
基于Matlab/Simulink与Adams/Car的车辆稳定性控制系统联合仿真
2012-11-22 06:45周红妮袁浩文
湖北汽车工业学院学报 2012年4期
周红妮,袁浩文
(湖北汽车工业学院 汽车工程系,湖北 十堰 442002)
在车辆稳定控制系统(VSC)的研究中,通过Adams和Matlab联合仿真将机械系统仿真与控制系统设计仿真有机地连接起来,从而实现机电一体化的联合分析,是目前进行车辆稳定控制控制策略开发的一种新思路。Adams和Matlab联合仿真,可使设计者利用虚拟样机对机械系统和控制系统进行反复的联合调试,直到获得满意的设计效果,从而大大提高设计效率、缩短开发周期、降低开发成本。所以,与传统的方法相比,联合仿真技术具有较为明显的优势。
本文基于一定的控制理论与控制策略,在Matlab/Simulink中进行车辆稳定性控制系统的设计,并在Adams/Car中建立相应的整车动力学仿真模型。最后利用Adams/Control接口,实现Matlab/Simulink与Adams/Car的车辆稳定性控制系统联合仿真。通过相应的仿真分析,验证联合仿真方法的可行性,为VSC系统控制策略的快速开发提供一定的参考。
1 联合仿真步骤
Adams用来建立联合仿真系统的机械模型并添加外部载荷及约束,Matlab/Simulink用来建立联合仿真系统的控制部分,Adams/Controls(控制模块)用来将两者连接起来,利用Matlab/Simulink的控制输出来驱动机械模型,并将Adams中机械模型的位移、速度等输出反馈给控制模型,实现在控制系统软件环境下的交互式仿真,还可以在Adams中观察仿真结果。联合仿真模型的建立需要4个步骤:1)建立机械系统模型,机械模型可以在Adams中直接建立,也可以输入已经建好的外部模型;2)确定Adams的输入变量和输出变量,使Adams和控制软件之间形成闭环回路;3)使用控制软件Matlab/Simulink建立控制系统模型,并将其与Adams机械系统模型连接起来;4)使用交互式或批处理方式对机械系统与控制系统相连的模型进行仿真。
2 Adams整车仿真建模
Adams/Car建模的一个主要特点是基于模板。Adams/Car的共享数据库里提供了包括各种悬架、转向系、动力总成以及车身的模板,因此在建模时,无需从零开始,可调用已有模板进行相应调整(如硬点位置),从而大大简化建模过程。如果Adams/Car中没有相应模板或模板不合适,这时就需用户在 “Template Builder”中自行创建。本文通过Adams/Car模块建立联合仿真的整车动力学仿真模型,如图1所示,模型包括双横臂式前、后悬架、齿轮齿条式转向器总成、动力总成、四轮盘式制动器、基于魔术公式的轮胎模型及车身等。表1为Adams/Car整车模型的基本参数。

3 控制系统的设计
控制系统的设计包括4个方面:控制系统车辆模型、理想车辆模型、前馈补偿控制器与反馈补偿控制器。本课题基于线性二次型最优控制理论,应用直接横摆力矩控制(DYC)方法,以质心侧偏角和横摆角速度为控制变量,设计了一种前馈—反馈补偿控制的车辆稳定性控制器,其中控制系统以线性二自由度车辆模型为基础,以4WS为期望的理想车辆模型,通过前馈补偿控制可使车辆的质心侧偏角趋于理想值,而反馈补偿控制可使车辆模型在较好地跟踪理想模型的基础上,有效抵抗外界干扰。详见发表的相关论文[1]。

表1 Adams/Car整车模型参数
3.1 设计控制系统的车辆模型
控制系统的设计,以线性二自由度车辆模型为基础,车辆运动方程为
式中:Mz为附加的横摆控制力矩。
即

3.2 4WS理想模型
在控制器的设计中,可根据4WS车辆模型来设计期望的理想模型。根据控制目标,稳态时质心侧偏角对前轮转角的响应趋于零,经推导理想模型的状态方程可写为

孩子说,他的妈妈一直听信祖辈的传言,说用左手不正常,代表愚笨。所以每当妈妈发现他用左手,都会立即阻止,粗暴地将他左手里的筷子、笔、玩具夺走,强行塞到右手,没有一句安抚和解释。历经无数次的干预之后,他右手的能力是得到了提升,但他的内心却多了一份不安:
3.3 前馈补偿控制
为使车辆的质心侧偏角趋于理想值,可设计一个前馈补偿控制器,补偿的附加控制横摆力矩与前轮转角的关系为

式中:Gff为前馈控制器的比例增益系数。
3.4 反馈补偿控制
为使车辆模型能很好地跟踪期望的理想模型,并有效抵抗外界干扰,在此设计了反馈补偿控制器。反馈控制器中实际质心侧偏角和横摆加速度与理想值的偏差为

根据上述偏差方程,可应用线性二次型最优控制算法,求解反馈补偿增益。设反馈补偿控制中的附加控制横摆力矩为:

式中:gfb1和gfb2为实际车辆模型与理想模型的状态偏差反馈增益,可由下面的方法确定:
设最小化性能指标函数为


式中:K为状态反馈矩阵;P为Riccati方程的解;E为闭环系统的极点;Q和R分别为状态加权矩阵和控制加权矩阵,可调节。
则总的附加横摆力矩为

在Matlab/simulink中建立控制系统仿真模型结构,见图2。
4 联合仿真模型的建立
Adams/Control接口可以实现Adams和Matlab/Simulink间的无缝集成,从而方便的把整车模型倒入Simulink进行联合仿真。利用Adams/Controls模块,首先将Adams/Car模型中定义的质心侧偏角、横摆角速度、方向盘转角和车速4个状态变量定义为Adams模型的输出变量,Matlab/Simulink中控制系统的计算得到控制横摆力矩定义为Adams模型的输入控制变量。
为将Adams中的整车模型输入到控制软件中,需定义输出接口,以便将整车系统多体模型输入到Matlab软件中,可供建立控制系统时使用。进入Matlab程序后在Matalab输入提示符处,输入adams_sys,显示adams_sys的模块,其中adams_sub即为Adams/Control中生成的整车模型求解文件,在Matlab程序中作为一个子函数被调用。
把整车模型调入Matlab/Simulink建立的车辆稳定性控制系统模型中,组成联合仿真模型(图2)。

5 联合仿真结果
分别以前轮转角阶跃输入与正弦输入,对控制系统的控制效果进行仿真分析。其中,阶跃仿真最能反映系统的稳定性控制效果,而正弦仿真可在分析系统稳定性的同时,进一步分析各参量对前轮转角的跟随特性。在车辆稳定性控制系统中,横摆控制力矩会直接影响到车辆的质心侧偏角、横摆角速度与侧向加速度这3个重要参量,故分析它们的变化是仿真研究的重点。
5.1 阶跃仿真结果
阶跃仿真中车速设置为100km·h-1,第1s开始,1s内方向盘转角 0°~90°。无控制(实线)和施加控制后(虚线)的联合仿真结果见图3,可以看出:与无控制比较,控制系统都能够有效控制车辆质心侧偏角和横摆角速度在稳定的范围内,侧向加速度也没有超出侧向附着极限(默认仿真中车辆在良好路面行驶,侧向附着极限可视为1g=10000mm·s-2),施加控制优于无控制情况,控制系统能在一定程度上提高车辆的稳定性。
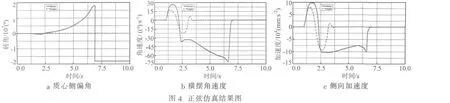
5.2 正弦仿真结果
正弦仿真中,车速设置为 100km·h-1,第 1s开始,2s内方向盘转角 0°~100°。 无控制(实线)和施加控制后(虚线),联合仿真结果如图4所示,稳定性控制效果与前面的阶跃仿真分析基本一致:1)2种工况下,控制系统都能够有效控制车辆质心侧偏角和横摆角速度在稳定的范围内,侧向加速度也没有超出侧向附着极限(1g),施加控制优于无控制情况。2)施加控制后,3个参量都能有效跟随前轮转角的变化,响应及时。

6 结论
本课题利用Adams/Car建立了整车仿真模型,在Matlab/Simulink中建立了一种基于前馈—反馈补偿控制的车辆稳定性控制器,并通过Adams/Control模块实现了两者之间的联合仿真。通过阶跃仿真和正弦仿真分析表明,与无控制相比,所设计的控制系统能有效控制车辆的稳定性,并验证了联合仿真方法的可行性,为VSC系统控制策略的快速开发提供了便捷途径。
[1] 周红妮,王莉,陶健民.一种基于前馈—反馈补偿控制的车辆稳定性控制系统仿真[J].湖北汽车工业学院学报,2009(3):11-15.
[2] 冯樱,王保华,周红妮.基于联合仿真的汽车转弯制动ABS模糊控制研究 [J].湖北汽车工业学院学报,2010(2):12-16.
[3]冯樱,王保华.基于联合仿真的汽车操纵稳定性分析及控制研究[J].湖北汽车工业学院学报,2011(2):4-8.
[4] Motoki Shino,Masao Nagai.Yaw-moment control of electric vehicle for improving handling and stability [J].JSAE Review,2001,22:473-480.
[5] Motoki Shino,Masao Nagai.Independent wheel torque control of small-scale electric vehicle for handling and stability improvement[J].JSAE Review,2003,24:449-456.
[6] 周红妮,陶健民.车辆稳定性控制策略研究[J].湖北汽车工业学院学报,2007(1):26-31.
[7]周红妮,陶健民.质心侧偏角与横摆角速度对车辆稳定性的影响研究 [J].湖北汽车工业学院学报,2008(2):6-10.
[8] 陶健民.车辆稳定性控制策略之比较 [J].湖北汽车工业学院学报,2005(1):1-5.
[9] 罗俊,陶健民.车辆稳定性的滑模变结构控制研究[J].湖北汽车工业学院学报,2005(3):17-21.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
物理教学探讨(2018年1期)2018-02-13
解放军健康(2017年5期)2017-08-01
知识经济·中国直销(2016年2期)2016-11-07
探测与控制学报(2015年4期)2015-12-15
航天器工程(2014年5期)2014-03-11
