat engagement simulator[J].SPIE,1996,2744:411-424.
[5]韩玉阁,宣益民.战车红外隐身效果评估方法研究[J].红外技术,2003,25(6):22-24.HAN Yuge,XUAN Yimin.The methodology study for the infrared camouflage effect evaluating of the armored vehicle[J].Infrared Technology,2003,25(6):22-24.
[6]朱涛,徐晓刚,王孝通,徐冠雷.隐身涂料效果评估系统研究[J].兵工学报,2010,31(1):124-128.ZHU Tao,XU Xiaogang,WANG Xiaotong,XU Guanlei.Research on effect evaluation system of stealth paint[J].Acta Armamentarii,2010,31(1):124-128.
[7]罗来科,韩玉阁,章桂芳,等.坦克车辆红外特性测试与分析[J].车辆与动力技术,2005(4):7-11.LUO Laike,HAN Yuge,ZHANG Guifang,et al.Study on test and evaluation on infrared features of tanks[J].Vehicle & Power Technology,2005(4):7-11.
[8]崔宝生,邹南智.红外伪装效果检测方法研究[J].红外与激光工程,2000,29(1):62-64.CUI Baosheng,ZOU Nanzhi.Study on infrared effect simulation measurement of camouflage equipment[J].Infrared and Laser Engineering,2000,29(1):62-64.
[9]黄立新.机动式光电跟踪转台小型化设计与可靠性研究[D].哈尔滨:哈尔滨工程大学,2008.
[10]刘兴堂,周自全,李为民,等.现代导航、制导与测控技术[M].北京:科学出版社,2010.
[11]何照才,胡宝安.光学测量系统[M].北京:国防工业出版社,2002.
[12]宣益民,韩玉阁.地面目标与背景的红外特征[M].北京:国防工业出版社,2004.
[13]陈翾,杨立,张晓怀.目标红外涂料隐身技术评判标准研究[J].光电工程,2008,35(10):43-47.CHEN Xuan,YANG Li,ZHANG Xiaohuai.Judgment criterion of infrared camouflage coating technology of targets[J].Opto-electronic Engineering,2008,35(10):43-47.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
环球时报(2022-05-23)2022-05-23 11:28:37
高技术通讯(2021年3期)2021-06-09 06:57:48
金桥(2021年4期)2021-05-21 08:19:20
电子制作(2019年7期)2019-04-25 13:17:14
测控技术(2018年6期)2018-11-25 09:50:24
通信电源技术(2018年5期)2018-08-23 01:16:04
制导与引信(2017年3期)2017-11-02 05:17:00
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年3期)2016-11-07 09:03:43
