
基于高程约束的真正射影像遮蔽检测算法
2012-11-14 10:52任东风路海洋
测绘通报 2012年6期
任东风,许 彪,路海洋
(1.辽宁工程技术大学测绘与地理科学学院,辽宁阜新123000;2.武汉大学遥感信息工程学院,湖北武汉430079;3.辽宁地质工程职业学院资源系,辽宁丹东118008)
基于高程约束的真正射影像遮蔽检测算法
任东风1,许 彪2,路海洋3
(1.辽宁工程技术大学测绘与地理科学学院,辽宁阜新123000;2.武汉大学遥感信息工程学院,湖北武汉430079;3.辽宁地质工程职业学院资源系,辽宁丹东118008)
提出一种优化的真正射影像遮蔽检测算法。该方法借鉴角度判别法和高程射线追踪法的思想,在遮蔽检测过程中对判别准则进行约束,从而提高执行效率,并且试验结果证明该方法是可行的。
真正射影像;遮蔽检测;角度判别;射线追踪;约束
一、引 言
正射影像同时具有地图的几何精度和影像视觉特征,用户可以利用它直接进行长度量测、距离量测等,正射影像已成为GIS数据库中重要的组成部分[1-2]。但对于城市地区大比例尺的航空影像来说,由于相机倾斜及高层建筑物的原因致使其存在严重的遮蔽现象,并且这种遮蔽无法利用传统的数字微分纠正技术[3]进行消除,不仅如此,微分纠正会在遮蔽区域产生大量的二次影像。产生的原因是中心投影射线被较高地物遮挡,影像中无对应的纹理信息,微分纠正中逆投影射线会导致较高地物对应的纹理出现二次。这些二次影像严重影响了正射影像的视觉效果及精度,究其原因在于传统方法无法对遮蔽区域进行识别。因此,在进行城市大比例尺正射影像制作时应该对遮蔽区域进行检测,对可见区域直接利用微分纠正技术进行纹理内插并赋值,对遮蔽区域可利用不同视角的相邻影像对其进行灰度补充[4],以此制作无遮蔽的真正射影像。
本文提出一种基于高程约束的真正射影像遮蔽检测算法,该方法借鉴角度判别法[2]和高程射线追踪法[5]各自在遮蔽检测判断准则及搜索路径选择上的优点,采用从里向外螺旋扫描的方式,以内层点的检测结果为依据对外层点的可见性进行约束,快速对地物的可见性进行分析,尤其是当检测区域位于影像边缘时更能体现此种方法的优越性。本文首先对现有的一些遮蔽检测方法及其优缺点进行分析;然后重点说明基于高程约束的遮蔽检测算法的基本思想及其处理流程;最后以4张航空影像作为试验数据,分别利用角度判别法、高程射线追踪法及本文提出的方法进行遮蔽检测处理,并对处理结果和执行效率进行对比分析。试验结果表明,本文提出的算法有效地解决了真正射影像生成中遮蔽检测问题,并且具有很高的执行效率。
二、遮蔽检测
遮蔽检测是制作真正射影像中关键的一步,有效的遮蔽检测是制作真正射影像的前提。目前,遮蔽检测方法包括基于计算机图形学、计算机视觉技术的 Z-Buffer方法[1,6-7]、Hibab的角度判别法[2]、Ki-InBang的高程射线追踪法[5]等。
1.Z-Buffer方法
Z-Buffer方法可以认为是间接法数字微分纠正的一种改进算法,该法计算简单、执行效率高。它基于这样的事实:同一条摄影光线上靠近摄影中心的地物遮蔽较远的地物。在微分纠正过程中,同时记录地面点到摄影中心的距离Z。当多于一个地面点投影到同一像素时,通过比较Z值的大小来判断地面点的可见性。Z值较大的点认为不可见,Z值较小的点认为可见。Z-Buffer方法对DSM分辨率敏感,要求DSM分辨率与影像分辨率相同,否则会出现伪遮蔽及伪可见问题。究其本质在于Z-Buffer方法要求满足这样一个假设:一个DSM格网单元投影后恰好对应一个像素,且仅对应一个像素。未考虑一个DSM格网投影范围超过一个像素和多个DSM格网投影范围对应一个像素的情况,而对于地形起伏大的区域来说,DSM投影后不可避免地会出现几何变形,很难满足一对一的条件。
2.角度判别法
角度判别法[2]由Ayman F.Habib提出。该方法的主要思想是:以地底点和待检测点的连线为搜索路径,通过连续比较摄影光线与地底点方向的角度来进行地物可见性分析。当投影射线逐渐远离地底点时,其偏移角α会随着投影点到地底点的距离d的增大而增大;当到达遮蔽区域时,由于高程急剧的变化,偏移角α会减小,遮蔽区域会持续到α角大于搜索路径上最后一个可见点的α角为止。该方法检测精度高,有效地解决了Z-Buffer方法的不足之处,但其也有缺点,即频繁地计算角度会降低执行效率。
3.高程射线追踪法
高程射线追踪法[5]由Ki-In Bang提出。它是基于这样一个事实:对于某一个地面点来说,如果能够从影像上获取其信息,那就说明在搜索路径上所有点的高度都小于摄影光线的高度。其中摄影光线是指从摄影中心到地面点的连线,搜索路径为摄影光线在正射平面上的投影。通过比较搜索路径上地面点的高度与摄影光线的高度来检测点的可见性,其中摄影光线的高度可通过Z0和dZ来计算,Z0是待检测点的地面高度,dZ是根据摄影光线的斜率和在搜索路径上指定的搜索间隔来计算的。如果在搜索路径上某一点的高度大于摄影光线的高度,则认为待检测的点不可见,如图1所示,点2的高程Z2大于摄影光线高度,则待检测点0不可见。搜索过程中,如果有以下两种情况之一可停止搜索:①摄影光线的高度大于DSM上最高点的高度;②沿着搜索路径上点的平面位置已到达或通过了地底点。
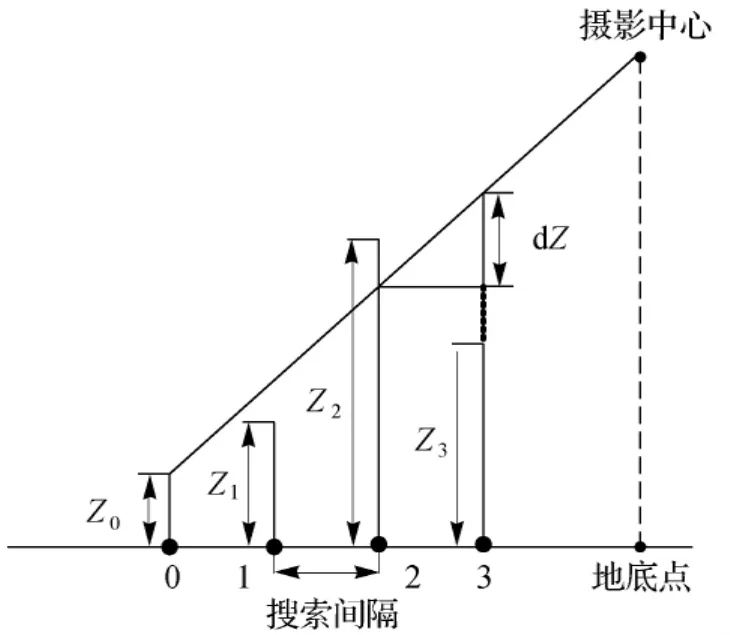
图1 高程射线追踪法
三、高程约束的射线追踪法
如前文所述,角度判别法是通过连续比较摄影方向与地底点方向的角度进行地物可见性分析的,频繁地计算角度会导致执行效率的下降。而高程射线追踪法中对于每一个待检测的地面点都要在搜索路径上进行搜索,直到满足停止条件为止,并未考虑地面点之间的内在联系,对于远离摄影中心的影像边缘来说,其执行效率的降低是必然的。
高程约束法综合考虑了搜索路径的选择及可见性的判断准则,其遮蔽检测原理与角度判别法及高程射线追踪法大致相同,它有效地解决了角度判别法中频繁计算角度及高程射线追踪法中冗余计算导致的执行效率低下的缺点。该方法在搜索策略上借鉴了螺旋扫描角度判别法[2],即以地底点为起始点,以摄影光线在正射平面上的投影为搜索方向,如图2所示。首先假定摄影中心附近的4个格网点可见,起始检测点为黑色五边形标记的地面单元,然后按照顺时针的顺序依次从里向外进行格网可见性的检测。

图2 搜索策略
检测某一个地面点A的可见性时,首先对搜索路径上前一点B的可见性做判断,有两种情况:B可见和B不可见。其次比较A点的射线高度r与B点高程h的关系,如果r>h并且B点可见,则A点可见;如果r<h并且B点不可见,则A点不可见,如图3、图4所示;否则继续沿着搜索路径进行判断,直到满足射线光线高度大于DSM高程最大值为止。此时不需要再像高程射线追踪法那样判断搜索路径上点的平面位置是否到达或者通过了地底点,因为此时是按自内向外的搜索路径。外层点的可见性判断利用了内层点判断的结果,尤其是当待检测点位于影像边缘时,更能体现此种判断准则的优越性。
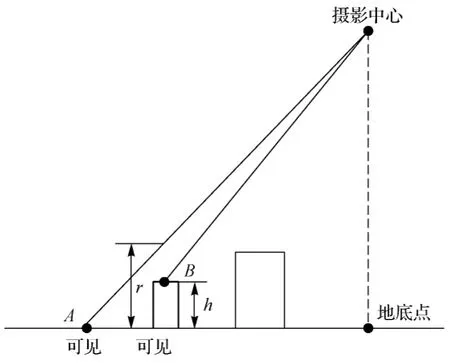
图3 判别准则1
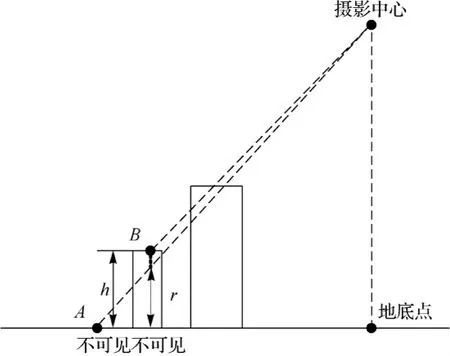
图4 判别准则2
利用上述搜索策略判断搜索区域为矩形,如图2中,当搜索到达“扫描结束行”所对应行时,便不能再继续扫描。此时有可能在3个方向上出现未检测的格网点,如图2中所标记的上侧、下侧及右侧剩余区域,可以先对与螺旋扫描区域相同列数的上侧及下侧剩余区域进行扫描,再扫描剩余的右侧区域。注意此时对于每一个剩余区域而言都是自里向外进行扫描,只有这样才能利用之前已判断其可见性的内层点。
遮蔽检测过程中需要同时记录一个与DSM同维数的索引矩阵,利用该矩阵对遮蔽点进行标记,对于未遮蔽的点直接利用数字微分纠正技术进行灰度内插并赋值,遮蔽的点不作处理直接用黑色填充。利用上述方法生成所有影像的单张正射影像,再通过相邻影像像素补偿的方式对遮蔽区域进行填充。待补偿的正射影像称为主影像,其他用于补偿灰度的影像称为从影像[4]。当主影像上缺失的像素可在多张从影像中获取时,需要一个判别准则判断选取哪一张影像进行填充,判别的准则是依据像素点与各自摄影中心的距离。通常情况下,与摄影中心越近,地物的高差移位越小,选取与摄影中心最近的像素作为补偿源进行灰度填充[8]。另外,由于拍摄角度不同,同一地面区域在不同的影像上色彩可能会有差异,影响了真正射影像的视觉效果。本文首先利用基于自适应模板的匀光[9]和基于全局Wallis变换的颜色匹配[9]方法对原始影像进行颜色处理,使影像整体上颜色一致,灰度补偿时通过对补偿区域与主影像上的临近区域进行羽化处理来进一步改善影像的视觉效果。
四、试验结果
试验数据利用Leica ALS50-Ⅱ激光扫描系统及RCD105相机获取。试验区域扫描飞行高560 m,地面均高60 m,LiDAR地面点间隔0.4 m,相机焦距35.850 1 mm,像素大小0.006 8 mm,影像地面分辨率0.1 m,影像宽、高分别为5389像素和7162像素。LiDAR点云经过滤波等处理后生成0.4间隔的DSM,真正射影像分辨率与原始影像分辨率相同均为0.1 m,如图5所示。
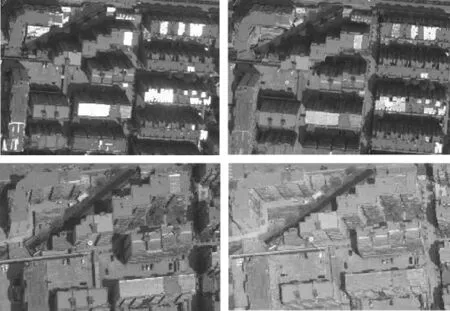
图5 试验区域
本文利用两个航带的4张影像进行试验,图5为具有代表性的区域。从图5中可以看到,由于高层建筑的存在,遮蔽现象很明显,同时,不同视角的影像有不同的遮蔽区域。
由于Z-Buffer方法在遮蔽检测中有很多不足之处,因此本文不利用该方法进行处理,而是利用遮蔽检测效果较好的角度判别法、高程射线追踪法及本文提出的约束的射线追踪法进行处理,为了比较传统正射影像与真正射影像的差别,传统的正射纠正方法也被采用,如图6所示,图7~图9为遮蔽检测结果图。
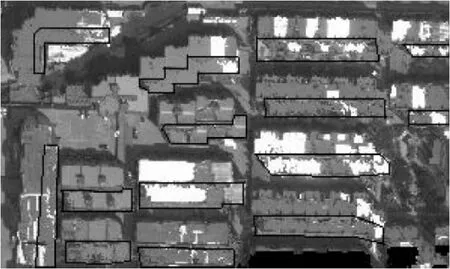
图6 传统正射纠正方法
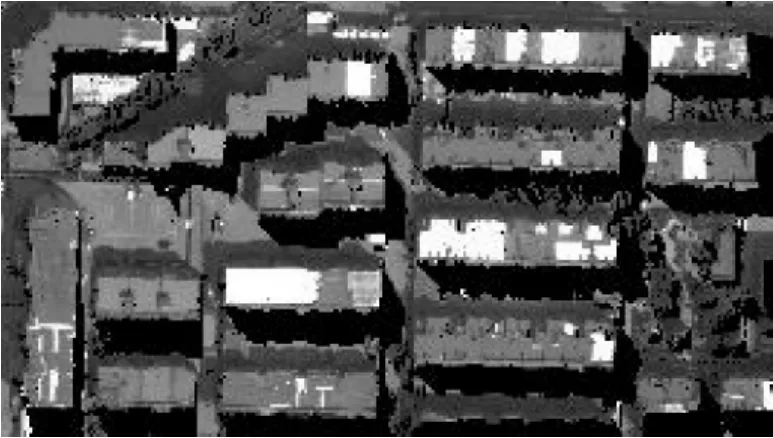
图7 角度判别法
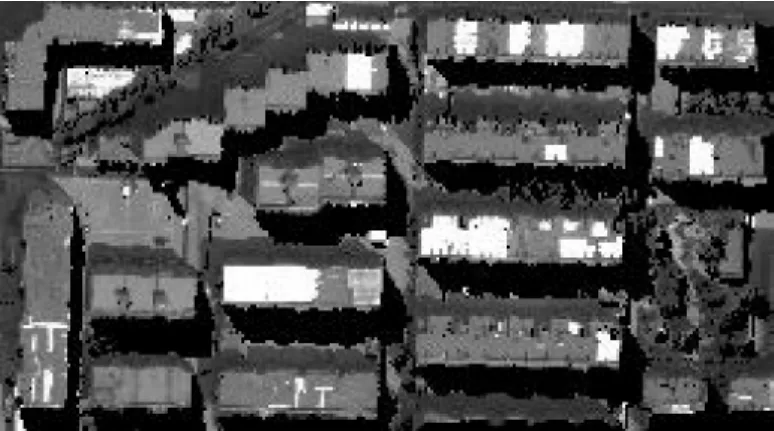
图8 高程射线追踪法
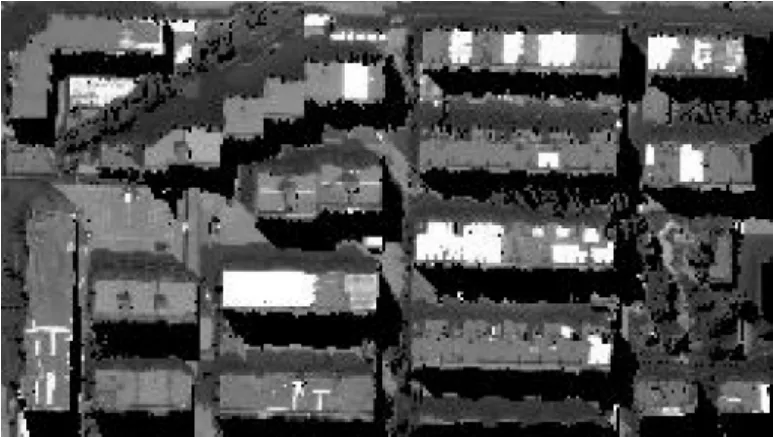
图9 本文方法
传统正射纠正方法未考虑任何的遮蔽问题,图6中存在大量的二次影像(黑色线圈定的区域),这些二次影像的出现不仅破坏了正射影像的视觉效果,还严重影响其精度。图7~图9中的方法有效地对遮蔽进行了检测,遮蔽区域以黑色表示,从中可以看出,3种遮蔽检测的效果几乎相同,但是,由于每种方法的搜索策略及判别准则不同,因此在执行效率上有很大的差别。图10为对上述3种算法执行效率的对比,3种方法执行时间分别为336 s、906 s和186 s,利用约束的射线追踪法较角度判别法、高程射线追踪在执行效率上分别提高了0.8倍和3.82倍。
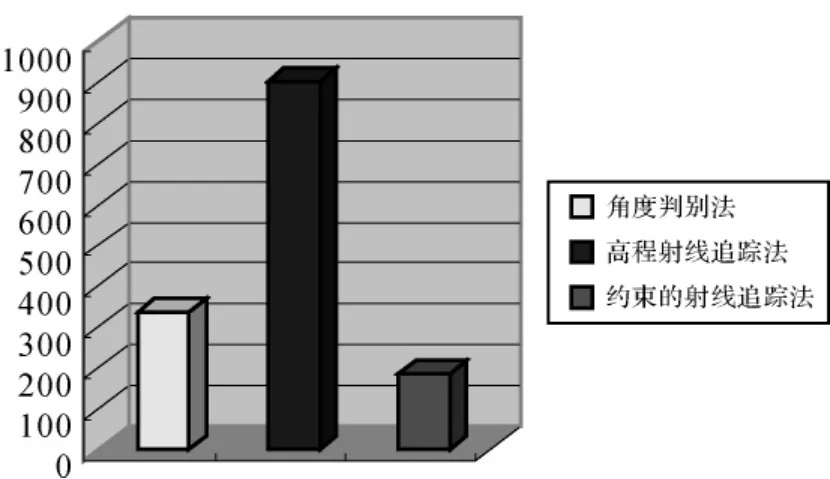
图10 执行时间对比
图11是利用相邻影像进行灰度补偿获取的真正射影像。对比图6可以看到,二次影像的数量得到最大限度的改善,另外,受限于DSM的精度,部分房子的边缘有些模糊。

图11 真正射影像
五、结束语
本文综合考虑已有遮蔽检测方法的优缺点并提出了约束的射线追踪算法,该方法处理效果与角度判别法及高程射线追踪法一致,而执行效率较上述两种高性能的遮蔽检测算法有了大幅度的提高,通过试验结果及对执行时间的对比分析证明了本文方法的可行性。
[1] AMHAR F.The Generation of True Orthophotos Using a 3D Building Model in Conjunction with a Conventional DTM[J].International Archives of Photogrammetry and Remote Sensing,1998,32:16-22.
[2] AYMAN F.New Methodologies for True Orthophoto Generation[J].Photogrammetric Engineering and Remote Sensing,2007,73(1):25-36.
[3] 张剑请,潘励,王树根.摄影测量学[M].武汉:武汉大学出版社,2003.
[4] 边馥苓,王潇.真正射影像生成中遮蔽区域的补偿[J].测绘科学,2009,34(3):81-83.
[5] BANG K.Comprehensive Analysis of Alternative Methodologies for True Orthophoto Generation from High Resolutions Satellite and Aerial Imagery[C]∥ASPRS 2007 Annual Conference.Tampa:[s.n.],2007.
[6] RAU J.Hidden Compensation and Shadow Enhancement for True Orthophoto Generation[C]∥Proceedings of Asian Conference on Remote Sensing.[S.l.]:ACRS,2000.
[7] RAU J.True Orthophoto Generation of Built-up Areas U-sing Multi-view Images[J].Photogrammetric Engineering and Remote Sensing,2002,68(6):581-588.
[8] SCHICHLER W.Operational Procedure for Automatic True Orthophoto Generation[J].International Archives of Photogrammetry and Remote Sensing,1998,32: 527-532.
[9] 李治江.彩色影像色调重建的理论与实践[D].武汉:武汉大学,2005.
True Orthophoto Occlusion Detection Based on Elevation Constraint
REN Dongfeng,XU Biao,LU Haiyang
0494-0911(2012)06-0039-04
P23
B
2011-11-10
任东风(1978—),男,辽宁阜新人,博士生,主要研究方向为数字摄影测量和GIS开发。
猜你喜欢
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
当代陕西(2020年23期)2021-01-07
中学生数理化·七年级数学人教版(2019年12期)2019-05-21
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
中成药(2017年3期)2017-05-17
中国塑料(2016年9期)2016-06-13
安徽地质(2016年4期)2016-02-27
遥感信息(2015年3期)2015-12-13
电测与仪表(2015年22期)2015-04-09
全球定位系统(2015年4期)2015-02-28
