
无人机技术在新疆和田大面积地形图测绘中的应用
2012-11-14 10:52杨伯钢
测绘通报 2012年8期
杨伯钢,李 兵,李 雷
(北京市测绘设计研究院,北京100038)
无人机技术在新疆和田大面积地形图测绘中的应用
杨伯钢,李 兵,李 雷
(北京市测绘设计研究院,北京100038)
以新疆和田地区100 km2地形图测绘为例,论证无人机技术应用于大面积、困难、复杂地区地形图测绘的可行性,提出无人机技术应用于地形图测绘的多项技术关键及其改进方向。
无人机;地形图测绘;数字线划图;解析空中三角测量
一、引 言
随着信息化技术的高速发展,近几年来,无人机遥感平台以其灵活便捷、成本低廉等独特的技术优势已经广泛应用于各个领域中,尤其在测绘领域更是得到了空前的大发展,并逐渐成为提升测绘应急服务保障能力的重要手段。作为传统航空摄影测量手段的有力补充,无人机遥感平台已经成功应用于灾害应急处理、国土监察、资源开发等方面。但是,受多种因素的影响,目前国内无人机遥感平台主要以影像地图的快速获取为主,很少涉及基本比例尺地形图测绘任务,尤其是大面积、复杂地区的地形图测绘。
本文以北京援疆测绘工程为例,对无人机遥感平台在新疆和田地区大面积1∶2000比例尺地形图测绘中的成功应用情况进行介绍,就作业中的技术关键点进行重点阐述,并提出了无人机遥感平台在大范围地形图测绘方面的技术改进方向。
二、测区概况
和田位于新疆维吾尔自治区的最南端,地势南高北低,南枕昆仑山和喀喇昆仑山,北部深入塔克拉玛干沙漠。此次无人机航摄范围位于和田东南部洛浦县。洛浦县由山地、绿洲、沙漠组成,其中,山地占10.2%,平原绿洲占5.8%,沙漠占84%。测区气候环境恶劣,主要体现在气候多变且不规律,与平原地区相比,测区上空局部区域内以旋风为主,风向瞬间变化频繁,为航摄飞行带来了一定难度。
三、航摄资料获取
特殊的地理位置,决定了测区复杂的气候环境,大风对无人机飞行姿态控制是个极大的考验,直接影响着影像资料的获取。针对这种大面积、困难、复杂的测区情况,笔者选用了所在单位与北京华北光学仪器有限公司联合研制的具有较强稳定性和抗风能力的“华鹰”无人机航摄系统,主要技术参数如表1所示。
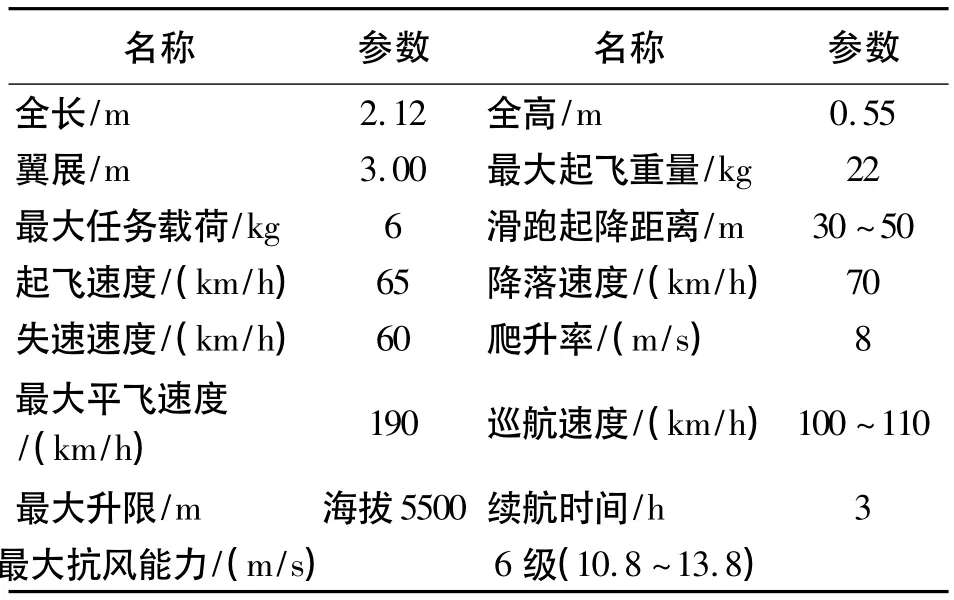
表1 无人机航摄系统技术参数
实际飞行时,不规则旋风对飞行姿态的影响比预想更严重,无人机会被瞬间抬升或压低,横向大风造成无人机翻滚、偏离航向严重。经过多次飞行试验的数据分析,总结了测区航飞规律,找到了最佳飞行窗口、旁向重叠度参数,对航线规划软件相关参数进行重新调整、设置,最终获得了较为满意的航摄资料。
四、航摄资料情况
洛浦测区面积约100 km2,其中沙漠、戈壁滩占80%,共38条航线,2500个像对。焦距:28.000 mm;像素大小:0.006 41 mm;像幅:X=36.000 mm,Y= 24.000 mm;摄影比例尺:1∶20 000。洛浦测区航迹图如图1所示。洛浦县城飞行一个架次共17条航线,洛浦北京工业开发区飞行2个架次共21条航线。
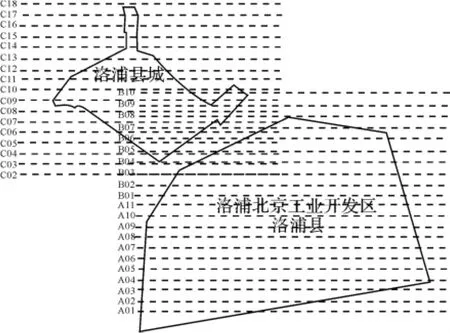
图1 洛浦测区航迹图
五、外控点布设方案
根据无人机航摄资料像幅小、像对多的特点,为了保证加密精度,经过比较分析,外业控制点布设采用了航向每隔8~10条基线布设1个平高点,旁向每隔两条航带布设1个平高点的区域网布点方式,在航区内均匀布设了189个野外控制点,并在加密分区角点及地物不明显区域,均采用了双控制点布设方式。外控点布设方案如图2所示。
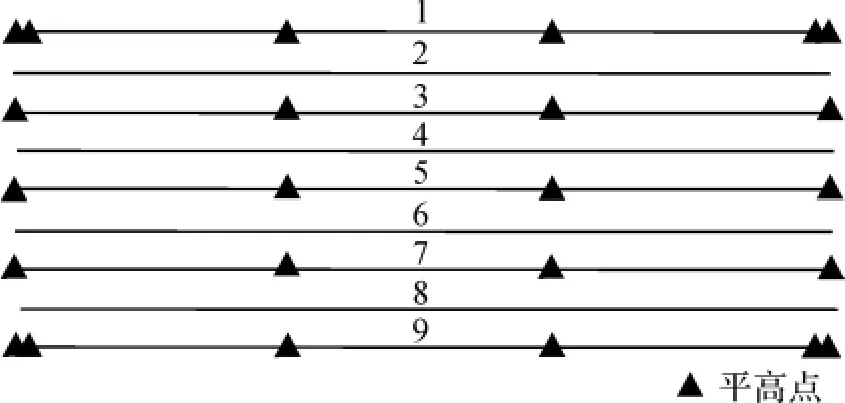
图2 外控点分布略图
六、解析空三
综合考虑矢量数据采集作业效率,洛浦测区共分为5个加密分区进行解析空三加密。测区内洛浦北京工业开发区大部分区域属于戈壁滩或沙地,同名地物点极其稀少,若是利用传统影像匹配算法,基本无法完成连接点自动提取。若是采用手工添加方式,工作量巨大,更是无从下手。本次解析空三连接点提取采用基于独特的多基线、多重匹配特征的影像自动匹配技术,并利用PAT-B进行粗差定位及剔除,取得了较好的效果。空三加密主要技术流程如图3所示。
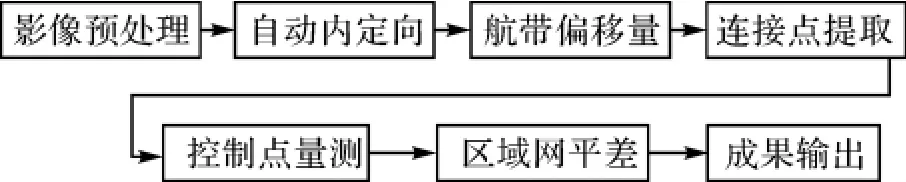
图3 空三加密主要技术流程
其中,影像预处理包括影像畸变差改正、影像灰度变换等。解析空三解算结果如表2所示。
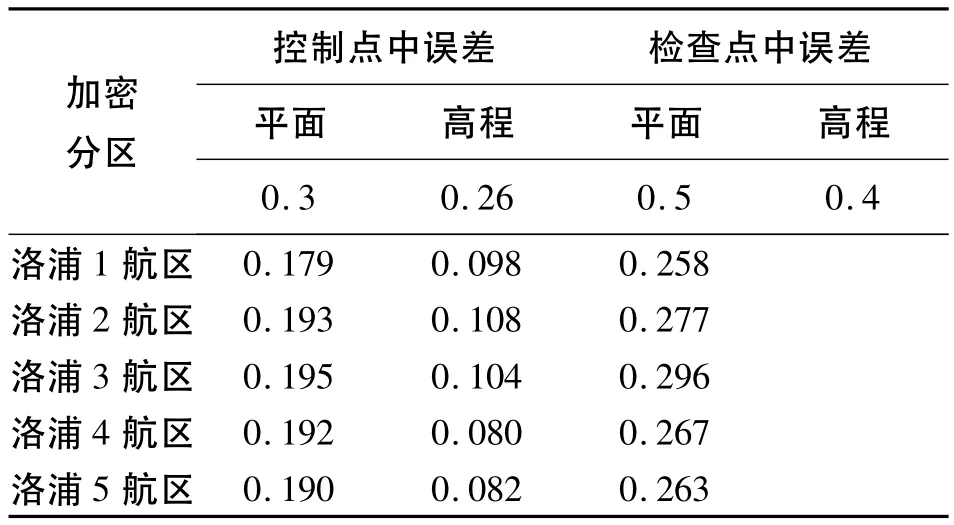
表2 洛浦测区解析空三成果 m
由表2可知,洛浦测区解析空三成果精度完全符合项目设计对解析空三成果的精度要求。
七、地形图测绘与精度检测
采用VirtuoZo、JX4全数字摄影测量系统进行矢量数据采集。内容包括:资料准备、内定向、相对定向、绝对定向、数据采集、图形编辑、接边和成果输出。
整个工程共投入15名作业员,利用14天完成了1∶2000数字线划图国家标准分幅122幅图的矢量数据采集工作,提交外业调绘成图。
地形图成果精度检测采用野外极坐标法,在测区范围内随机、均匀抽取了7幅图进行平面点位精度、高程精度检测,检测结果如表3、表4所示。
从检测结果可以看出,成果数据平面点位、高程精度完全满足项目设计要求,产品质量合格。
八、无人机航摄系统地形图测绘改进方向
无人机航摄系统作为传统航空摄影手段获取影像资料的有效补充,具有灵活机动、高效快速、精细准确、作业成本低等优点,在小区域和飞行困难地区高分辨率影像快速获取方面具有明显优势,要使无人机技术在满足应急服务保障能力的前提下,扩大应用范围,增加地形图测绘覆盖面积,目前的 无人机航摄系统还应在如下几个方面加以改进。
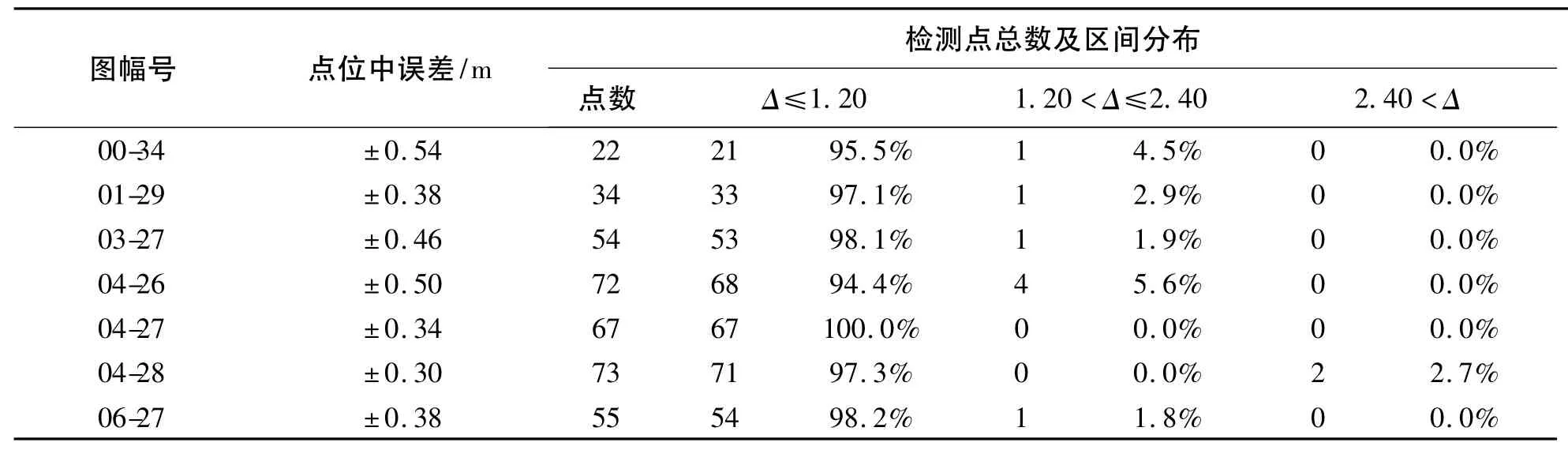
表3 平面点位精度检测统计表(成果限差为±1.2 m)
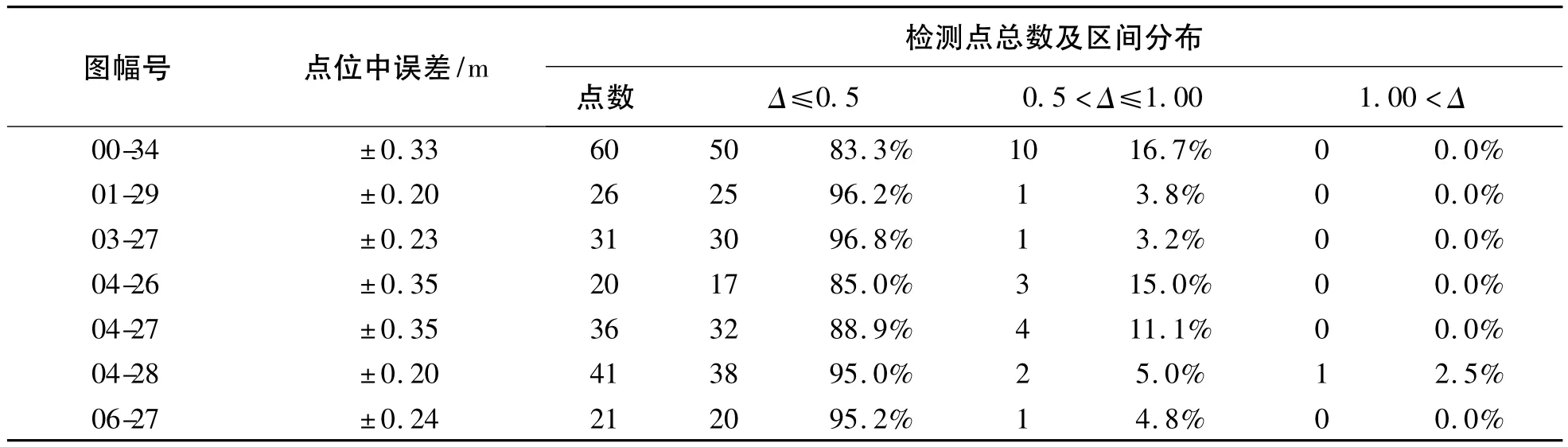
表4 高程精度检测统计表(成果限差为±0.5 m)
1)在保证灵活机动的前提下,适当提高任务载荷,提高空间姿态控制能力和参数记录能力。
2)加载大像幅/多镜头数码相机,提高影像幅面。
3)加装高精度POS系统,减少地面控制点数量,提高作业效率。
4)增强无线电通信数据传输能力,提高作业半径,扩大测区覆盖面积。
5)提高自主起降的精确性和安全性。
九、结束语
本文通过新疆和田洛浦地区地形图测绘实践,形成了无人机航摄系统应用于大面积1∶2000地形图测绘的生产工艺,使无人机技术应用于大面积、困难、复杂地区地形图测绘成为可能,在航摄飞行姿态控制、外控点布设、空三连接点提取等方面有所创新,对城市测绘院完成基本比例尺地形图做了有益的尝试,也为大面积地形图测绘增添了一种高效、低成本的测绘技术手段。
目前,虽然无人机航摄系统已经成功应用于影像资料的快速获取,但在较大面积地形图测绘方面还处于起步阶段。相信在不久的将来,随着无人机技术、传感器技术、通信技术的不断发展,数据资料后处理技术的不断完善,无人机航摄系统将在地形图测绘方面得到更广泛的应用。
[1] 李兵,祝晓坤,董明.基于PATB的DMC资料解析空三关键问题探讨[J].测绘通报,2007(6):33-36.
[2] 李磊,熊涛,胡湘阳,等.浅论无人机应用领域及前景[J].地理空间信息,2010,8(5):7-9.
[3] 洪宇,龚建华.无人机遥感影像获取及后续处理探讨[J].遥感技术与应用,2008,23(4):462-466.
[4] 林宗坚,孙杰.由小面阵CCD组合构成宽角航空相机[J].测绘科学,2005,30(1):94-98.
[5] 李兵,岳京宪,李和军.无人机摄影测量技术的探索与应用研究[J].北京测绘,2008(1):1-3.
[6] 王聪华.无人飞行器测控信息管理系统的研究与设计[J].测绘科学,2005,30(4):54-56.
[7] 王冬,冯文灏,卢秀山.Nikon D1X相机检校[J].测绘科学,2007,32(2):33-35.
[8] 程亚慧,林宗坚.轻小型组合宽角低空相机检校技术研究[J].北京测绘,2011(4):19-21.
The UAV Application to Large Area Topographic Mapping
YANG Bogang,LI Bing,LI Lei
0494-0911(2012)08-0021-03
P217
B
2012-06-21
地理空间信息工程国家测绘地理信息局重点实验室资助项目(201135)
杨伯钢(1960—),男,陕西西安人,博士,高级工程师,主要从事测绘地理信息技术应用研究工作。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
河北地质(2021年4期)2021-03-08
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
中国铁道科学(2019年5期)2019-10-19
测绘通报(2018年10期)2018-11-02
企业科技与发展(2018年5期)2018-09-10
西南医科大学学报(2016年4期)2016-01-03
中国医疗美容(2015年1期)2015-07-12
中国医疗美容(2015年5期)2015-02-03
