
基于椭球拟合的三轴磁传感器误差补偿方法*
2012-10-21 03:45:04刘文怡张晓明
传感技术学报 2012年7期
李 勇,刘文怡,2*,李 杰,张晓明,蒋 窍
(1.中北大学电子测试技术重点实验室,太原 030051;2.中北大学仪器科学与动态测试教育部重点实验室,太原 030051)
随着现代科学技术的进步,许多工业领域对载体姿态测量精度的要求越来越高。为了获得高精度、高可靠性的导航信息,就必须对传感器进行有效的误差标定与补偿[1]。传统的传感器标定补偿方法主要有四位置法、八位置法等,存在计算量大、操作复杂、不易实现等不足,尤其是三轴磁传感器的标定补偿,对标定设备要求极高,十分容易引入外界磁干扰,从而导致结果不准确。加之,现有多轴矢量传感器性能参数的标定补偿方法主要是针对各单轴传感器的安装误差进行补偿,而忽略了对多轴矢量传感器中各单轴传感器的零偏误差、灵敏度误差的同时补偿.针对上述问题,本文以三轴磁传感器的制造误差为例,分析误差产生机理,建立误差模型,再利用基于椭球假设的三轴磁传感器误差标定方法进行标定补偿。
1 误差产生机理分析及建模
根据传感器误差产生机理的不同,可将三轴磁传感器的制造误差大致分为三类:不正交误差、灵敏度误差、零位误差[2-8]。
1.1 不正交误差
三轴磁传感器轴间的不正交误差是指由于在制造过程中三个磁传感器的测量轴无法保证两两完全正交所引起,其不正交角模型如图1所示。
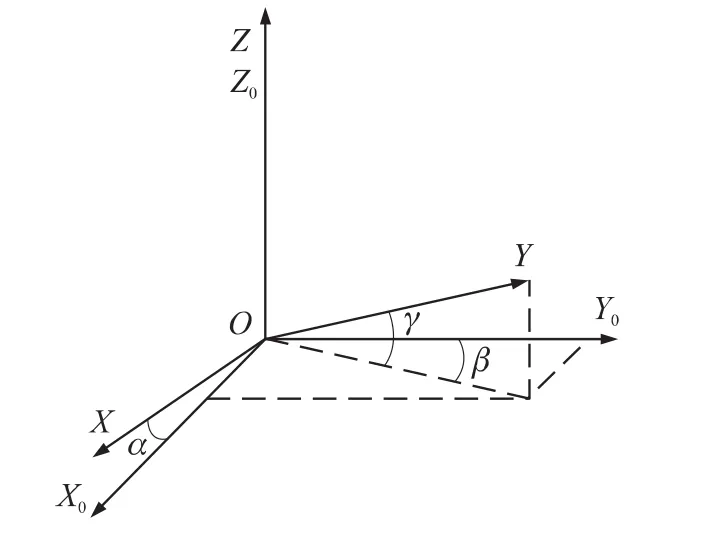
图1 不正交角模型
如图1所示,X0、Y0、Z0表示理想正交模型中三轴磁传感器的矢量指向;X、Y、Z表示实际磁传感器三轴的指向;假设Z轴与正交模型中的Z0轴重合,且XOZ面与X0OZ0面重合,α为X轴在XOZ面与轴X0的夹角;β为Y在X0OY0面的投影与Y0的夹角;γ为Y与X0OY0面的夹角。由此可建立三轴磁传感器不正交角的数学模型如下:
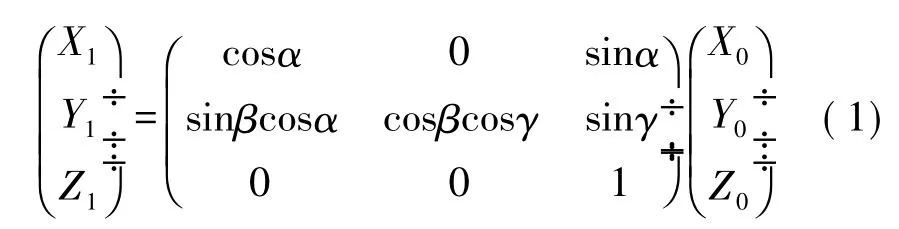
式中:X1、Y1、Z1为存在不正交误差情况下的三维磁场强度;X0、Y0、Z0为三轴磁传感器的理论输出值;α、β、γ为三轴磁传感器轴间的不正交误差角,具体定义如图1。
1.2 灵敏度误差
轴间静态灵敏度误差是由于三轴磁传感器各轴的灵敏度不同、测量信号的放大电路特性不完全相同而引起的测量误差,其数学模型为:

式中:X2、Y2、Z2为存在灵敏度误差、不正交误差情况下的三维磁场强度;X1、Y1、Z1为存在不正交误差情况下的三维磁场强度;kx、ky、kz为三轴磁传感器的灵敏度。
1.3 零点偏移误差
由于实际使用时,传感器、模拟电路和A/D转换的零点不为零而产生了零点偏移误差,其数学模型为:
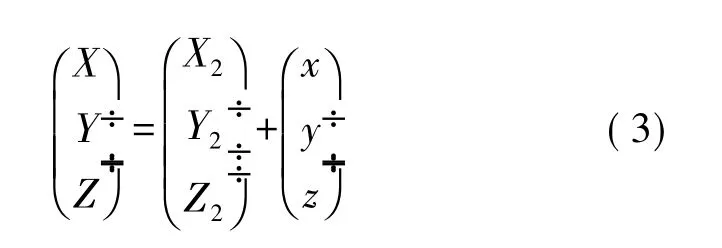
式中:x、y、z为三轴磁传感器的零偏,X、Y、Z为存在零点偏移误差、灵敏度误差、不正交误差情况下的三维磁场强度。
1.4 误差建模
综上所述,建立三轴磁传感器误差的数学模型:

2 误差标定与补偿
2.1 误差标定
理想情况下,三轴磁传感器的理论输出值X0、Y0、Z0可构成圆球面,但是由于制造误差的存在,圆球面畸变成原点平移的椭球面[9-12]。
先记理论三维矢量和为Gb,则方程(4)可表示为:

式中,K为误差系数矩阵;G为三轴磁传感器理论输出;g为三轴磁传感器零偏。假设最佳拟合椭球曲面的二次型函数F(ξ,Z)用矩阵记号表示为:

根据式(5)和式(6)可得到:
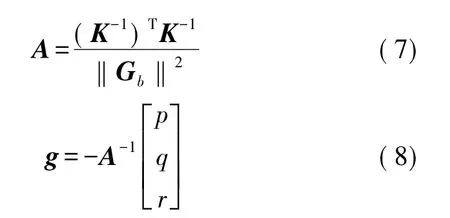
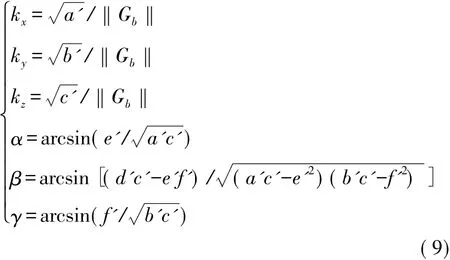
根据式(7)、式(8)可以计算得到式(4)其中参数kx、ky、kz、α、β、γ 的估计值如下:
2.2 误差补偿
在误差模型的基础上,根据式(4)可求得传感器的理论输出:
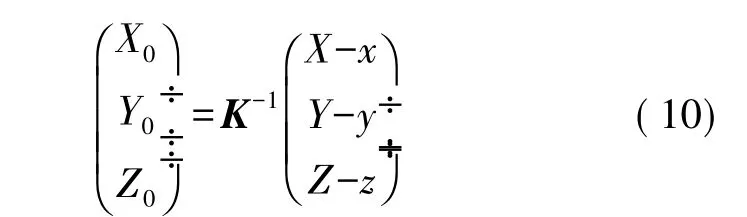
式中:
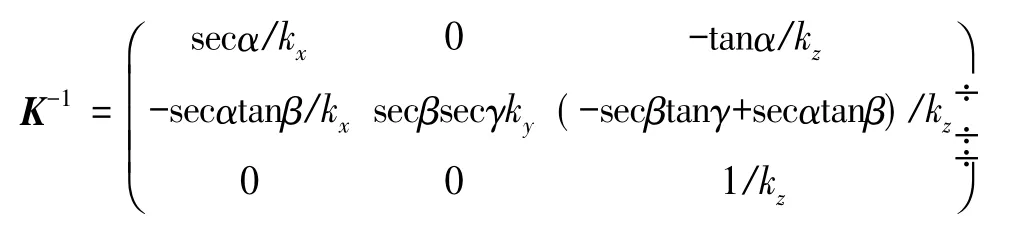
为误差补偿系数矩阵,α、β、γ可由误差标定得出,(x yz)T为标定得到的三轴磁传感器零偏,kx、ky、kz为三轴磁传感器的灵敏度。
将计算结果代入式(10),即可得到三轴磁传感器的误差修正数学模型,依据所获得的误补偿数学模型即可对该三轴磁传感器的测量结果进行误差补偿。
3 实验验证
为了验证该误差补偿方法的正确性和有效性,本文以三轴磁传感器HMC1043为例,采集磁传感器的实时输出,根据本文所提出的补偿方法进行误差补偿,并利用MATLAB软件进行试验数据处理。
首先,选择磁环境较为洁净的地方,在空间全范围内旋转三轴磁传感器,并进行实时测量,从而获得一系列丰富的测量值。试验后,利用MATLAB软件绘制出采集的三维磁场数据如图2所示。
根据上述三维磁传感器误差标定方法,解算出磁传感器的误差补偿系数:


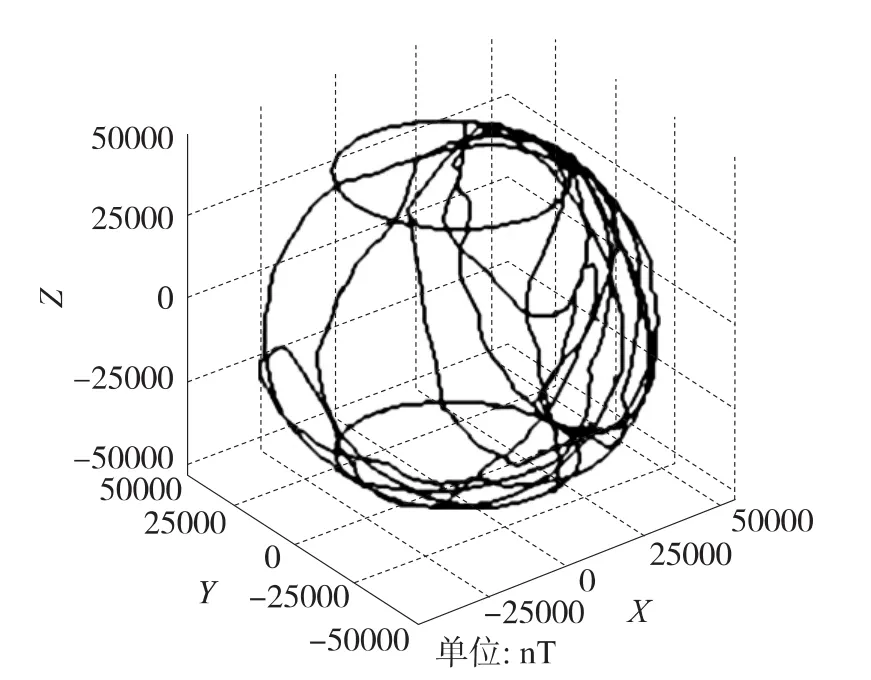
图2 三维磁场计输出数据
理论上,三维磁场的矢量和是一个固定常值,但由于实际环境、标定设备等的影响,实际测得三维磁场矢量和波动往往比较大。本次试验将补偿前后三维磁测数据模值标定前后进行对比,补偿前三维磁测数据模值的波动高达3 000 nT,而补偿后三维磁场模值的波动为400 nT左右,具体如图3所示。
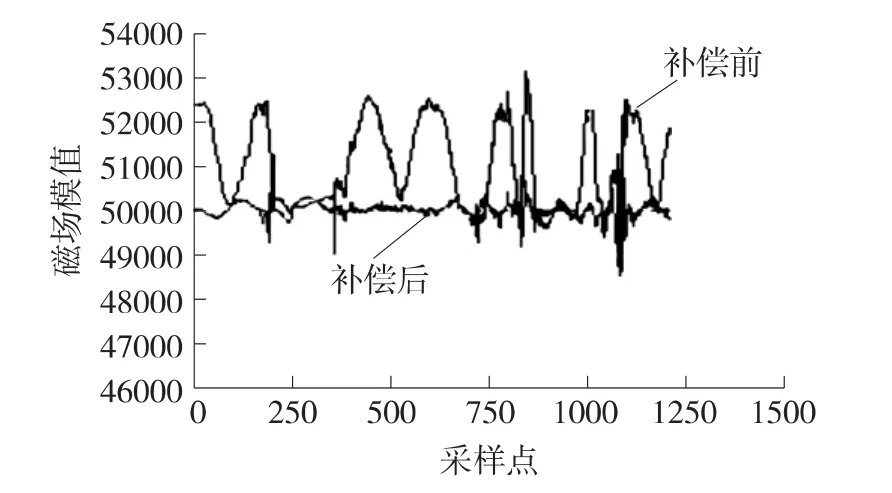
图3 补偿前后磁场模值
实验结果表明该方法能够正确地标定三维磁传感器的误差系数,有效地将已平移的椭球面逆变成圆球面,实际使用误差控制在1°以内,实现了三轴磁传感器制造误差的高精度补偿。
4 结束语
本文所提出的误差补偿方法是基于圆球面畸变成原点平移的椭球面的假设提出的,其逆过程就是误差补偿过程。应用椭球拟合方法来确定矢量传感器的误差修正系数,修正过程简捷、省时、易于实现,能够广泛应用于三轴矢量传感器的误差标定和有效补偿。
[1]杨晓东,王炜.地磁导航原理[M].北京:国防工业出版社,2009:67-80.
[2]袁智荣.磁航向传感器使用中的误差补偿[J].测控技术,2001,20(1):58-59.
[3]李秉玺,赵忠,孙照鑫.磁阻传感器的捷联式磁、航向仪及误差补偿[J].传感技术学报,2003,6(2):191-194.
[4]张晓明,赵剡.一种快速载体磁场补偿方法研究[J].中北大学学报(自然科学版),2009,30(3):286-291.
[5]杜英,李杰,孔祥雷,等.无航向基准条件下电子罗盘的误差补偿方法研究[J].传感技术学报,2010,23(9):1285-1288.
[6]Grammalidis N G,Strintzis M.Head Detection and Tracking by 2-D and 3-D Ellipsoid Fitting[A].IEEE Computer Graphics.International[C]//Geneva:IEEE,2000:221-226.
[7]臧爱云,原魁,严志刚.磁传感器在导航系统中的应用[J].高技术通讯,2004,10:53-56.
[8]Li Q G,Griffiths J.Least Squares Ellipsoid Specific Fitting[A].IEEE,Proceedings of the Geometric Modeling and Processing 2004[C]//Beijing:IEEE,2004:335-340.
[9]雷芳.地磁陀螺组合的姿态敏感技术[D].太原:中北大学,2009.
[10]闫蓓,王斌,李媛.基于最小二乘法的椭圆拟合改进算法[J].北京航空航天大学学报,2008,34(3):295-298.
[11]郭鹏飞,华春红,任章,等.基于递推最小二乘的航姿系统罗差校正[J].中国惯性技术学报,2008,16(1):24-27.
[12]王永强.基于地磁测量的数字罗盘研究[D].上海:上海交通大学,2007.
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23 13:46:54
新高考·高二数学(2022年3期)2022-04-29 05:08:09
当代陕西(2022年6期)2022-04-19 12:11:54
娃娃乐园·综合智能(2021年12期)2022-01-18 05:46:42
汽车维修与保养(2020年11期)2020-06-09 05:42:16
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中学生数理化·高二版(2016年12期)2017-02-28 10:08:42
光学精密工程(2016年3期)2016-11-07 09:03:34
中学数学杂志(初中版)(2016年5期)2016-11-01 11:22:43
Coco薇(2016年1期)2016-01-11 16:53:24
