
基于Kalman滤波的塔筒GPS监测系统
2012-11-14 10:52陈显龙艾为桂
测绘通报 2012年8期
肖 成,陈显龙,艾为桂
(1.上海恒桦可力科技发展有限公司,上海200333;2.北京恒华伟业科技股份有限公司,北京100011;3.武汉大学电子信息学院,湖北武汉430072)
基于Kalman滤波的塔筒GPS监测系统
肖 成1,陈显龙2,艾为桂3
(1.上海恒桦可力科技发展有限公司,上海200333;2.北京恒华伟业科技股份有限公司,北京100011;3.武汉大学电子信息学院,湖北武汉430072)
介绍一种基于Kalman滤波的塔筒GPS监测系统,用于监测塔筒在不同环境、各种载荷作用下的工作性能,采用Kalman滤波原理对GPS监测数据进行处理分析。采用米度测控单双频自动变形监测系统研发的监控中心软件,对风电场塔筒进行安全监测管理。经过工程试验和数据分析,说明利用GPS可以有效、准确地监测塔筒工作状态,为风电场塔筒的承载能力、工作状态和耐久性评估提供参考依据。
GPS;塔筒;监测;Kalman滤波
一、引 言
风能是现今世界各国都十分重视开发和利用的一种绿色能源。风电场塔筒是风力发电的塔杆,在风力发电机组中起支撑作用,同时吸收机组震动。要保证风力发电机组的正常运转,就必须保证塔筒结构的安全可靠。风电场风力发电塔筒不仅受到自身重力、风轮和机舱的重力、作用在塔身上的风载荷,还受到通过风轮作用在塔筒顶端的气动载荷、偏转力、陀螺力和陀螺力矩等。塔筒轴心倾斜度、振动频率及振幅都是塔筒结构健康状况的重要参数,对这些参数进行实时监测可以检测塔筒能否正常使用。
加速度传感器法、位移传感器法和全站仪自动扫描法是现今常用于结构动态变形监测的几种方法。但传统的观测技术受其能力所限,已经不能满足大型构筑物动态监测的需求。随着现代硬件技术、数据处理技术以及通信技术的发展,一门新兴技术——GPS监测技术逐渐发展起来,国内外运用GPS监测技术对建筑物的实时健康监测也日渐增多,如加拿大Loves等于1993年对高160 m的卡尔加里塔用GPS进行了强风作用下的振动测量;德国Breuer等于1999年对高155 m的电视塔进行了风载荷作用下的振动测量;陈永奇等于1999年对高325 m的深圳地王大厦进行了二次振动测量;过静珺等于2000年对虎门大桥进行GPS实时位移监测等。尤其是近几年,GPS监测技术在对高耸构筑物监测方面得到了较大的发展和突破。
本文介绍了一种全新的基于Kalman滤波的塔筒GPS监测系统,用于监测塔筒在不同环境、各种载荷作用下的工作性能,并通过监控中心软件对GPS监测数据进行处理分析,对风电场塔筒进行安全监测管理。
二、工程概况
本文以实际工程为基础,设计的基于Kalman滤波的塔筒GPS监测系统是一个集结构分析计算、计算机技术、通信技术、网络技术、传感器技术等高新技术于一体的综合系统工程,旨在创建一个功能强大并能真正长期用于结构损伤和状态评估、满足位移监测的需要,同时又具经济效益的结构健康安全的监控系统。
基于Kalman滤波的塔筒GPS监测系统,建立了实时的安全监测平台,对塔筒的振幅、频率、中心点位置进行实时监控;可实时记录塔筒在外部因素(风力、风向、温度、湿度等)下的运行状态,建立结构本身健康档案;可验证风筒结构设计理论,为完善设计理论和开创新的设计方法提供试验依据;同时也可实现动态的结构危险性分析、评价和预警,为风电塔筒的运营管理、养护维修、可靠性评估及科学研究提供技术依据。
本风电场塔筒GPS监测系统由4个子系统组成:传感器子系统、数据传输子系统、监控中心子系统、辅助支持子系统。本文根据设计原则和设计依据,从4个子系统建设出发,分别进行系统设计。根据试验现场的实际情况,拟布设两个GPS基准站和30个塔筒监测点。该系统整体模块如图1所示。
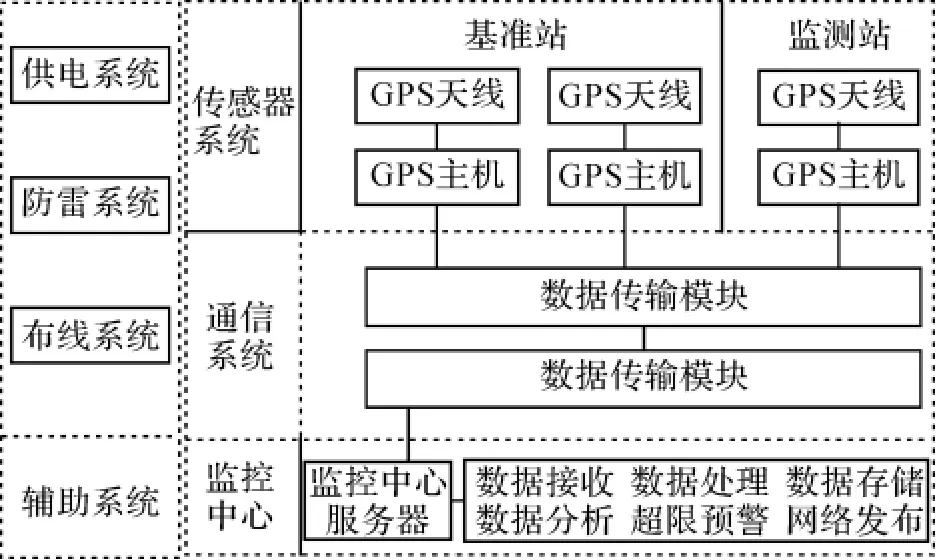
图1 系统整体模块图
1.传感器子系统
本文设计的监测系统中,传感器子系统由布置在风电场办公室附近的GPS基准站和安装在塔筒顶部GPS监测点组成,系统选用米度测控监测专用GPS双频接收机。
GPS基准站的建设主要包括站址选择、基建、仪器设备的选择及设备安装。监测点GPS天线安装到塔筒顶部合适的位置,GPS主机置于塔筒顶部的机柜内。GPS天线和GPS主机之间通过同轴电缆连接。
2.数据传输子系统
在本系统设计中,基准站和各塔筒监测点到控制中心采用光纤进行通信,具有通信稳定、数据传输速率高、误码率较低的特点。
3.监控中心子系统
监控中心子系统由布置在监控中心的小型机系统、服务器系统及软件系统组成。监控中心机房建设按照国家相关规范设计施工,主要设备有电视大屏、监测结果显示终端、服务器群、网络设备、UPS电源、软件管理平台、报警装置、防雷接地系统及辅助设备等。中心平台对各系统所采集的数据、预处理信息、处理结果等自动存储备份。监控中心平面布置如图2所示。
4.辅助支持子系统
辅助支持子系统包括外场机柜、外场机箱、配电及UPS、防雷和远程电源监控等部分。
本系统试验中,需要供电的设备有控制中心服务器及辅助设施,各基准站、监测站GPS接收机及辅助设施。根据各项设计原则,同时考虑本系统供电环境,对控制中心设备和各GPS接收机选用不同的供电方式,控制中心选用220 W交流电,并以UPS作为备用电源,同时UPS也起到稳压的功能;监测点和基准站采用太阳能供电,每个点配备150 Ah的蓄电池,可在阴雨天气下持续运行1周。
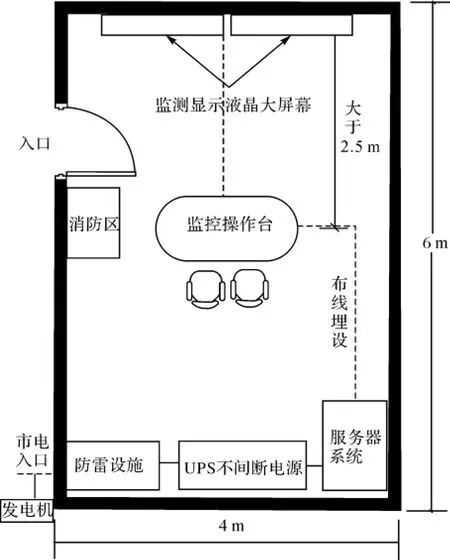
图2 监控中心平面布置图
监测系统中各监测站及通信系统由于潜在雷击危害因素,还要考虑防雷措施,分为直击雷的防护和感应雷电防护。GPS天线和接收机附近必须安装避雷针,对直击雷进行防护。本系统需要进行感应雷防护的分别为各GPS接收机和控制中心各设备,对于各GPS接收机内部电路板设计2000 kV的光电隔离电路板,当遇到大电流时它会自动切断电源。对于控制中心各设备需要采用防电涌设备,即在空气开关后端并联一个单项电源避雷器,作为电源部分的避雷,同时电力线在进入UPS之前,同时加装防电涌防护设备,隔离UPS和电力线。具体避雷器推荐选用四川中光的ZGB148A-40防电涌设备和ZGG40-385型号单项避雷器。
5.监测设计原则及技术依据
(1)监测设计原则
本文介绍的基于Kalman滤波的塔筒GPS监测系统,设计遵循科学合理性原则、经济实用性原则和系统可扩展性原则。监控对象的选取有科学和法律依据,监控手段的选取有高科技含量,监控效果准确有效。在保证长期可靠有效的前提下,采用最经济的方案,操作采用最简洁的使用方法,做到直观方便、性能稳定及维护简单。系统还设计有开放性接口,便于功能扩充和监测成果的开发利用,并支持其他监测设备数据分析、人工巡检记录等。
(2)监测技术依据
本文介绍的系统方案设计,涉及以下相关规范:《全球定位系统测量规范》(GB/T 18314—2009)、《全球定位系统城市测量技术规程》(CJJ 73—1997)、《精密工程测量规范》(GB/T 15314—94)、《建筑变形测量规程》(JGJ/T 8—2007) (GPS)、《工程测量规范》(GB 50026—2007)、《混凝土结构设计规范》(GB 50010—2010)、《建筑物防雷设计规范》(GB 50057—2010)等。
三、动态特性监测系统监控中心软件设计
监控中心子系统软件是本文介绍的基于Kalman滤波的塔筒GPS监测系统的主体软件,采用的是GPS实时解算软件技术,核心算法设备采用米度测控单双频自动变形监测系统(简称AMS)。
该监控中心软件使用由上海米度测控科技有限公司自主研发的全天候检测系统,利用全球卫星定位技术进行高精度三维空间变形监测,通过核心算法实时解算监测点的毫米级三维坐标。实现各种功能应用的同时,建立数据库进行管理和操作,并实时在界面上更新状态日志。系统软件结构如图3所示。
四、结束语
经过现场试验,用本文介绍的监测方法位置采样率为1~5 Hz可选。塔筒静止状态监测精度:平面精度为±3 mm,高程精度为±6 mm;塔筒风载震动中实时监测精度:平面±10 mm,高程±20 mm。
利用本文介绍的基于Kalman滤波的塔筒GPS监测系统,不仅可以准确地掌控塔筒在常规载荷作用下的工作性能,而且能够掌握塔筒在各种极端载荷作用下的工作状态。该监测系统能实现数据自动采集,也能实时解算输出塔筒振幅、频率及塔筒中心位置,同时系统还有数据存储及处理分析功能、综合预警功能、防雷及抗干扰功能、现场网络数据通信和远程通信功能,以及其他数据备份、掉电保护、自诊断及故障显示等辅助功能。
在线监测系统软件能够安全监测管理分析模块,具备基础资料管理、各项监测内容适时显示发布、图形报表制作、数据分析、综合预警等功能。其中数据分析部分包括各项监测内容趋势分析、综合过程线分析等内容。
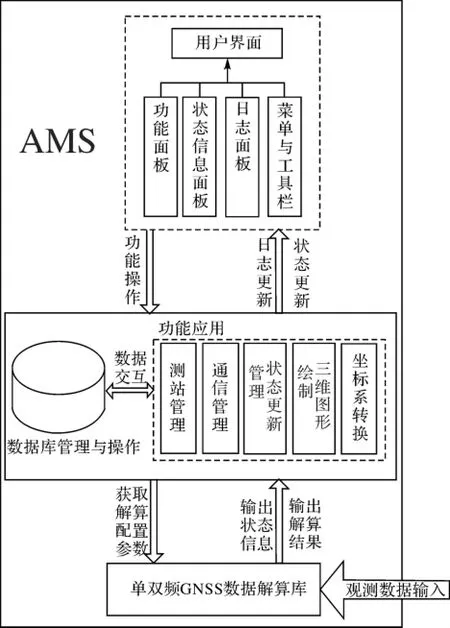
图3 AMS系统结构图
[1] XIAO Guiyuan,LIU Lilong,Chen Qiuguang.Using GPS for Dynamic Monitoring Tall-building’s Structures Based on Wavelet Analysis[C]∥Seventh International Conference on Natural Computation.Shanghai:[s.n.],2011: 316-319.
[2] 袁东,孙成城,王嘉杨.高层建筑动态变形的GPS监测技术[J].合肥工业大学学报:自然科学版,2005,28(8):926-930.
[3] 张献州,熊永良,牟朝云.电视塔中心线垂直度及塔身扭转GPS监测方法[J].测绘学院学报,2003,20(2): 86-88.
[4] 独知行,靳奉祥,梁勇.利用GPS监测数据确定建筑物的刚性运动状态[J].测绘通报,2002(5):4-6.
[5] 黄声享,刘经南.GPS监测系统基准形变分析与动态随机模拟[J].武汉测绘科技大学学报,2000,25(6): 485-489.
[6] 黄声享,李沛鸿,杨保岑,等.GPS动态监测中多路径效应的规律性研究[J].武汉大学学报:信息科学版,2005,30(10):877-890.
[7] LU Weicai,XU Shaoquan.Research on Kalman Filtering Algorithm for Deformation Information Series of Similar Single-difference Model[J].Journal of China University of Mining and Technology,2004,14(2):189-194,199.
[8] ANGHEL A.Near Real-time Monitoring of the Ionosphere Using Dual Frequency GPS Data in a Kalman Filter Approach[C]∥IEEE International Conference on Automation,Quality and Testing,Robotics.Romania:IEEE, 2008:54-58.
[9] 李旋,戴吾蛟,田晓振.小波去噪在GPS动态监测数据处理中的应用[J].测绘信息与工程,2007,32(5): 44-45.
[10] 马攀,文鸿雁.离散卡尔曼滤波用于GPS动态变形数据处理[J].桂林工学院学报,2002,22(3):234-238.
[11] 余学祥,张华海,吕伟才,等.Kalman滤波在GPS监测网中的应用[J].工程勘察,2000(4):33-35,63.
The GPS Monitoring System of Tower Based on Kalman Filter
XIAO Cheng,CHEN Xianlong,AI Weigui
0494-0911(2012)08-0028-03
P228.4
B
2012-06-28
肖 成(1975—),男,甘肃张掖人,主要从事测绘地理信息与智能电网集成应用方面的研究工作。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2018年8期)2018-11-10
价值工程(2018年7期)2018-02-08
现代电子技术(2017年23期)2017-12-20
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
新媒体研究(2014年6期)2014-06-18
铁路通信信号工程技术(2014年1期)2014-02-28
电子设计工程(2014年20期)2014-02-27
