多操纵面飞行器控制分配技术的发展及应用
2012-11-06 03:49:23陈勇董新民薛建平王小平刘勤
飞行力学 2012年4期
陈勇, 董新民, 薛建平, 王小平, 刘勤
(空军工程大学 工程学院, 陕西 西安 710038)
多操纵面飞行器控制分配技术的发展及应用
陈勇, 董新民, 薛建平, 王小平, 刘勤
(空军工程大学 工程学院, 陕西 西安 710038)
控制分配是先进多操纵面飞行器控制理论及应用的一项关键技术。首先介绍了多操纵面布局的典型操纵面,然后从静态、动态和非线性三个方面分别论述了控制分配技术的最新研究成果,概述了航空航天领域及其他工业领域的应用情况。最后总结了控制分配的几个关键问题,讨论了今后可能的研究方向。
飞行控制系统; 多操纵面布局; 控制分配; 级联控制结构
引言
随着对飞机机动性、安全性和可靠性要求的不断提高,现代先进的气动布局常采用过驱动配置。通过各轴向设计冗余的执行机构,为飞行控制律提供多种组合方式,极大地提高了飞机故障条件下的重构能力和战场条件下的生存能力。但操纵面的增多使控制耦合度增强,执行器的非线性动态特性更为明显,如何实现指令的有效分配已经成为多操纵面飞行控制系统设计中必须首先解决的问题。
近年来,控制分配作为向冗余执行器分配控制律指令的关键技术,已受到国内外专家的广泛关注[1]。控制分配器有两个突出优点[2]:能够考虑执行器物理约束生成控制指令;操纵面故障时无需重新设计飞行控制律即可实现控制重构。
目前,控制分配技术除了在先进战斗机、客机、导弹、飞碟、飞艇、再入飞行器等航空航天领域成功应用外,还在舰船、机动车、发动机等工业领域也得到了快速发展。本文在分析典型多操纵面布局的基础上,构造了带控制分配器的级联飞行控制结构,从理论研究和工程应用两个方面论述了控制分配技术的最新成果,指出了存在的问题和潜在的研究方向。
1 多操纵面布局及分类
随着气动布局的不断发展,多操纵面飞行器除了配置方向舵、副翼、平尾等常规舵面外,还引入多种创新型广义气动操纵面,如升降副翼、全动翼梢、嵌入式舵面、前缘襟翼、翼梢小翼、开裂式方向舵、后缘襟副翼、扰流板、推力矢量等。国外典型先进飞行器的操纵面配置如图1所示。

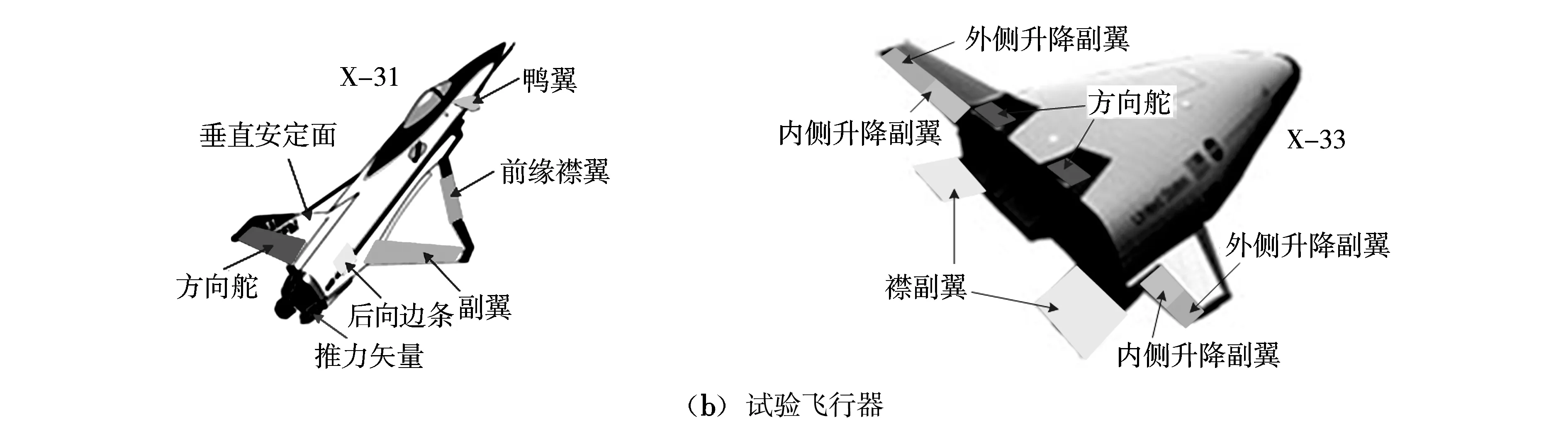
图1 国外典型飞行器的操纵面配置
研究表明[3],创新型操纵面的气动控制效率较常规舵面高,可提供足够的各向控制力矩,但存在操纵面偏转造成不利耦合力矩的问题。因此,消除或避免不利耦合力矩,开展综合控制研究是开发使用新型高效气动操纵面的关键。
2 多操纵面控制结构框架
图2所示为带控制分配器的多操纵面飞控系统级联控制结构[2]。飞行控制律模块基于虚拟指令设计,控制分配器则通过控制效能映射函数将虚拟指令进行合理分配,经执行机构实现对飞机的控制。
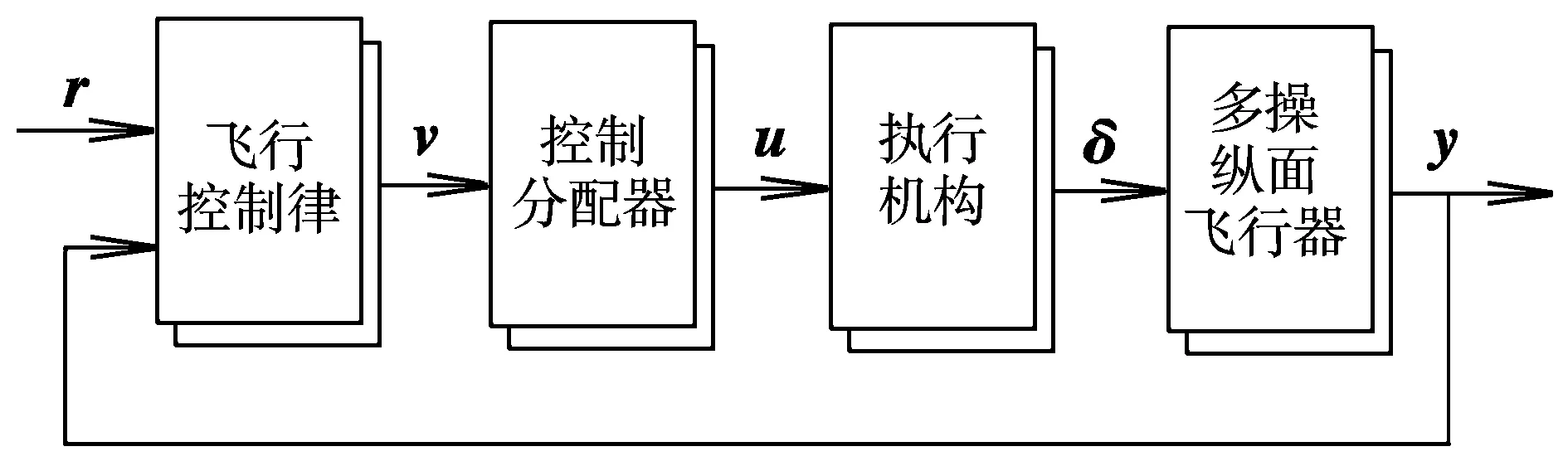
图2 多操纵面飞控系统级联控制结构
考虑多操纵面飞行器的仿射非线性模型为:
(1)
式中,x(t)∈Rn为系统的状态;u(t),δ(t)∈Rm分别为执行器指令的期望值和实际值,通常δ(t)≠u(t);f(·)和fδ(·)分别为飞机和执行器的非线性动态特性;gδ(·)为控制输入函数。在级联控制结构中,通常引入飞机的控制力矩或偏转角加速度作为虚拟控制v∈Rk,直接控制飞机三轴方向的运动,满足:
v(t)=gu(x,u)u(t)
(2)
gv(x,v)v(t)=gδ(x,δ)δ(t)
(3)
式中,gv(·)为虚拟输入函数;gu(·)为v(t)与u(t)之间的映射函数。
控制分配问题就是按照预定的优化目标将期望控制v(t)最优地分配到冗余受限执行器u(t)上[4]。对v(t)线性化可将线性控制分配问题描述为:
v(t)=Bu(t),u(t)∈Ω
(4)
式中,B∈Rk×m为行满秩控制效率矩阵;Ω为执行器位置约束和速率约束构成的凸集:
Ω={δ(t)|δmin≤δ(t)≤δmax,
(5)

(6)
3 控制分配技术的理论研究现状
控制分配技术经历了从静态到动态、从单目标到多目标、从线性到非线性的发展过程,已经延伸出多种分配策略。
3.1 静态控制分配方法
静态控制分配主要包括直接分配、广义逆分配、串接链分配等经典方法。
3.1.1直接分配法
直接分配是1992年佛吉尼亚理工大学W C Durham教授基于转矩可达集提出来的[5],存在计算量大的问题。为改进直接分配算法的解算速度,相继提出了次优分配法和对边搜索法,但仍可能得不到最优解。文献[6]提出了具有共面控制的球面快速搜索算法。文献[7]通过矩阵空间转换构造了直接分配的线性规划形式,保证最优的同时避免了高维控制量的空间计算。李卫琪等[8]通过步进式搜索可达集空间的所有表面提出了相邻面搜索算法。
直接分配法的优点在于几何意义直观、虚拟指令不变向、能完全实现可达集指令,缺点是实时性难以保证。
3.1.2广义逆分配法
广义逆分配主要包括伪逆、加权伪逆、再分配伪逆、级联广义逆、自适应广义逆等方法。
伪逆法是早期发展的一种以偏转量最小为优化目标的控制分配方法。通过F-18仿真表明[9],伪逆法能获取可达集中13.7%的虚拟指令,即使最优的伪逆映射函数也仅能实现可达集的42.7%。
按照不同的使用侧重点,可对各控制面分别赋权值,形成了加权伪逆法。对于控制效能较高的操纵面,可分阶段选择不同的权值系数以降低过早进入饱和状态的概率,于是出现了变权值自适应广义逆[10]。文献[11]考虑操纵面位置和速率约束,基于LMI分别提出了线性变权值和非线性变权值控制分配方案。为了改善分配效率,出现了再分配伪逆方案。
3.1.3串接链分配法
串接链采用层级思想,利用下一级控制机构产生前一级因饱和未实现的控制指令,如图3所示。
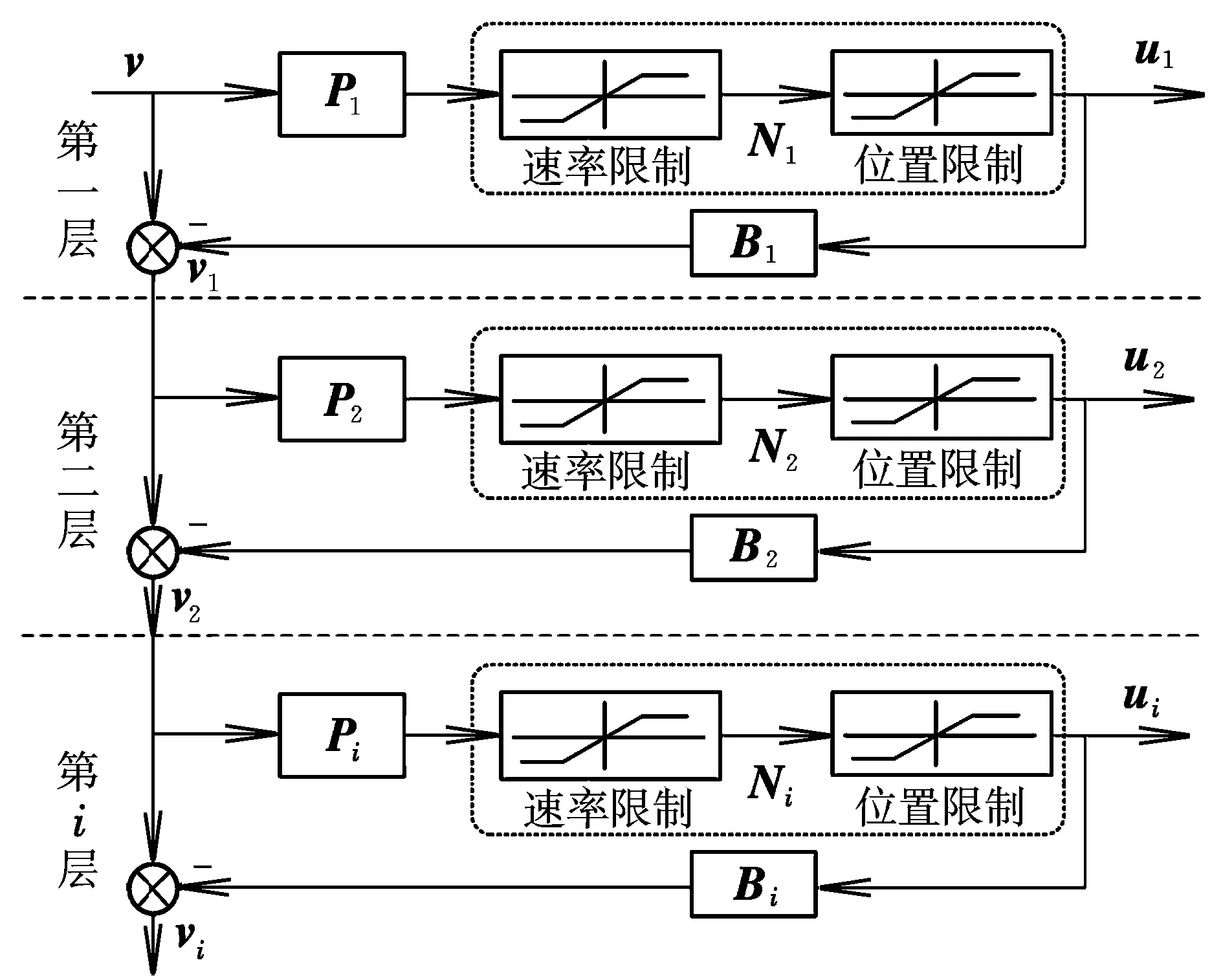
图3 串接链控制分配方法流程图
图3中,Bi为第i组操纵面控制效率矩阵,满足BiPi=I。但使得BiNiPi≠I,可能导致闭环回路性能恶化,引起操纵面振荡。在对串接链的研究中,文献[12]分析了作动器速率限制对串接链分配的影响。文献[13]根据Lyapunov定理给出了闭环系统零动态渐近稳定的充分条件。张曙光等[14]结合动态逆研究了推力矢量飞机超机动飞行操纵指令的协调分配问题,验证了串接链的有效性。
串接链方法工程易实现、分配方式灵活,在先进推力矢量战斗机中具有重要的应用价值。
3.2 动态控制分配法
静态控制分配方法以忽略执行器动态为前提,即执行器频带宽度远高于刚体飞机频带宽度。实际上操纵面具有不同的动态特性,操纵效率与理想情况也不尽相同,忽略控制分配和执行器的动态铰链将对控制系统性能产生严重的影响[15]。研究表明[16],考虑执行器动态过程可有效提高控制分配的精度,从而提升整个控制系统的性能。
3.2.1频率加权法
针对操纵面动态性能差异,文献[17]将操纵面的频域性能引入优化目标,提出了一种稳定的混合优化动态控制分配器设计方法,采用合理的控制加权,利用鸭翼的动态特性抵消了座舱过载,减小了配平阻力。文献[18]采用方向保持法对特定控制量进行频率加权,提出了二次规划优化动态控制分配方法。
3.2.2动态补偿法
在执行器动态响应过程不可忽略的情况下,受执行器速率约束的限制,控制指令常低于且滞后于控制分配器产生的指令。为补偿执行器动态特性造成的控制指令衰减和滞后。文献[15]研究了三种典型执行器动态模型的控制指令补偿问题。文献[16]基于LMI求解最优动态补偿策略,表明补偿后的控制分配策略能够抑制导弹控制系统的闭环不稳定。文献[19]则利用所有执行器的冗余控制效能共同补偿舵机的动态影响。
3.2.3动态预测法
模型预测作为处理控制约束和状态约束的有效方法,能够直接考虑执行器动态特性建立稳定的控制分配律。文献[20]研究了再入飞行器的模型预测动态控制分配问题,将执行器理想化为一阶线性动态模型,通过预测控制求解包含执行器动态的控制分配指令。文献[21]分析了模型预测动态控制分配系统的稳定性问题,缺点是对执行机构动力学模型依赖程度较高[1]。文献[22]提出了一种子空间预测控制分配方法,实现了B747飞机多组关键操纵面故障时的容错控制。马建军等[1]针对动态控制分配的不确定性建模,结合子空间预测控制理论实现了ADMIRE无人机的鲁棒动态控制分配。
3.3 非线性控制分配法
大多数工业控制系统都是控制量耦合的非线性系统,且执行器本身存在非线性动态,直接针对真实系统进行控制分配,具有重要的研究价值。
3.3.1分段线性规划法
分段线性规划方法假设执行器位置与生成的虚拟控制量之间具有分段线性关系。文献[23]对操纵面控制效率曲线分段线性化,从而将非线性控制分配问题转化为整数线性规划。文献[24]通过利用仿射函数逼近操纵面的非线性控制效能,实现了非线性控制分配。王鹏等[25]运用分段线性函数处理飞翼布局的非线性控制分配问题,提高了控制响应精度。
3.3.2非线性规划法
非线性规划方法中最常见的有二次规划和多目标规划。文献[26]针对结构奇异导致非线性控制分配非凸的问题,将消除奇异引入优化控制目标提出一种序列二次规划分配方法。文献[27]利用高阶多项式拟合气动数据,提出了一种非线性规划控制分配方案。文献[28]综合权衡多个控制目标提出了一种非线性规划控制分配方案,给出了多目标非线性控制分配解的评价指标及方法,实现了不同飞行任务的多种目标优化。
3.3.3非线性自适应法
非线性自适应方法根据渐近最优和准最优控制条件,将优化问题转化为最优集的收敛问题,设计稳定且最优的非线性控制分配律。文献[29]根据拉格朗日定理设计了非线性最优控制分配方案,并进一步研究了包含执行器动态的自适应控制分配问题[30],可推广至操纵面故障或损伤时的自动控制重构。文献[31]提出了一种有限时间收敛的非线性控制分配方案,结合模型参考动态逆控制律证明了闭环控制系统的稳定性。
4 控制分配技术的工程应用现状
4.1 航空航天领域
化学示踪剂以无机盐类、荧光染料类、卤代烃类为主,主要用于研究储层物性、油层连通性和注水对地层的影响。由于化学示踪剂存在相对用量大、需要井口作业、成本高和环境污染等问题,所以该类示踪剂呈淘汰趋势。
控制分配技术在航空航天领域的应用涉及飞机、导弹、飞碟、再入飞行器、卫星、飞艇等。
在飞机控制方面的研究成果最多。2003年,NASA和美国空军在B747和C-17上研究了运输类飞机关于损伤自适应性的控制再分配策略,改善了飞行品质。Wright实验室进行了F-16推力矢量飞机的全包线非线性仿真,验证了伪逆法的有效性。文献[32]在新型控制面技术验证机LMICE上运用伪逆分配验证了飞行控制系统的有效性。文献[33]将控制分配技术用于无尾飞机纵向控制系统中。
在导弹控制方面也有少量应用案例。文献[34]分别通过伪逆法和串接链来协调导弹的推力矢量和传统控制面的偏转。文献[35]研究了带尾翼和燃气舵的导弹动态控制分配问题,验证了约束和无约束控制分配方法均可实现导弹的最优控制。
航天方面,文献[36]采用整数规划来综合分配气动操纵面和反作用控制系统,并运用Lyapunov理论证明了高度控制系统的稳定性。文献[37]研究了下一代再入飞行器的控制分配问题。文献[38]将控制分配技术应用于飞艇的纵向和侧向控制中。
4.2 其他工程领域
控制分配技术在航空航天领域的成功应用,引导其在舰船、机动车等工程领域得到了快速发展。
在机动车控制方面,控制分配技术根据横摆角速度、侧偏角与参考值的误差,考虑执行器约束和机轮工作状态将控制力矩分配到机动车各车轮。文献[41]运用非线性自适应控制分配策略实现了电动车的稳定控制。文献[42]基于加权伪逆和滑模控制实现了汽车的动态协调控制,提出了一种自适应加速收敛的定点控制分配方法。
5 存在问题和研究方向
尽管多操纵面控制分配技术在理论研究和工程应用方面已取得了诸多成果,但仍然存在许多待完善的地方,需要在发展多操纵面飞行器的过程中展开进一步的深入研究,主要包括:
(1)现代先进飞行器普遍包含多个操纵面,尤其是大型军用运输机和民用客机,操纵面甚至在30副以上。由于各种操纵面具有不同的物理属性,对飞机三轴将产生不同的控制效能,不合理的控制赋权容易出现操纵面间效能抵消的现象,导致控制分配对可达集空间分配效率降低,直接影响控制性能。如何考虑执行器物理特性以确定控制权值是提高控制分配效能的重要研究方向。
(2)关于包含执行器动态特性的控制分配方法,目前国内外公开发表的文献不多,绝大部分都是集中研究典型执行器精确模型的动态补偿问题。实际上执行机构作为影响飞行控制系统可靠性和安全性的关键部件之一,大量参数存在非线性和不确定性,常规方法难以建立其精确的数学模型。当执行器出现损伤等意外故障时,模型的动态不确定性将更为突出。考虑不确定执行器物理特性设计动态控制分配器是当前重要研究方向之一,越来越得到研究人员的高度重视。
(3)与常规飞机不同的是,多操纵面飞机包含多组性能参数各异的约束控制面,其控制效能在扩展的飞行包线内随高度、马赫数等时变参数不断变化,直接进行控制器设计必然增加参数调节的难度。针对多操纵面飞行器随状态参数摄动的线性参变数学模型,结合操纵面气动特性设计大包线范围内稳定的飞行控制律具有十分重要的现实意义。
(4)受外界环境和自身参数影响,飞行器模型不可避免地存在未建模动态,基于精确模型设计的飞行控制律和控制分配器将具有一定的保守性。结合鲁棒控制理论设计闭环稳定的级联飞行控制器,以抑制模型摄动的不利影响,是提高飞控系统控制性能的重要手段之一。
(5)随着智能控制技术的发展,启发式优化算法在飞行控制领域已得到了初步应用。如何将遗传算法、蚁群算法、粒子群优化等新兴方法融入到控制分配优化问题中,把智能控制与控制分配结合起来,是未来控制分配研究的另一个热点。
(6)许多控制分配方案都需解决计算量大、设计复杂、闭环不稳定的问题,工程应用有待进一步开拓。需要指出,尽管目前已有若干工程应用成功的例子,但更多的方案仍停留在数值验证阶段。
6 结束语
多操纵面控制分配技术是当前先进飞行控制理论及应用研究方面的前沿课题,是面向冗余控制系统设计的一项重要的关键技术,在航空、航天和其它工业领域具有广泛的应用前景。本文在分析典型多操纵面布局的基础上,概述了近年来控制分配技术的发展现状。当然,控制分配理论和应用的研究尚未成熟,还存在一系列尚待解决的问题,值得未来在发展多操纵面飞行器的过程中做进一步探索。
[1] 马建军,郑志强,胡德文.包含执行器动力学的子空间预测动态控制分配方法[J].自动化学报,2010,36(1):130-138.
[2] 陈勇,董新民,薛建平,等.两类混合优化控制分配算法的灵敏度分析[J].飞行力学,2011,29(2):49-53.
[3] 王元元,张彬乾,沈冬.W型无尾布局复合式气动舵面设计研究[J].西北工业大学学报,2008,26(6):698-702.
[4] 马建军,李文强,李鹏,等.飞行器控制分配技术研究现状与展望[J].飞行力学,2009,27(3):1-5.
[5] Durham W C.Constrained control allocation three moment problem [J].Journal of Guidance,Control,and Dynamics,1994,17(2):330-336.
[6] Petersen J A,Bodson M.Fast implementation of direct allocation with extension to coplanar controls[J].Journal of Guidance,Control,and Dynamics,2002,25(3):464-473.
[7] Bodson M.Evaluation of optimization methods for control allocation[J].Journal of Guidance,Control,and Dynamics,2002,25(4):703-711.
[8] 李卫琪,魏晨,陈宗基.受限控制直接分配新算法[J].北京航空航天大学学报,2005,31(11):1177-1180.
[9] Bordignon K A,Durham W C.Closed-form solutions to constrained control allocation problem[J].Journal of Guidance,Control,and Dynamics,1995,18(5):1000-1007.
[10] 陈勇,董新民,薛建平,等.多操纵面飞控系统约束自适应控制分配策略[J].系统工程与电子技术,2011,33(5):1118-1123.
[12] Berg J,Hammett K,Schwartz C,et al.An analysis of the destabilizing effect of daisy chained rate-limited actuators[J].IEEE Transactions on Control Systems Technology,1996,4(2):171-176.
[13] Buffington J M,Enns D F.Lyapunov stability analysis of daisy chain control allocation[J].Journal of Guidance,Control,and Dynamics,1996,19(6):1226-1230.
[14] 张曙光,高浩.推力矢量飞机操纵指令的协调分配[J].西北工业大学学报,1996,14(3):361-365.
[15] Oppenheimer M,Doman D.A method for compensation of interactions between second-order actuators and control allocators[C]//2005 IEEE Aerospace Conference.Malta,2005:1-8.
[16] Kishore W C,Sen S,Ray G.Dynamic control allocation for tracking time-varying control demand[J].Journal of Guidance,Control,and Dynamics,2008,31(4):1150-1157.
[17] Härkegård O.Dynamic control allocation using constrained quadratic programming [J].Journal of Guidance,Control,and Dynamics,2004,27(6):1028-1034.
[18] Simmons A T,Hodel A S.Control allocation for the X-33 using existing and novel quadratic programming techniques[C]//Proceedings of the 2004 American Control Conference.Boston,2004:1701-1706.
[19] 陈勇,董新民,薛建平,等.舵机动态系统耦合补偿控制分配策略[J].仪器仪表学报,2010,31(7):1495-1500.
[20] Yu Luo,Doman D.Model predictive dynamic control allocation with actuator dynamics[C]//Proceedings of the 2004 American Control Conference.Boston,2004:1695-1700.
[21] Vermillion C,Jing S,Butts K.Model predictive control allocation for overactuated systems stability and performance[C]//IEEE Conference on Decision and Control.New Orleans,2007:1251-1256.
[22] Hallouzi R,Verhaegen M.Reconfigurable fault tolerant control of a Boeing 747 using subspace predictive control[C]//Guidance,Navigation and Control Conference and Exhibit.Carolina,2007:1-18.
[23] Bolender M,Doman D.Non-linear control allocation using piecewise linear function[J].Journal of Guidance,Control,and Dynamics,2004,27(6):1017-1027.
[24] Doman D,Oppenheimer M. Improving control allocation accuracy for nonlinear aircraft dynamics[R].AIAA-2002-4667,2002.
[25] 王鹏,周洲,王睿.基于分段线性的飞翼布局飞机控制分配方法[J].西北工业大学学报,2009,27(3):321-325.
[26] Johansen T,Fossen T,Berge S.Constrained nonlinear control allocation with singularity avoidance using sequential quadratic programming [J].IEEE Transactions on Control Systems Technology,2004,12(1):211-216.
[27] Poonamallee V,Yurkovich S,Serrani A,et al.A nonlinear programming approach for control allocation[C]//Proceedings of the 2004 American Control Conference.Boston,2004:1689-1694.
[28] 杨恩泉,高金源,李卫琪.多目标非线性控制分配方法研究[J].航空学报,2008,29(4):995-1001.
[29] Tjønnås J,Johansen T A.Adaptive optimizing nonlinear control allocation[C]//The 16th IFAC World Congress.Prague,2005:1-6.
[30] Tjønnås J,Johansen T A.Optimizing adaptive control allocation with actuator dynamics[C]//Proceedings of the 46th IEEE Conference on Decision and Control.New Orleans,2007:3780-3785.
[31] Liao F,Lum K Y,Wagn J L,et al.Constrained nonlinear finite-time control allocation[C]//Proceedings of the 2007 American Control Conference.New York,2007:3801-3806.
[32] Raney D L,Montgomery R C.Flight control using distributed shape-change effecter arrays[R].AIAA-2000-1560,2000.
[33] 陈怀民,徐奎,马松辉,等.控制分配技术在无尾飞机纵向控制系统中的应用研究[J].西北工业大学学报,2007,25 (2):199-203.
[34] Lee H,Choi J,Song T,et al.Agile missile autopilot design via time-varying eigenvalue assignment[C]//International Conference on Control,Automation,Robotics and Vision.Kunming,2004:1832-1837.
[35] Ridgely D B,Drake D,Triplett L,et al.Dynamic control allocation of a missile with tails and reaction jets[R].AIAA-2007-6671,2007.
[36] Doman D B,Gamble B J,Ngo A D.Quantized control allocation of reaction control jets and aerodynamic control surfaces[J].Journal of Guidance,Control,and Dynamics,2009,32(1):13-24.
[37] Shertzer R H.Control allocation for the next generation of entry vehicles[R].AIAA-2002-4849,2002.
[38] Battipede M,Gili P A,Lando M.Control allocation system for an innovative remotely-piloted airship[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit.Rhode Island,2004:1-13.
[39] Fossen T I,Johansen T A.A survey of control allocation methods for ships and underwater vehicles[C]//14th IEEE Mediterranean Conference on Control and Automation.Ancona,Italy,2006:1-6.
[40] Lindegaard K,Fossen T.Fuel-efficient rudder and propeller control allocation for marine craft:experiments with a model ship[J].IEEE Transaction on Control Systems Technology,2003,11(6):850-862.
[41] Tjønnås J,Johansen T A.Stabilization of automotive vehicles using active steering and adaptive brake control allocation[J].IEEE Transactions on Control Systems Technology,2010,18(3):545-558.
[42] Junmin Wang,Solis J M,Longoria R G.On the control allocation for coordinated ground vehicle dynamics control systems[C]//Proceeings of the 2007 American Control Conference.New York,2007:5724-5729.
(编辑:方春玲)
Developmentandapplicationofcontrolallocationformulti-effectorvehicle
CHEN Yong, DONG Xin-min, XUE Jian-ping, WANG Xiao-ping, LIU Qin
(Engineering Institute, Air Force Engineering University, Xi’an 710038, China)
Control allocation is one of the key technologies in the control theory and application of the advanced multi-effector vehicle. Firstly, the typical effectors for multi-effector configuration are presented in this overview. Then, the latest research results of control allocation are discussed respectively from three aspects of static, dynamic and nonlinear control allocation., which mainly concentrate on the applications in the aeronautic, astronautic and other industries. Finally, several key issues in control allocation are summarized, and the future potential research directions are discussed.
flight control system; multi-effector configuration; control allocation; cascaded control structure
V249.1
A
1002-0853(2012)04-0289-06
2011-10-08;
2012-02-22
陈勇(1984-),男,四川德阳人,博士研究生,研究方向为控制分配、故障诊断及控制重构。
猜你喜欢
房地产导刊(2022年5期)2022-06-01 06:19:40
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
建材发展导向(2022年6期)2022-04-18 08:17:28
建材发展导向(2021年7期)2021-07-16 07:07:40
测控技术(2018年12期)2018-11-25 09:37:50
电子制作(2018年2期)2018-04-18 07:13:25
制造技术与机床(2017年9期)2017-11-27 02:13:45
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01 04:06:33
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49