
多基线数字近景摄影测量在建筑立面提取中的应用
2012-11-14 10:51丁进选
测绘通报 2012年6期
丁进选,王 斌
(深圳市长勘勘察设计有限公司,广东深圳518003)
多基线数字近景摄影测量在建筑立面提取中的应用
丁进选,王 斌
(深圳市长勘勘察设计有限公司,广东深圳518003)
多基线数字近景摄影测量利用旋转或平行摄影方式,通过相邻光束交会角小来提高匹配精度和速度,以短基线大重叠度增加总体交会角来提高点位解算精度,为解决匹配、交会角和精度3者之间的矛盾提供了有效的途径,且具有不接触对象、精度高、外业简单等优点,被越来越多地应用于实际的工程中。最后采用多基线数字近景摄影测量完成某建筑物立面的提取,满足规范的要求,验证了多基线数字近景摄影测量具有良好的工程应用价值。
多基线数字近景摄影测量;自动匹配;交会角;精度;立面图
一、引 言
摄影测量是利用成像传感器摄取被研究对象的影像,通过对影像的处理,解译、分析获取对象的形状、尺寸、空间位置及与其他对象的空间关系等几何属性和对象的纹理等物理属性信息。近景摄影测量在工程测量中具有广泛的应用,具有外业工作量小、精度高、效率快、非接触等优点。
随着计算机技术的快速发展,特别是存储能力、运算效率的显著优化,以及数码相机的普遍使用和性能的大幅改善,使利用普通数码相机进行工程数字近景摄影测量成为可能。然而,传统数字近景摄影测量难以解决影像的自动匹配、交会角、点位精度之间的矛盾。一方面,其交会角小,虽然影像上同名点的匹配较易实现,但同名物点解算精度不高,特别是深度方向的精度比平面精度低一个数量级左右,很难满足高精度的工程应用要求;另一方面,传统的数字近景摄影测量主要采用单基线摄影测量方式,而由两幅二维影像所构成的“单基线”立体像对重建三维空间是一个“病态”问题[1-2]。如图1所示,当在右片匹配同名点有差异时,将分别交会于 A1、A点,深度方向中误差 mh=mx/tan θ,tan θ=B/H,θ为交会角,故mh=Hmx/B。可见,深度方向精度与基线成反比关系,基线越长,深度方向精度相应将会得到改善。
为了解决传统“单基线”数字近景摄影测量出现的矛盾,利用计算机视觉的“多目”观测代替人眼的“双目”观测,即空间一个点由两条以上光束交会,以取代传统摄影测量空间前方交会的基本法则[3]。如图2所示,空间点A由4条光束交会,相邻光束构成交会角V较小,有利于计算机的自动匹配,首尾光束构成的交会角U较大,则有利于提高点位深度方向精度。
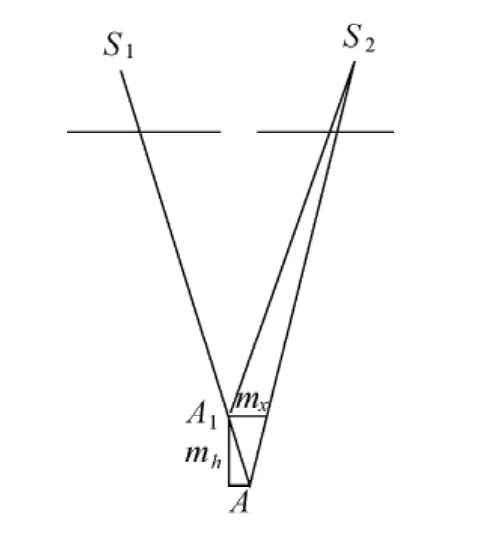
图1 单基线前方交会
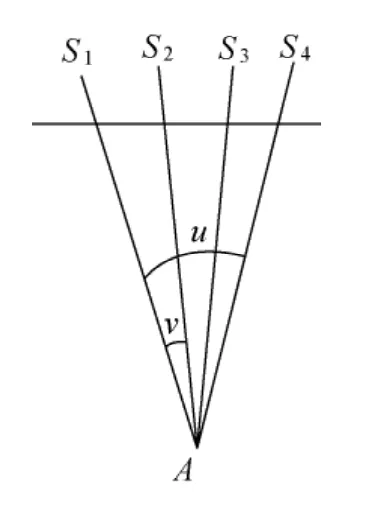
图2 多基线前方交会
本文首先分析了多基线近景摄影测量多片前交原理及精度影响因子,然后结合建筑立面提取工程实例进行介绍,验证了多基线数字近景摄影测量应用于建筑立面提取是可行的,且在地形图测绘、边坡监测、设备安装等应用领域具有广阔的前景。
二、多基线近景摄影测量多片前方交会原理
摄影测量是利用摄影获得的影像信息获取地物的空间几何和物理属性等信息的技术手段,共线方程为
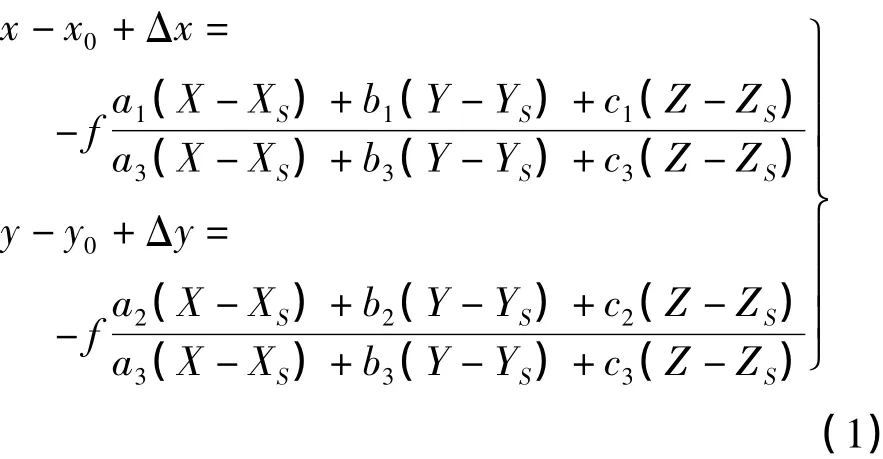
若已知相片的内外方位元素(x0,y0,f,φ,ω,κ,XS,YS,ZS)和畸变差(Δx,Δy),通过量测左右影像同名点坐标(x,y)、(x',y'),则可以通过点投影系数空间前方交会解算出地物点坐标(X,Y,Z)。
但这种方法并不适用于多基线立体影像多片前方交会,原因在于从传统“单基线”近景摄影测量获取的两幅影像上量取一对同名点交会空间点时没有出现多余观测。为了消除多条光束交会闭合差,一般采用光束法进行前方交会,其基本思路是根据已知内外方位元素的两幅以上的影像,把待定点的影像坐标作为观测值,解求其或然值,并逐点解求待定点物方空间坐标。对式(1)进行线性化,即得
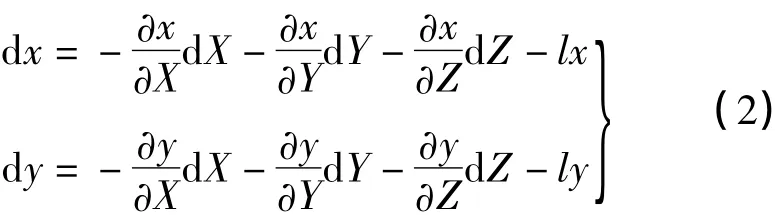
每个像点可以列立2个误差方程(如式(2)),若有n张序列影像,则同名像点可以列立2n个误差方程,即得式(3)

式中
则利用最小二乘可得x=(ATA)-1ATL,则物点坐标或然值迭代计算式为
三、影响精度因子分析
在试验中,由于使用边长相对控制,未进行控制点的联测,但对建筑物的立面图提取并无影响。因此,主要考虑摄影距离、基线长度和方向对多基线数字摄影测量的影响。
1)当摄影机镜头一定时,摄距与被摄对象在像幅中的成像比例有关,摄距越小,影像所占比例越大。摄影距离对物方空间点的解算精度有较大的影响,在满足被拍摄对象占整个像幅的2/3以上的条件下,拍摄距离越小解算精度越高。因此,在能覆盖整个摄区的情况下,应尽量选择较短的摄影距离,最好使被拍摄对象占满整个像幅。
2)相邻摄站间的基线长度应小于摄影距离的20%,以保证相邻摄站影像间的交会角小于10°,易于自动匹配;同时,首尾摄站间的基线长度应大于摄影距离的50%,以保证测区内影像间的最大交会角大于25°,从而保证交会精度。而在现场试验条件有限的情况下,两摄站间距取约为摄影距离的1/10,首尾摄站的间距选取约为摄影距离的1/2即可。
3)拍摄影像时基线应选择在摄区的中间位置,且基线的方向应尽量与被摄物平行,因为基线方向与被摄物夹角越大,变形越大,精度越低。
四、试验与分析
1.技术流程
以数码相机及测距仪(边长相对控制)为信息采集工具,采用旋转或平行多基线摄影方式,利用Lensphoto多基线数字近景摄影测量系统这一数据处理平台,实现建筑物的立面图的提取,其基本技术流程如图3所示。
试验使用Canon EOS 5D MarkII数码相机对某建筑物进行旋转摄影,相机参数通过纯平LCD平面格网已完成检校,参数如表1所示。

表1 28 mm焦距镜头内方位元素和畸变参数
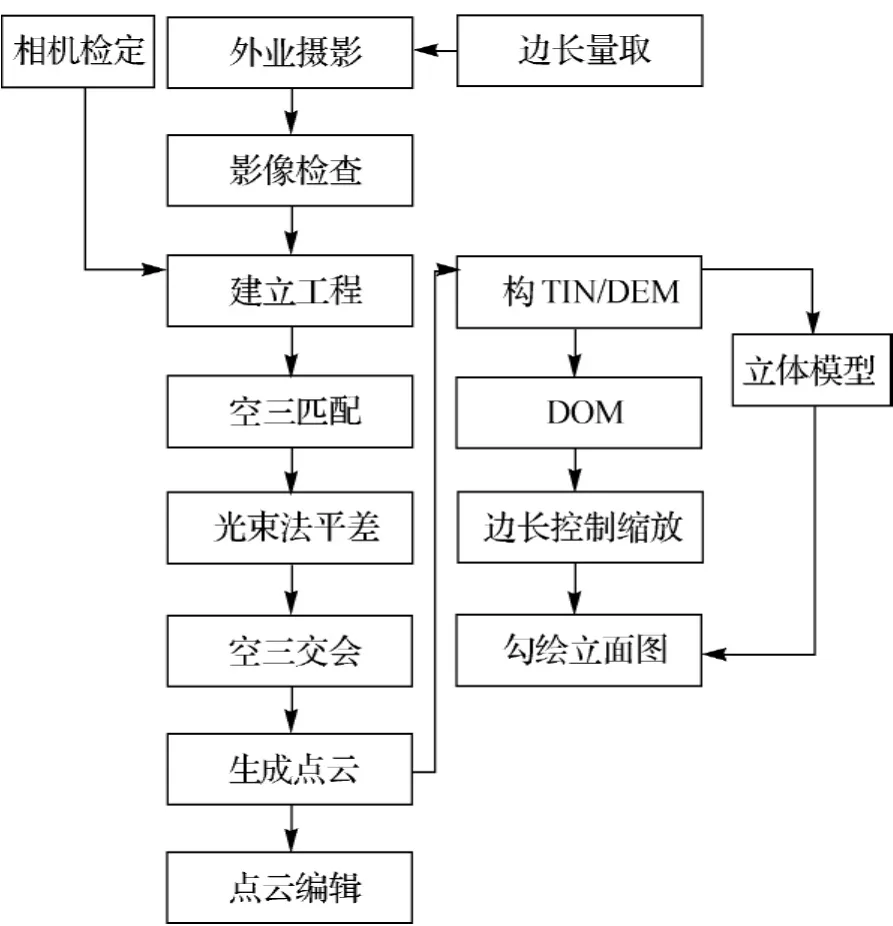
图3 建筑立面提取技术流程
2.外业量测与摄影
试验中摄距都小于100 m,均采用28 mm短焦广角非量测数码相机,且被测目标物为具有良好线性结构的建筑物,故综合采用边长相对控制平行正直多基线摄影方式。
试验1中摄距在15~16 m之间,应用了11个摄站,基线距为0.6 m左右,总基线长7 m左右;试验2摄距在50 m左右,共设有12个摄站,基线距为3 m左右,总基线长30 m左右。
同时,为了对测量的结果进行检核,对建筑物的门、窗、总长、总宽利用测距仪进行现场测量。
3.内业数据处理
利用Lensphoto多基线数字近景摄影测量数据处理平台对每个摄站摄取的影像进行相对定向(利用航带内匹配点),航带连接(利用航带间匹配点)生成自由航带网,模型上生成点云,点云编辑,生成DEM,构建立体模型或生成DOM,在立体模型或DOM影像上勾画DLG。图4、图5为试验1生成的点云数据视图和该建筑物的正射影像;图6、图7为试验2生成的点云视图和该建筑物的立体模型。
测距仪量测了相应窗、门、建筑物的宽和高等基本信息。图8为试验1勾绘的该建筑物的立面图,表2为边长检查精度表;图9为试验2勾绘的某建筑物的立面图,表3为边长检查精度表。
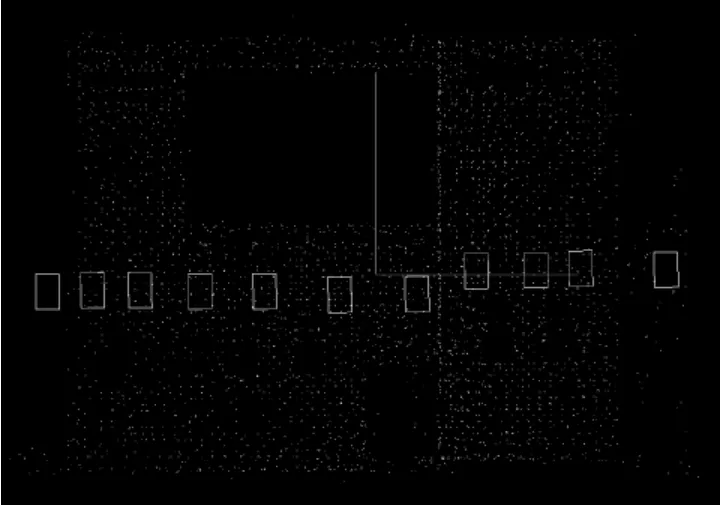
图4 某建筑物点云视图

图5 某建筑物正射影像图
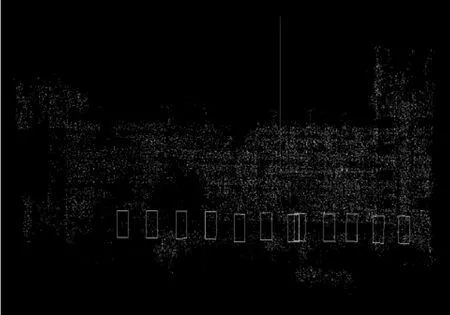
图6 某建筑物点云视图

图7 某建筑物立体模型
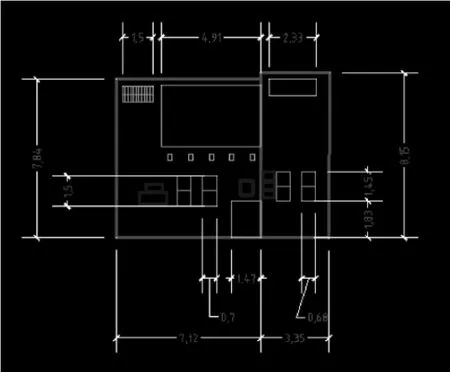
图8 某建筑物立面图
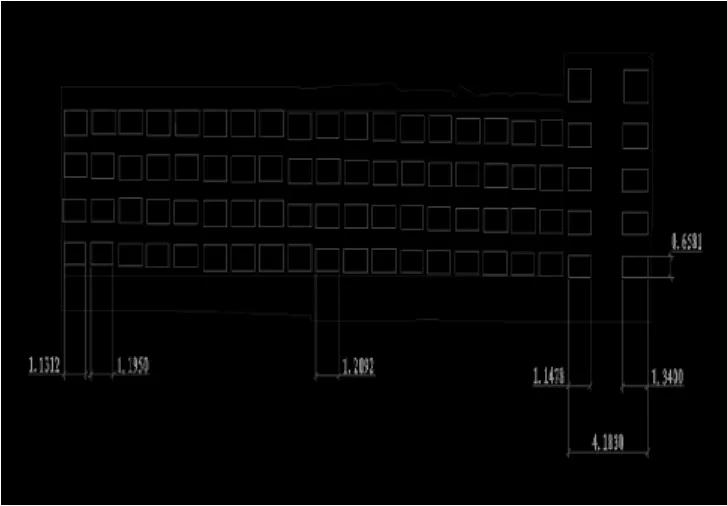
图9 某建筑物立面图
从表2和表3可以看出,利用多基线数字近景摄影测量能够满足建筑物立面图提取的要求。
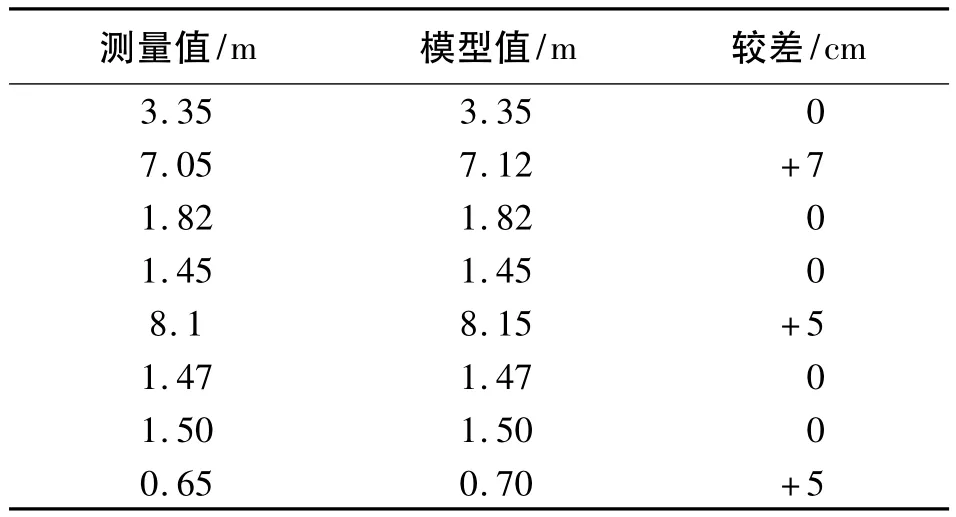
表2 边长检查表
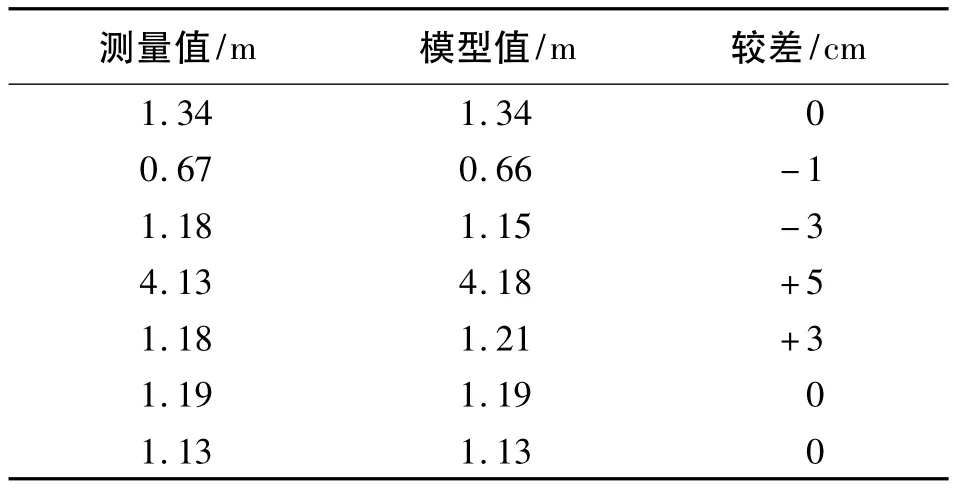
表3 边长检查表
五、结束语
多基线数字近景摄影测量技术为影像自动匹配、交会角和点位解算精度之间的矛盾提供了有效的解决方法。本文通过试验验证了其在建筑物立面图提取中的应用是可行的,且具有能够减少普通测量外业工作量,避免人工攀爬,可提高工作效率等优点。利用多基线数字近景摄影测量在地形测绘、边坡监测、设备安装等领域同样具有广阔的应用前景,这将是需要进一步研究的方向。
[1] 张祖勋,杨生春,张剑清,等.多基线-数字近景摄影测量[J].地理空间信息,2007,5(1):1-4.
[2] 张剑清,胡安文.多基线摄影测量前方交会方法及精度分析[J].武汉大学学报:信息科学版,2007,32(10):848-851.
[3] 柯涛,张祖勋.旋转多基线数字近景摄影测量[J].武汉大学学报:信息科学版,2009,34(1):44-51.
[4] 王之卓.摄影测量原理[M].武汉:武汉大学出版社,2007.
Multi-baseline Digital Close Range Photogrammetry in the Extraction of Building Facades
DING Jinxuan,WANG Bin
0494-0911(2012)06-0047-04
P236
B
2012-04-18
丁进选(1967—),男,湖南常德人,高级工程师,主要从事测绘生产与技术管理工作。
猜你喜欢
科学(2022年4期)2022-10-25
青年文学家(2021年1期)2021-03-24
科学(2020年5期)2020-11-26
中国惯性技术学报(2019年3期)2019-10-15
工程与建设(2019年2期)2019-09-02
当代水产(2019年1期)2019-05-16
舰船电子对抗(2016年5期)2016-12-13
太空探索(2016年9期)2016-07-12
创业家(2015年1期)2015-02-27
航天器工程(2014年5期)2014-03-11
