
一种新型高速立式车床工作台结构设计
2012-10-23 05:50:14李立强
制造技术与机床 2012年6期
李立强 姜 辉
(齐重数控装备股份有限公司,黑龙江齐齐哈尔 161005)
目前,我国立式车床工作台一般采用工作台底座侧面与立柱前端面联接固定的方式。首先,工作台底座与立柱的联接刚度不高;其次,工作台的中心与立柱的中心不重合,机床整机不是热对称结构;最后,工作台在高速、重载条件下工作时,工作台底座热变形严重,工作台在长时间连续工作时精度稳定性低,严重影响了机床的整机精度,并且工作台的主传动需要单独的主变速箱传动,传动链长、传动结构复杂以及传动效率低。目前,数控立式车床工作台导轨一般采用滚动导轨或静压导轨结构,滚动导轨一般由1套双列圆柱滚子轴承和2套推力轴承组成,工作台端跳、径跳精度分别需要径向、轴向2种、共3套轴承来保证。现工作台滚动导轨结构轴承种类和数量多、零件多、成本高、结构复杂,由于零件综合累积误差过大而使工作台精度超差的问题经常发生。而静压导轨工作台结构除了采用静压油室代替大型推力轴承承受工件载荷和切削力外,其余结构与滚动导轨工作台结构相同。静压导轨工作台结构还需要一套液压装置。静压导轨工作台结构的制造、日常维护成本高。
1 新型高速立式车床工作台结构
为了解决上述问题,我们设计了一种新型高速立式车床工作台结构,见图1。该工作台结构主要由工作台、齿圈组件、工作台底座组件、Ⅱ轴组件、主电动机组件和编码器组件等组成。
1.1 工作台底座组件的结构
交叉滚子轴承5内环圆柱孔安装在工作台底座7上部定心外圆柱面上,内环下端面靠紧工作台底座7上部定心外圆柱面的轴肩。压环4的下端面与工作台底座7上部定心外圆柱面的上端面联接配合,压环4的外圈轴肩压紧交叉滚子轴承5内环上端面,将交叉滚子轴承5内环轴向定位在工作台底座7上。立柱10安装在工作台底座7后部上联接面上。
1.2 工作台的结构
工作台1安装在工作台底座7的上部,工作台1下端面与齿圈座2上端面联接配合,工作台1的下部定心止口外圆柱面与齿圈座2定心内孔配合,并通过与齿圈座2配合的交叉滚子轴承5与工作台底座7保持同心。工件和工作台1的重量全部通过交叉滚子轴承5作用在工作台底座7上。交叉滚子轴承5同时承受工作台1、工件和切削力等载荷所产生的轴向力和径向力。
1.3 齿圈组件的结构
齿圈座2的圆柱孔安装在交叉滚子轴承5外环的外圆柱面上,齿圈座2内圆柱沉孔的台阶面压紧交叉滚子轴承5外环上端面,齿圈3内孔套在齿圈座2外圆柱面上,齿圈3上端面紧靠在齿圈座2外轴肩下端面上。法兰盘6上端面安装在齿圈座2下端面上,法兰盘6沉孔端面压紧交叉滚子轴承5外环下端面,将齿圈座2、齿圈3轴向定位在工作台底座7上。
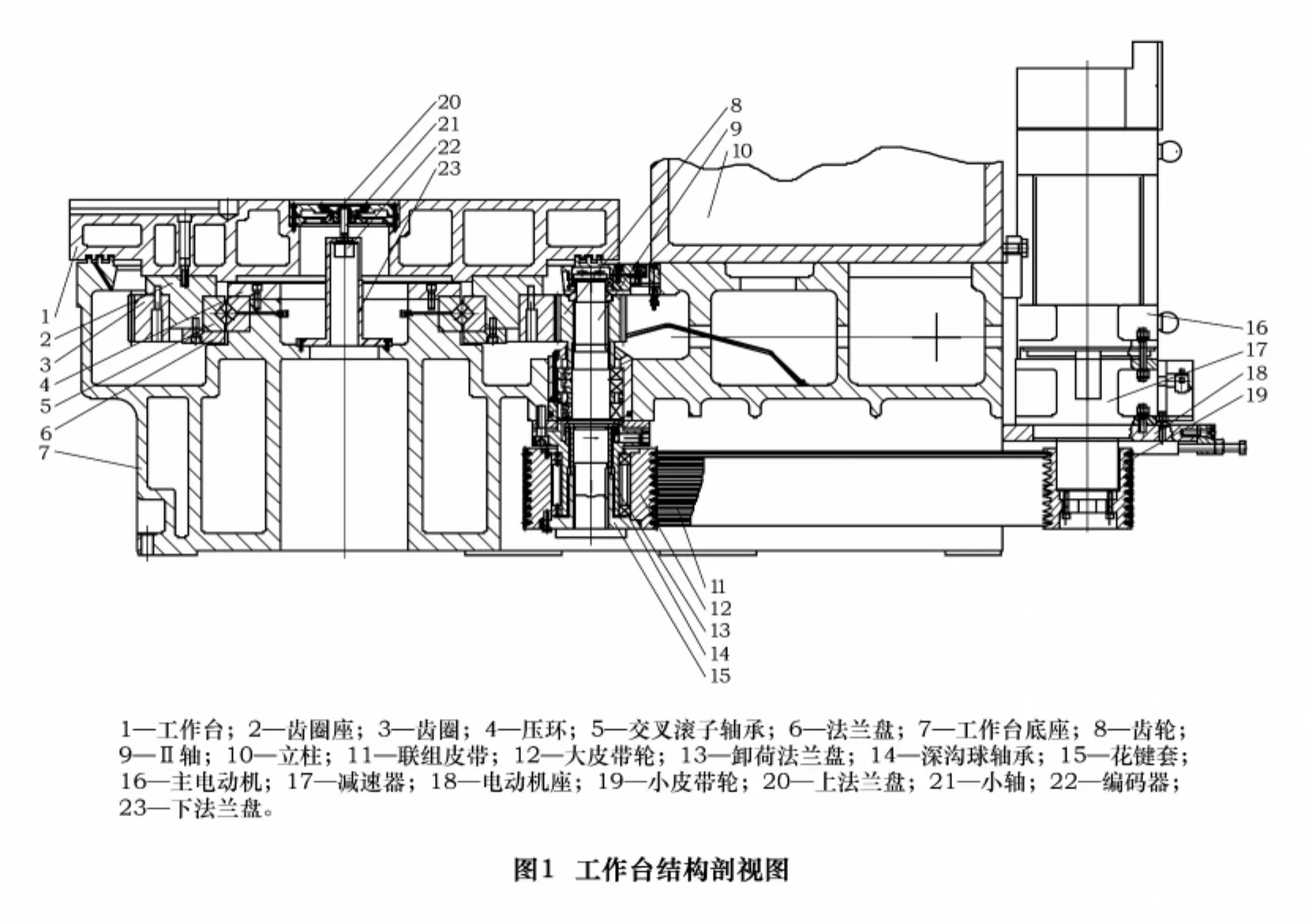
1.4 Ⅱ轴组件的结构
Ⅱ轴9安装在工作台底座7右部Ⅱ轴孔中,齿轮8花键孔套在Ⅱ轴9上部花键轴上。齿轮8与齿圈3啮合传动,卸荷法兰盘13安装在工作台底座7的Ⅱ轴孔下端面上,深沟球轴承14内环套在卸荷法兰盘13的卸荷定心轴上,大皮带轮12的内孔套在深沟球轴承14的外环上。花键套15的花键孔套在Ⅱ轴9下部的花键轴上,花键套15的沉孔端面压在深沟球轴承14外环端面上,并通过深沟球轴承14将大皮带轮12轴向定位在Ⅱ轴的下部。联组皮带11对大皮带轮12的拉力通过深沟球轴承14、卸荷法兰盘13作用在工作台底座7的Ⅱ轴孔下端面上。
1.5 主电动机组件的结构
电动机座18安装在工作台底座7的后部侧面上,减速器17下端面安装在电动机座18上端面上。主电动机16与减速器17直联传动,并安装在减速器17上端面上。小皮带轮19内孔固定在减速器17的输出轴上,联组皮带11套在小皮带轮19、大皮带轮12的V形槽上。
1.6 编码器组件的结构
下法兰盘23安装在工作台底座7中部的中心孔上端面上,编码器22安装在下法兰盘23上部联接面上。上法兰盘20安装在工作台1中心孔台阶面上,小轴21安装在上法兰盘20的中心处,并通过编码器22的联接接头与编码器22相联接。
2 新型工作台结构特点
该工作台采用整体式热对称结构,立柱底面坐在工作台底座后部上联接面上,立柱与工作台底座的联接刚度高,立柱中心与工作台底座中心重合,工作台热稳态精度高。工作台的主传动采用主电动机经减速器二档变速后,通过联组皮带直接将主电动机扭矩传至工作台Ⅱ轴的结构,工作台主传动链短,传动效率高。本工作台结构具有热对称、动静刚度高、精度高、精度保持性好、承受载荷大、转速高、轴承种类和数量少、零件数量少、成本低、可靠性高、工艺性好的特点。
3 新型高速式车床工作台的工作过程
通过按钮站控制主电动机16得电,主电动机16通过减速器17降速后驱动小皮带轮19旋转,再通过联组皮带11将扭矩传递给大皮带轮12,再通过花键套15带动Ⅱ轴9、齿轮8旋转、齿轮8与齿圈3啮合传动通过齿圈座2驱动工作台1旋转。工作台1通过固定在其中心孔处的上法兰盘20、小轴21带动编码器22旋转,编码器22将工作台1的转速反馈给数控系统形成闭环控制。
4 结语
新型高速立式车床工作台结构,经过在1.6 m数控立式车床上使用后验证,该工作台结构具有极限转速高、承受载荷大的特点,可承受外载荷的轴向力、径向力和颠覆力矩,大大提高了机床的可靠性,并能大幅度降低机床成本。该结构已在我公司的单柱系列数控立式车床上全面投入使用,经济效果显著,该结构已被我公司正式申请了国家发明专利,专利申请号为201110108934.3。
猜你喜欢
机械制造(2022年6期)2022-09-01 07:35:00
汽车实用技术(2021年16期)2021-09-09 02:15:40
装备制造技术(2021年4期)2021-08-05 07:39:54
新商务周刊(2018年12期)2018-12-08 23:34:06
时代汽车(2018年12期)2018-06-18 03:43:52
制造技术与机床(2017年11期)2017-12-18 06:47:13
宇航材料工艺(2017年5期)2017-11-02 03:15:30
长沙大学学报(2015年5期)2015-01-04 02:06:28
中学科技(2014年3期)2014-06-04 08:10:47
金属加工(热加工)(2013年5期)2013-08-02 08:39:40
