基于模糊控制的PID控制器研究
2012-11-15 06:46:18梁燕
中国科技信息 2012年9期
梁燕
广州科技职业技术学院汽车工程系,广州 510550
基于模糊控制的PID控制器研究
梁燕
广州科技职业技术学院汽车工程系,广州 510550
在工业控制过程中,由于被控对象具有时变、非线性、不确定等因素,常规PID控制算法难以满足控制要求。本文设计了一种模糊PID控制器可实现对该类工业对象的控制,利用模糊推理在线整定PID控制器的3个参数Kp、Ki、Kd。通过仿真实验,表明该控制器取得了较好的快速性和稳定性。
模糊控制;在线整定; PID
fuzzy control; on-line setting; PID
PID控制器由于结构简单、稳定可靠、无静差等优点, 在工业控制领域得到了广泛的应用。但在实际工业过程中往往存在很多不确定和非线性因素,尤其当被控对象的参数发生变化时,很难建立比较精确的数学模型,常规PID控制难以达到理想的控制效果。本文针对这一问题,设计一种模糊PID控制器,运用模糊规则来进行推理和决策,在线整定PID控制器的3个参数,以实现工业对象的优化控制,仿真结果表明这种设计方法是有效可行的。
1 常规PID控制器
常规PID控制器可用算式描述为:

式中,Kp、Ki、Kd、分别为比例、积分、微分系数。这三个参数对系统的性能会产生不同程度的影响。
比例系数Kp 能够提高系统的响应速度和精度。Kp 越大,使系统的响应速度加快,调节精度提高,若系数过大,则会加多系统振荡次数,而且容易产生超调,使系统趋于不稳定。若比例系数取值过小,则减缓响应速度、降低调节精度,使系统动、静态特性变差。
积分系数Ki 用于消除系统静差。Ki越大,系统的稳态误差就消除的越快,但若过大,会出现积分饱和现象,从而造成较大超调,甚至会引起振荡。但若Ki 过小,系统稳定性就差,误差将影响系统的调节精度。
微分系数Kd 用于改善系统的动态性能。系数偏大或者偏小时,都会造成较大的超调、过长的调节时间, Kd合适时,才能使系统得到较好的动态效果。
2 Fuzzy-PID控制器的原理
比例、积分、微分参数对PID控制器影响很大,但是传统PID参数整定方法比较繁杂,而且整定不良,对实践工况的适应性较差。因此,利用模糊规则在PID参数预整定的基础上,实时在线整定PID控制器的3个修正参数ΔKp、ΔKi、ΔKd, 实现对具有时变、非线性、不确定工业对象的优化控制。根据模糊数学的理论和方法,把操作人员调整的经验和技术知识总结成为IF(条件)THEN(结果)形式的模糊规则,然后把这些模糊控制规则及相关信息存入计算机知识库中。根据工业对象的响应情况,计算出采样时刻的偏差e及偏差的变化ec,输入控制器,运用模糊推理,进行模糊运算,即可得到该时刻的Kp、Ki、Kd,实现对PID参数的最佳调整。Fuzzy-PID控制器的结构和原理如图1所示。
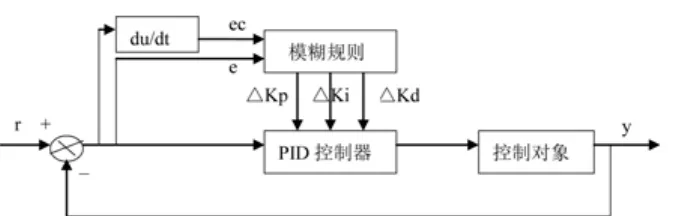
图1 Fuzzy-PID控制器的结构图
3 Fuzzy-PID控制器的设计
3.1 模糊化
模糊控制器的输入、输出变量都是精确量,而模糊推理是针对模糊量进行的。因此,首先要对输入量进行模糊化处理。输入、输出变量均分为7个语言值:{NB、NM、NS、ZO、PS、PM、PB},隶属度函数采用灵敏度较强的三角函数。为增强系统的鲁棒性,提高隶属度函数的分辨率,在0值附近的函数形状较陡, 各变量的模糊量分别为E、EC、ΔKP、ΔKI、ΔKD,其论域均为[-6,6]。如图2。
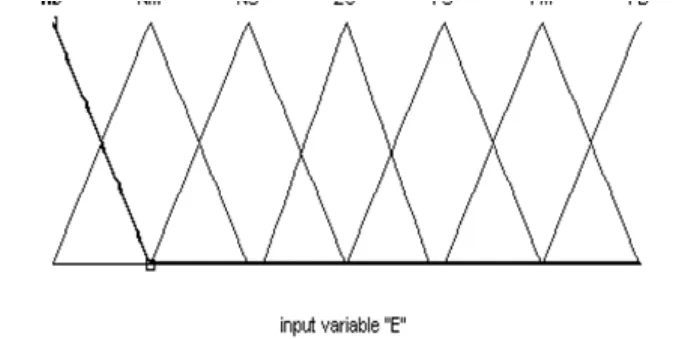
图2 隶属度函数
3.2 模糊推理
比例、积分、微分参数的整定规则根据操作人员及专家经验知识的总结而成。
对于比例环节,控制规则见表1,当偏差|e|较大时, Kp取大值,来提高系统的响应速度;偏差|e|较小时, 减小Kp,避免超调过大引起振荡;在偏差很小时, 继续减小Kp,确保系统尽快稳定。而且要考虑ec,当ec和e符号相同时,输出则向偏离稳定值方向变化,要适当增加Kp;反之, 则适当减小Kp。
积分环节, 控制规则见表2,当偏差|e|大或较大时, Ki取0值,防止系统超调,;当|e|较小时,积分环节有效,随|e|的减小而增大,消除稳态误差,提高系统的控制精度。
微分环节, 控制规则见表3,当偏差|e|较大时,为防止偏差瞬间变大,导致微分溢出,Kd取小值;在偏差较小时,考虑到系统的抗震能力和响应速度,Kd适当取值。
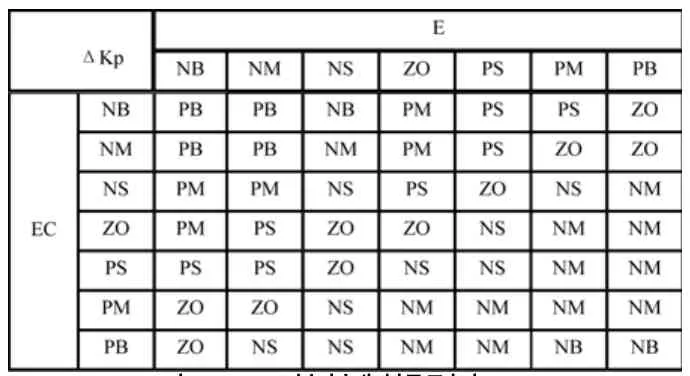
表1 ΔKp参数调整规则表
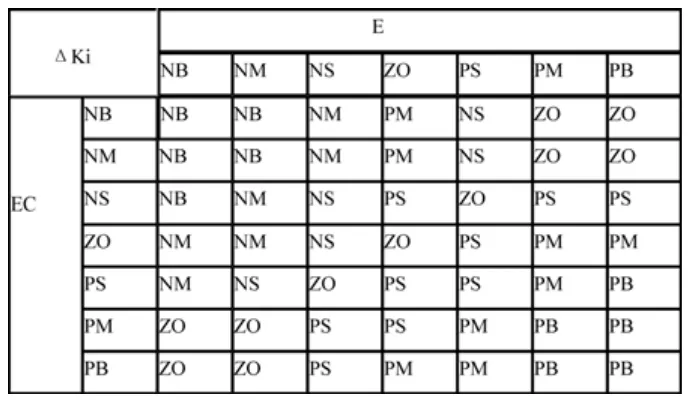
表2 ΔKi的控制规则表
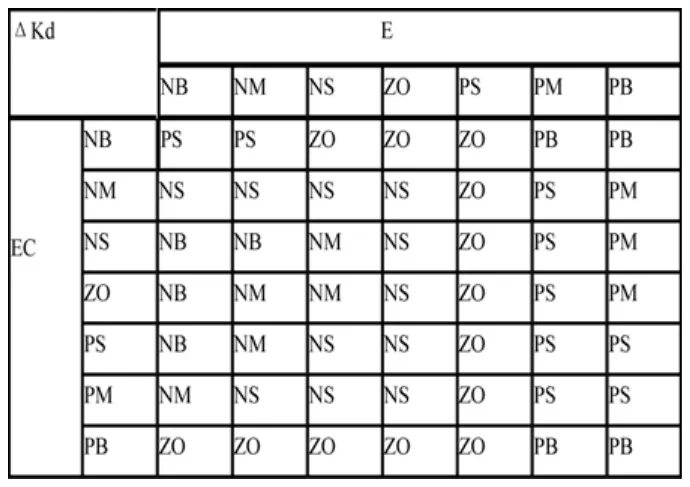
表3 ΔKd控制规则表
3.3 去模糊化
经模糊推理后,整定的3个修正参数要进行去模糊化,得到精确量用来计算输出控制量。去模糊化有最大隶属度法、面积二分法、重心法等几种方法。本控制器,采用面积二分法求取输出量的精确值,输入到PID控制器的参数由式计算得出:

4 仿真实例
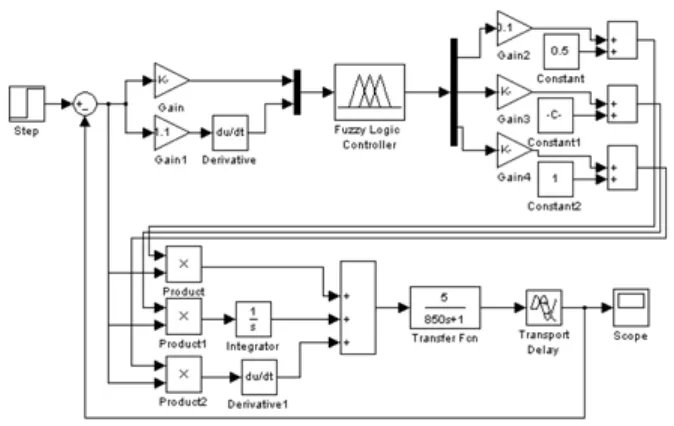
图3 Fuzzy-PID控制
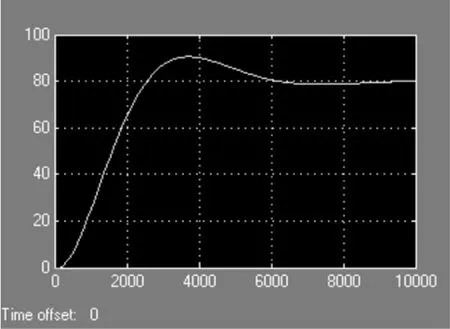
图4 T=850S时常规PID控制
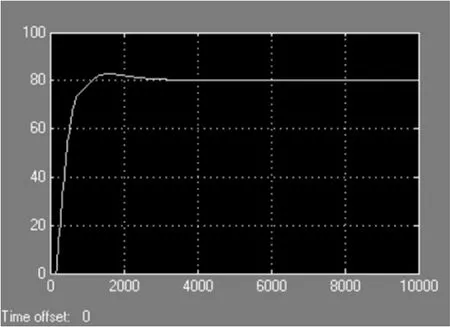
图5 T=850S时 Fuzzy-PID控制
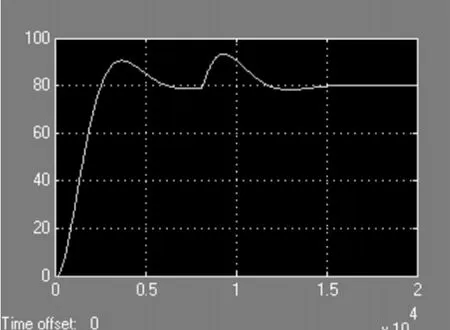
图6 加入干扰后常规PID控制
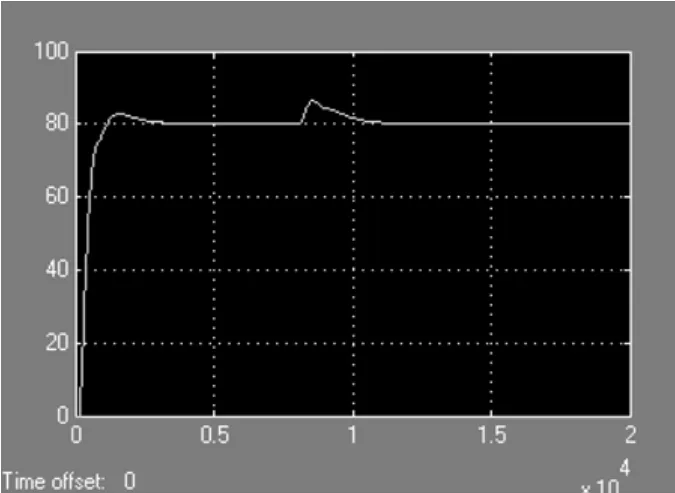
图7 加入干扰后Fuzzy-PID控制
模型的目标值为80℃,采样周期为20S,时间常数为850S时的仿真结果表明Fuzzy-PID控制比常规PID控制的超调量减小,上升时间减小了近1000S,调节时间也相应缩短;在8000S加入干扰信号后,可以看出模糊PID具有良好的动态响应特性和较好的抗干扰性能,取得了比传统PID更高的快速性和稳定性。
[1]郑美茹. 模糊PID控制器的仿真研究[J].装备制造技术,2011(4).74~76
[2]诸静.模糊控制原理与应用[M].北京:机械工业出版社,1995.
[3]耿瑞.基于MATLAB 的自适应模糊PID 控制系统计算机仿真[J].信息技术,2007(1)43~46.[4]刘金琨.先进PID控制MATLAB仿真[M].北京:电
Analysis of PID Controller Based on Fuzzy Control
LIANG Yan Guangzhou Vocational College of Scinence and Technology Department of automotive
engineering Guangzhou 510550
In the industrial process control ,traditional PID control doesn’t meet the control demand ,because of the time-change, nonlinear and uncertainty of controlled parameter. The paper designs a fuzzy PID controller can achieve the object of that type of industrial control. Fuzzy consequence is used to set the three parame-ters of PID controller Kp、Ki and Kd on-line. The results of practical running show that the controller can obtain the better speediness and stability.
10.3969/j.issn.1001-8972.2012.09.047
猜你喜欢
电子设计工程(2022年15期)2022-08-17 10:07:16
厦门大学学报(自然科学版)(2022年4期)2022-07-15 08:58:40
数学物理学报(2021年2期)2021-06-09 08:54:26
现代装饰(2020年7期)2020-07-27 01:27:50
光通信研究(2020年2期)2020-06-15 07:42:58
运筹与管理(2019年10期)2019-12-17 06:07:12
数学物理学报(2019年5期)2019-11-29 07:46:34
科技创新与应用(2019年17期)2019-06-09 08:38:29
广东技术师范大学学报(2016年5期)2016-08-22 09:07:22
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19 06:55:30