
基于RNP AR进近程序的最后进近航段分析
2012-11-27 02:02王志学
中国民航大学学报 2012年5期
王志学,李 晔
(中国南方航空股份有限公司广州飞行部,广州 510405)
所需导航性能(RNP)是目前国际上热门研究和着重发展的航行新技术,是对在规定空域内运行所需要的导航性能精度的声明,它对于在一个规定空域中的运行至关重要。国际民航组织(ICAO)新航行系统(FANS)特别委员会对RNP的定义为:在一个指定的空域内运行的航空器在水平方向上(经纬度位置点)所需的导航精度。RNP的类型根据航空器至少有95%的时间能够达到预计导航性能精度的数值来确定,用RNPX来表示在一个区域,或者一条航线,或者一个程序中的最低导航系统条件[1]。RNP类型如表1所示。
在RNP空域中飞行的每架飞机应该有一个系统导航位置的误差总计,应等于或者小于95%的飞行时间的RNP值。
RNP进近是指以RNP方式实施进近,或以直线进近阶段的RNAV(基于GNSS)进近程序,精度值一般为0.3,但对复飞导航精度不做要求,复飞程序可以转变成传统导航方式,使用卫星导航为主要方式,程序设计时需考虑卫星失效或机载监控和告警功能丧失导致失去RNP进近能力的可接受性(余度),对通讯和雷达监视不做要求。在运行批准上,同一种类型飞机获得批准即可,如A319系列,实施的机场目前为三亚、伊春、温州。

表1 RNP类型Tab.1 RNP types
RNP AR是一种更高类型的进近。ICAO对其的应用定义为:要求特殊授权的所需导航性能运行项目,其精度值要求在0.3~0.1之间,最后进近定位点(FAF)之前和之后为曲线飞行航迹。水平精度警戒区域被限制在2RNP值以内,并没有额外裕度,只允许使用卫星导航,并且能对精度进行预测,做此类进近每一架飞机和每一个人员都必须得到局方的特别授权批准,实施的机场有拉萨贡嘎机场、云南丽江机场等。
1 RNP AR的最后进近航段分析
最后进近航段水平引导基于RNP,应使用0.3的RNP值进行评估。仅在RNP0.3导致在DH超过90 m或能获得重要运行利益的情况下,可使用较小的RNP值,最小值为0.1。
1.1 侧向保护
对于RNP/AR程序(RNP值在0.3~0.1之间)的保护区则不考虑缓冲区,通过附加的审定、批准和机组训练来保证在没有缓冲区时,仍能保证在适当的安全水平范围内。RNP/AR准则能提供与当前国际运输航空事故率相当的安全水平,不会导致总运行事故率的增加。对RNP/AR程序,主区域半宽为2RNP,没有缓冲区或副区,即最后进近航段的侧向保护区半宽为2×0.1[2]。

1.2 垂直保护
RNP/AR的进场、起始进近和中间进近使用基本RNP的垂直超障准则,在此不做分析。
由于RNP/AR最后进近的垂直引导(VNAV)是基于气压,因此,不能使用远距高度表拨正源,最后进近航段不得设置在对风和气压有严重影响的地形上,障碍物不得穿透目视保护面。最后进近航段区域从最后进近定位点(FAF)前1×RNP处开始,在着陆跑道入口点(LTP)处结束。区域包含倾斜的超障面(OCS),以评估超障高(OCH)前的障碍物,还包含从OCH到LTP的目视航段面,如图2所示[2]。

图2 最后进近航段评估面Fig.2 Final approach segment obstacle assessment surface
由此可见,最后进近航段中最核心的问题是确定最小超障余度(MOC),通常用垂直误差分配(VEB)来表示。VEB随程序设计确定的特定值而定:RNP值、LTP标高(MSL)、从LTP到FAF的距离、垂直航径角(VPA)、跑道入口基准高(RDH)、最低温度、坡度角、直线航段或RF航段[2-5]。
对于气压高度表和机组能力,可通过审定、批准及训练来保证满足该保护面的要求。
1.2.1 垂直航径角(VPA)和跑道入口基准高(RDH)
标准和最小的VPA都是3°。只有因障碍物的原因不适合使用3°VPA,或者运行受最低可用温度的限制时,可使用大于3°的下滑角。表2列出了不同航空器类型的允许最大下滑角,如果要求的下滑角大于航空器类型的最大允许角,不应公布该类型航空器的OCA/H。如果跑道具有仪表着陆系统(ILS),用于同一跑道的RNP程序应具有相同的RDH和下滑角值。如跑道无ILS但具有目视下滑坡度指示器(VGSI)系统,RNP程序的VPA应尽量与VGSI的角度一致。如VGSI角度与VPA角度相差超过0.2°时,应在进近图中予以说明。下滑角不应使航空器下降率超过300 m/min(1 000 ft/min)

表2 最大VPATab.2Maximum VPA
1.2.2 可变的误差
实际导航性能误差(ANPE)。实际导航性能(ANP)取决于所需导航性能(RNP)。
RNP是由制造商保证飞机的实际位置在95%的时间里都将在指示的RNP范围内。即如果RNP为2 n mile(RNP2),那么95%的时间里飞机将在指示位置为圆心2 n mlie为半径的圆内。对于RNP0.1,该圆的半径减至0.1 n mlie。为将95%RNP转换为3倍标准偏差(3σ),需乘以系数 1.225。尽管ANP可能优于RNP,仍使用保守的RNP用来确定该误差的垂直分量。通过VPA的正切值,水平位置误差将转换为垂直误差。如式(1)所示(单位:m)

航路点分辨率误差(WPR)。该误差是垂直航径定义误差的分量,它的出现是因为航路点的指示位置和实际位置稍有些差别。水平位置误差的保守估计值是18.3 m(60 ft),它是基于计算的坐标分辨率,FMS数据库的存储值和FMS的计算分辨率来确定的(单位:m)。

飞行技术误差(FTE)。审定和批准的飞行技术误差值为 22.8 m(75 ft)。
高度测量系统误差(ASE)。高度测量系统本身存在的误差。ASE方程由制造商根据飞行测试数据提供。通常的静压源误差由大气数据惯性基准组件(ADIRU)或大气数据计算机(ADC)来确定(m)

垂直角度误差(VAE)。FMS确定VPA时产生的误差,该误差保守地估计为不超过0.01°(3σ)

终端自动情报系统(ATIS)误差。假定由于0.5 hPa误差或0.02 in调定误差为6.1 m(20 ft)。
1.2.3 偏移误差
机体几何误差(BG)。根据下滑航径与轮子的距离8 m固定值及坡度角和固定40 m(或指定的值)半翼展计算得出。直线航段为固定值8 m(26 ft),曲线航段为

国际标准大气温度偏差(ISAD)。ISAD为偏移误差,即所指示高度的非标准温度的平均误差不为0。在低于标准温度时,飞机实际高度将低于指示高度;而高于标准温度时,实际高度高于指示高度。使用下列公式计算因温度偏差(ISAD)而导致的高度误差

式中:ISAD为误差量(ft);h为LTP的平均海拔高度(ft);Δh为高于 LTP 的高度(ft);ΔISA 为与标准温度的差值(℃)。
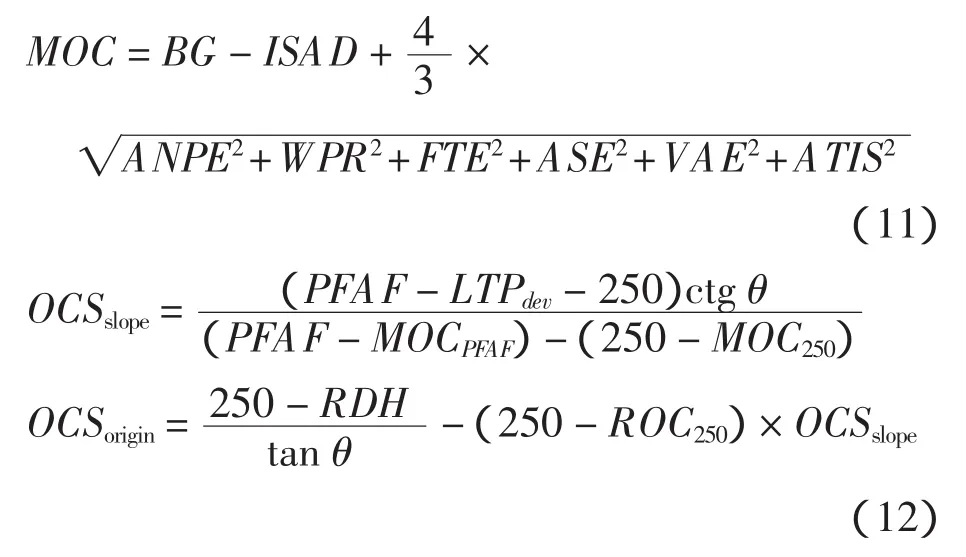
综合以上信息,考虑各误差因素可计算最小超障余度MOC、进近障碍物超障面(OCS)斜率和OCS面的起点到LTP的距离,有
2 拉萨机场最后进近航段MOC的确定
拉萨机场海拔高度3 570 m,高高原地区的气象变化难以预测。强风引起的扬沙发展迅速,严重影响低高度的水平能见度,同时地形扰动产生的动力乱流,导致颠簸和风切变。机场终端没有雷达监控,地面导航设备缺乏,进离场实行程序管制并且使用同一航路,造成大量的延误;机场附近的复杂地形、地貌限制了仪表飞行程序的设计,按照传统仪表设计方法制定的进离场程序,需要较大的程序设计梯度,甚至无法针对某些跑道设计仪表进近、离场程序。之前在拉萨机场的应急程序设计都是基于目视飞行气象条件,从而导致高高原机场的着陆天气标准远远高于平原机场通常使用的天气标准,这是影响正常运行的主要因素。
考虑设计变量:ΔISA=-20℃;RNP=0.14;翼展半宽=68 ft;二倍标准偏差的垂直飞行技术误差假定为75 ft(FTE=75 ft);终端自动情报服务(ATIS)二倍标准偏差高度表拨正的垂直误差假定20 ft(ATIS=20 ft);假定最大坡度角为 18°(φ = 18°);精密最后进近定位点高度(PFAF)为13 200 ft;着陆跑道入口点标高(LTPelev)(LTPelev=11 711 ft);飞越入口高(RDH,RDH =55 ft);下滑角 θ= 3°。
根据以上值进行计算

温度偏差为:

由于最后进近航段为直线航段,因此BG=8(m)

根据MOCFAF处OCS面的高和MOC250可计算进近障碍物超障面(OCS)斜率和OCS面的起点到LTP的距离为

3 最后进近航段设计需考虑的其他因素
在进行RNP AR的程序设计时,除需考虑侧向保护、垂直保护、航空器类别和速度的限制、航空器的转弯半径、转弯坡度之外,还应当考虑航空器设备的要求以及应急程序等。
3.1 一台发动机失效返场程序设计
一台发动机失效返场程序的设计同样受到地形和地面导航设施的限制,目前拉萨机场的一发失效程序基于目视飞行气象条件,完全依赖飞行员目视飞行,要求很高的天气标准。使用RNP/RNAV概念设计的一台发动机失效返场程序与现有的程序比较,具有明显的优势。①RNP/RNAV运行可以充分根据地形特征,设计任意的曲线航段,在拉萨机场沿河谷走向设计的一台发动机失效返场程序更加安全,这一功能是传统仪表设计方法无法实现的;②RNP/RNAV一台发动机失效返场程序的设计可以依照仪表气象条件,降低起降标准;③RNP/RNAV一台发动机失效返场程序的设计,不再仅仅依赖飞行员的人工操作,而是能够充分利用自动驾驶和飞行指引仪等机载设备,以显著降低飞行员在发动机失效后的工作强度,减少操纵失误[1]。
3.2 飞行设备要求
RNP运行所要求的设备是根据运行的RNP类型来决定的。对RNP1和RNAV1而言,该设备要能在导航设备使用数据之前确认其传感器输入的数据,并且能依据所使用的传感器和滞后时间计算估计的位置误差。对RNP2,4,10,12.6和20而言,规定的RNP1设备是理想状况但不是必需的必备的。在水平方向上,飞行机组要能完全控制飞行以满足要求。因此,RNP RNAV的功能设备必须包括通过飞行管理操纵显示组件(FM CDU)飞行界面,反映导航、飞行计划、告警功能和RNP值数据库的基本的飞行显示和机组告警系统。
在正常航班飞行实施进近时,垂直剖面尽量不要高,在IAF点核实QNH的数值,检查两部指示上相差小于75 ft(局方要求是100 ft),以便在VIP点,FINAL APP接通在正确的垂直坡面上。在VIP点之前按压APP,接通APP NAV方式,预位FINAL APP方式。类似于盲降,通过VIP点后,当切入下滑坡面后,检查FINAL APP方式接通,并调整好复飞高度。建立全形态最晚时机为13 700 ft,全形态建立后接通APU引气。注意20 000 ft收放襟翼限制。
4 结语
依据RNP AR的仪表进近程序设计准则进行的最后进近航段设计,可以降低地形复杂机场的起降天气标准,使09L跑道的能见度标准由原来目视进近的8 000 m减小到RNAV(RNP)进近的5 000 m,降低决断高度,减少备降返航的发生,提高飞行正常率,减小无效飞行。RNP进近程序实施后,09L跑道也可以实现仪表进近。
要求授权RNP进近(RNP AR APCH)运行规范适用于需要较高导航性能要求的机场进近运行,如地形复杂的机场,同时要求运营人必须满足额外的对飞机及机组的要求并获得局方的运行授权。要求授权RNP程序比其他区域导航程序具备更大的运行及安全优势。通过采用更高的导航精度、完整性以及可控能力要求,将大大提高运行安全性,降低可控撞地(CFIT)的风险。
[1]曾 明.RNP进近方法的优缺点[J].中国民用航空,2010(120):31-34.
[2]中国民航局.要求授权的RNP仪表进近程序设计手册[G].中国民航局,2006.
[3]ICAO.ICAO Doc 9613,ICAO基于性能的导航技术手册[G].2007.
[4]中国民用航空局.PBN的详细介绍及其飞行程序设计 [G].中国民用航空局,2007.
[5]ICAO.PBN RNP AR Design Manual,ICAO Doc 9905[S].2009.
猜你喜欢
西华大学学报(自然科学版)(2022年2期)2022-03-17
计算机应用与软件(2021年6期)2021-06-21
现代信息科技(2021年21期)2021-05-07
计算机教育(2020年5期)2020-07-24
航空工程进展(2019年5期)2019-11-05
电子制作(2019年9期)2019-05-30
北京航空航天大学学报(2017年4期)2017-11-23
山东工业技术(2016年15期)2016-12-01
太空探索(2016年3期)2016-07-12
太空探索(2016年8期)2016-07-10
