基于子空间辨识的汽油机空燃比控制模型的研究
2012-10-29 03:00李顶根刘刚汪荣青
汽车工程学报 2012年2期
李顶根,刘刚,汪荣青
(1.华中科技大学 能源与动力工程学院,湖北,武汉 430074;2.浙江机电职业技术学院,浙江,杭州 310053)
汽油机常采用油膜动态方程设计空燃比补偿器,这种基于气道油膜辨识的空燃比控制方法,在发动机稳态运行时,较为适用,而在发动机瞬态时,辨识误差较大[1]。美国FTP75测试循环[2]表明,发动机80%的排放物均在发动机冷启动过程的瞬态运行工况下产生。可见瞬态工况下的空燃比精确控制(考虑油膜动态效应)是改善发动机缸内空燃比波动,从而降低污染物排放的有效手段。为此,本文拟采用子空间辨识N4SID算法,辨识多影响参数下缸内空燃比动态波动模型,分析多参数对辨识出的空燃比动态模型的影响,分析模型的抗扰性能,为空燃比的控制建模打下基础。
1 汽油机油膜动态方程辨识及空燃比控制建模
汽油机采用进气道喷射方式,燃油从喷油器喷出后,一部分以蒸汽形式存在于气道中,另一部分直接附着在壁面上,形成附壁油膜。油膜的存在对发动机实际燃烧空燃比有很大影响,特别是发动机冷启动时。研究发现,美国联邦FTP75测试循环冷启动过程中所排放出的HC及CO占整个循环排放物的70%~80%,而很大部分原因归结于冷启动过程中空燃比波动过大[2]。
因此,对汽油机进气道油膜动态模型建模分析的研究引起了国内外学者的广泛兴趣。最有效的油膜物理模型建模研究始于1981年Aquino所提出的X-x模型,他将由喷油器喷出的燃油分成以X分数沉积在壁面上的油膜以及以(1-X)分数悬浮在进气道中的燃油蒸汽及微小液珠。附着在壁面上的油膜的蒸发时间常数是x[3]。之后于1992年,Hendricks E.和Vesterholm 提出了双时间常数模型,该模型额外考虑了燃油蒸汽和液珠由进气道进入气缸的输运时间,其在某些工况下的模拟结果较优于X-x模型[4]。之后很多国外学者也对进气道油膜进行过深入的研究,在上述两种模型的基础上,提出了不同的改进模型[2,5-6]。国内有人采用最小二乘法、扩展卡尔曼滤波等方法对油膜X- x模型进行辨识,并在此基础上设计了油膜补偿器,对各种工况下的喷油量进行补偿达到精确控制空燃比的目的[7-9]。
上述传统的辨识方法,均基于油膜物理模型的推导及建立,过程繁杂,不利于考虑发动机多运行参数对缸内空燃比的影响。子空间辨识方法直接从输入输出数据中提取状态空间参数,可以综合考虑多参数对空燃比模型的影响,同时在辨识时间上要较传统辨识方法少,这主要是因为子空间方法没有循环迭代的过程[10]。
2 研究对象及模型简述
试验系统采用某型汽油发动机为研究对象,将实物系统简化,在GT-Power软件中搭建相应的发动机模型。发动机基本参数见表1。
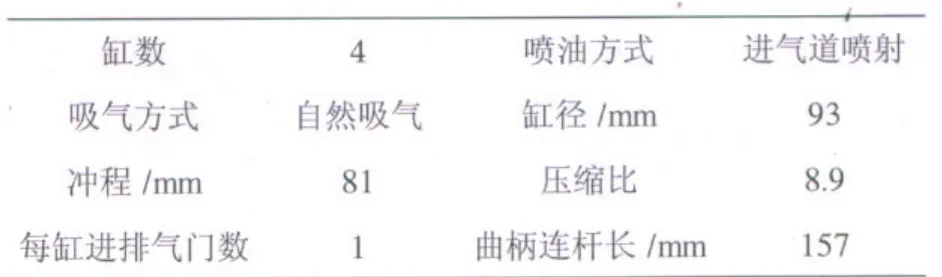
表1 发动机的主要参数
模型主体是GT-Power软件中自带的具有高度保真性的算例模型,本文是在该模型的基础上修改相关参数,并进行研究。
假设汽油机缸内空燃比动态模型的状态空间方程如下:
且做如下假设(即系统噪声与测量噪声不相关):
定义输入数据Hankel矩阵如下:
输出yk的Hankel矩阵Y02i-1定义同上。
3 子空间N4SID算法及所辨识的模型
子空间辨识算法能够根据给定输入输出数据的Hankel矩阵,通过空间正交投影或斜向投影的数学方法,直接估计出系统的状态序列。从而将状态空间的求解问题转化为最小二乘问题,再求解出状态空间矩阵A、B、C、D。它大大简化了系统的建模过程,去除了繁琐的物理模型推导过程。
假设式(1)所描述的系统是可观的,则可设计Kalman滤波器对其状态进行估计。
K为Kalman增益,令
系统方程变为
将yk的表达式代入到状态方程中,可得
可推出
在应用系统输入输出Hankel矩阵进行子空间辨识时,需作如下假设进行限制[11]。
(1)矩阵(A-KC)的特征值严格分布在单位圆内。
(2)系统矩阵(A,C)是可观的,(A,[B,K])是可控的。
(3)误差序列ek是稳定的零均值、白噪声序列,且其二阶矩满足
式中:dij为Kronecker符号。
(4)对于开环数据,输入序列uk与误差序列ek不相关。
(5)输入信号是准稳态,且是持续激励的。
针对上述假设,进行发动机开环试验设计,选择某型汽油发动机在GT-Power软件中建模,试验转速变化范围为1 000~6 000 r/min,每100 r/min进行数据采样;喷油量变化范围为3.5~5.5 g/s;进气温度范围为280~340 K,此三者为模型辨识的输入量。缸内空燃比为输出量。辨识数据分布如图1所示。
应用上述试验数据进行系统辨识,数据样本为1 000组。首先,对式(4)的输出方程进行扩展和迭代,得到新的输出方程为
对式(5)进行迭代,可得Xk的表达式为


由(9)式可知,仅仅应用已知的输入输出Hankel矩阵便可估计系统可观测矩阵C,其估计值为

计算出C矩阵的估计值后,通过下式计算状态矩阵的估计值。
从而式(1)所表示的系统模型辨识问题,转化为一个最小二乘求解问题[10]。
利用计算出的系统矩阵的估计值,可计算系统残差的协方差矩阵,协方差矩阵的求解仍然转化为最小二乘的求解问题[10]。
根据上述算法,编写Matlab计算程序,程序计算出的系统阶数图如图2所示。
图2中纵坐标为系统奇异值的log函数值分布,横坐标为程序所设定的阶数范围。由图2可知,当系统阶数n大于3后,其所对应的奇异值的log函数值越来越小,故程序计算出3为系统的最佳阶数。
确定模型阶数后,即可利用发动机开环试验数据对系统进行辨识,辨识出的系统矩阵为
由于试验设计为开环状态下的试验,故直接馈入矩阵D为0,所以程序中未予计算。
4 结果分析
针对计算出的系统模型,使用未参与辨识的200组数据进行验证,验证数据的分布如图3所示。
将验证数据代入所辨识出的系统模型,模型计算出的数据与试验数据的比较如图4所示。
图4上半部分为预测出的空燃比与试验值的绝对误差分布图;下半部分为相对误差分布图。由图4可知,模型预测的空燃比绝对误差分布在-0.2647~0.4475之间,相对误差分布在-2.25%~3.59%之间,模型计算的结果与试验值吻合程度高。说明子空间辨识算法N4SID在辨识空燃比模型方面准确、有效。由于转速信号的周期性采样,计算结果也大致呈周期性分布。
验证数据的输入值都假定是准确和稳定的。但在发动机实际运行过程中,对数据进行采集时均会夹杂外界的干扰信号,绝对准确无扰动的数据在试验过程中不可能产生。为此,为验证所辨识出的模型抗扰动的能力,在验证数据中分别单独对输入信号添加零均值,方差为信号平均值±1%范围内分布的白噪声信号,以此检验模型的抗扰动能力。
添加扰动信号后,空燃比验证误差分布图如图5和图6所示。
由图5、图6可知,转速加入白噪声信号后,输出数据的绝对误差与相对误差几乎与不添加白噪声信号时的相同,可见辨识出的模型对转速的变化有较大的抗扰能力。喷油量信号加入白噪声后,空燃比的绝对误差与相对误差波动幅度小,模型对喷油量的干扰信号具备抗扰能力。当对进气量添加白噪声后,模型预测出的空燃比绝对误差、相对误差均产生大幅度的波动,相对误差限跃升至-14%~10%,说明辨识出的模型对进气温度的波动比较敏感。分析其原因,可能是用于辨识的数据中进气温度变化频率最小,每250个采样点才产生进气温度的阶跃变化,由此导致辨识出的模型对进气温度变化敏感。
将辨识所得的模型应用于不同发动机工况,此处任意选取4个工况点进行对比,将进气温度和喷油量分别定为283 K、4.1 g/s,转速分别为1 372 r/min、4 859 r/min、5 128 r/min、5 732 r/min。其所预测出的发动机空燃比与发动机仿真试验所得的空燃比见表2。

表2 模型预测空燃比与发动机仿真试验空燃比对比
由表2可知,在所选取的工况点下,经辨识得出的模型预测出的空燃比值与发动机仿真试验所得的空燃比值符合度好,预测的相对误差在±5%以内。
经以上分析可知,对于多输入下的发动机空燃比动态模型建模,传统的基于物理分析建模的方法较为复杂,且不易于考虑多参数的影响。而应用子空间方法针对试验采集的大量样本数据,进行快速高效辨识,可以解决物理建模繁琐低效的缺陷,且辨识的精度高,抗输入干扰的能力强,是发动机瞬态空燃比控制建模的有效方法。
5 结论
(1)推导了子空间辨识N4SID算法的主要过程,基于该算法的限制条件在GT-Power软件中设计了发动机开环状态试验,采集了1 200组各工况下的数据,其中1 000组数据用于模型的辨识,200组数据用于模型的验证。
(2)辨识程序辨识出的3阶状态空间模型具有最优的精度,模型计算出的空燃比绝对误差限为-0.2647~0.4475、相对误差限为 -2.25%~ 3.59%。
(3)向验证数据输入信号添加零均值,方差为各信号平均值1%的白噪声后发现,辨识出的模型对转速、喷油量的波动抵抗力强。而对进气温度变化敏感,究其原因可能在于采样数据中进气温度变化频率低,造成模型对进气温度的敏感性增强。
(4)模型预测值与GT-Power仿真试验值的相对误差在±5%以内,辨识出模型的精度符合空燃比控制建模需求。
[1]BRUNO B A,SANTAVICCA D A,ZELLO J V. LIF Characterization of Intake Valve Fuel Films during Cold Start in a PFI Engine[C].SAE Paper 2002-01-2751.
[2]NEYACHENKO I I. Method of A/F Control during SI Engine Cold Start[C].SAE Paper 981171.
[3]AQUINO C F. Transient A/F Control Characteristics of the 5 Liter Central Fuel Injected Engine[C]. SAE Paper 810494.
[4]HENDRICKS E,VESTERHOLM T,KAIDANTZIS P,et al. Nonlinear Transient Fuel Film Compensation (NTFC)[C].SAE Paper 930767.
[5]Xu Hongming. Control of A/F Ratio During Engine Transients[C]. SAE Paper 1999-01-1484.
[6]ARSIE I, PIANESE C, RIZZOA G,et al. An Adaptive Estimator of Fuel Film Dynamics in the Intake Port of a Spark Ignition Engine[J]. Control Engineering Practice, 2003,11(3):303-309.
[7]钟祥麟. 基于油膜模型的多点喷射汽油机瞬态工况控制研究[D].长春:吉林大学, 2007.Zhong Xianglin.Study on Control of MPI Gasoline Engine in Transient Condition Based on Fuel Film Model[D].Changchun:Jilin University,2007.(in Chinese)
[8]李顶根,舒咏强. 汽油机进气道油膜模型参数辨识算法的研究[J].内燃机学报,2009,5(4):15-22.Li Dinggen,Shu Yongqiang. Research of Parameter Identification Algorithm of Intake Port Fuel Film Model for Gasoline Engine[J].Transactions of CSICE,2009,5(4):15-22.(in Chinese)
[9]姚栋伟,吴锋,朱一峰,等. 基于 EKF 算法的进气道燃油状态观测器研究[J]. 内燃机学报,2010,4(28):374-379.Yao Dongwei,Wu Feng,Zhu Yifeng,et al.Study on Observer of Fuel Dynamics in Intake Port of SI Engines Based on EKF Algorithm[J].Transactions of CSICE,2010,4(28):374-379.(in Chinese)
[10]Van OVERSCHEE P, de MOOR B. Subspace Identification for Linear Systems:Theory-Implementation-Application[M].Dordrecht:Kluwer Academic Publishers,1996.
[11]QIN S J. An Overview of Subspace Identification[J].Computers and Chemical Engineering .2006(30):1502-1513.
猜你喜欢
润滑与密封(2022年9期)2022-09-21
成都信息工程大学学报(2021年5期)2021-12-30
天津外国语大学学报(2021年1期)2021-03-29
小读者之友(2020年11期)2020-12-23
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
初中生世界·九年级(2020年2期)2020-04-10
读与写·教育教学版(2017年10期)2017-11-10
汽车文摘(2017年6期)2017-07-18
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10