
基于形态特征的水下小目标识别方法
2012-10-20 06:59:20李轲,刘忠,毛盾
舰船科学技术 2012年1期
李 轲,刘 忠,毛 盾
(海军工程大学,湖北 武汉 430033)
0 引言
传统上,海上探测和防御的对象主要是舰船和潜艇等大型目标,但是印度孟买发生的恐怖袭击和2008年5月斯里兰卡泰米尔“猛虎”组织发动的水下偷袭让世界各国开始重视水下小目标的威胁。恐怖组织利用“非对称”战的特点,使用蛙人、蛙人运载器、水下机器人等小型武器对海军舰艇基地、民用港口、海上钻井平台等海滨重要设施进行攻击,将会造成巨大的生命和财产损失[1]。在这种形势下,各国都投入了大量的人力、物力来研究针对蛙人、水下机器人等小目标的检测、识别技术。
目前,声波在水中进行远距离传播的效果最好,低频声波在水中的传播距离甚至可以达到几百千米。因此,声信号就成为水下探测技术中的首选探测信号,而声呐也就成为水下目标探测的主要电子设备。蛙人探测声呐是一种以小目标为探测对象的高分辨率图像声呐,工作频率越高,系统方位分辨率越高,对小目标的描述就越细致。蛙人探测声呐的工作环境主要是浅海。由于浅海地形复杂、混响强度较高,导致声呐图像上会出现大量干扰信号,目标可能淹没在这些干扰信号中,影响水下小目标的识别效果[2]。
本文旨在通过数字图像处理技术结合水下小目标的物理特性,对所获取的声呐图像进行处理、分析和理解,提出基于形态特征的水下小目标识别方法,并在实验中得到了令人满意的结果。
1 国内外研究现状[3]
目前,世界上只有几个军事发达国家拥有基于蛙人探测声呐的水下小目标识别系统,下面简要介绍一下各国的发展状况。
美国C-TECH公司推出的CSDS-850 mm警戒声呐是其第三代高性能图像声呐,安装在港口或舰船上用于探测携带开式或闭式呼吸器的水下蛙人、运载器及小潜艇等小目标。其提供的技术指标为:探测距离最远可达2 000 m;水平全向探测也可扇区扫描;垂直窄波束并可以电子俯仰;系统频率80 kHz,高分辨率波束形成,目标自动检测及报警。
俄罗斯、乌克兰的MOK-А水声系统是主动发射的海洋警戒装置,用于检测非法进入的潜水器、蛙人及水面运载器等。该系统采用匹配场设计原理,最大的特点是可以探测带吸声材料的隐身蛙人,探测距离达100 m左右。另外,挪威考达公司的Echo scope系列三维成像声呐也用于水下目标成像和蛙人探测中。
国内相关单位也已开展了蛙人探测声呐的相关研究工作。中国科学院声学研究所成功研制了全部自主知识产权的蛙人探测声呐,该系统在北京奥运会的水下安保中得到了成功应用。
2 水下小目标识别方法
2.1 图像预处理
图像预处理主要完成对孤立热噪声和混响噪声的去除,提高图像的信噪比,包括中值滤波、阈值化等步骤。
2.1.1 中值滤波
中值滤波的主要目的是去除孤立噪声,然而由于蛙人等目标本身也很小,因此在去除噪声的同时必须注意保留这些小目标的相关信息。在蛙人探测声呐图像中。均值滤波和中值滤波是图像预处理中最常用的2种方式。然而,均值滤波会平滑掉目标的边沿信息,降低目标的灰度值,从而影响后续目标判定的效果;相反,中值滤波有助于保留目标的这些特征,同时消除孤立噪声。另外,由于水下小目标与噪声相比具有较高的强度,我们采用式(1)的方法对高强度小目标进行保护,即当某像素的N邻域按由大到小排序后的第k个灰度值大于阈值T时,保持该像素的灰度值不变,这里要求k<(N+2)/2。

其中,f'i(x,y)为像素(x,y)的N邻域按由大到小排序后的第i个灰度值。N一般为偶数,取4或者8。f'1(x,y)≥f'2(x,y)≥…≥f'k(x,y)≥…≥f'N+1(x,y),k<(N+2)/2。例如,排序后8邻域内的第3个灰度值超过220(其中灰度最大值为255),则该像素的灰度值不变。实际上,中值滤波是它的特殊情况。
2.1.2 分段自适应阈值化
阈值化的主要目的是消除面积大而强度较弱的混响噪声,与传统的阈值化不同,这里为了保留目标的灰度信息,并结合蛙人探测声呐的特点,进行单边分段自适应阈值。
单边阈值是指在阈值化过程中,只将小于阈值的像素点设置为背景,而大于阈值的像素点则保持灰度值不变。阈值化后的图像为:

分段自适应阈值是将整个图像按照与声呐圆心的距离分为近区、远区,对每个区域分别进行自适应阈值化。一般而言,由于近区混响噪声强,相应的阈值也要高一些,而远区的阈值要低一些。
自适应阈值分割的基本思想是根据虚警率和成像背景的变化情况动态地改变阈值。算法通过在固定阈值的基础上增加1个反映成像环境整体变化情况的附加项Δt来设置动态阈值,其数学表达式描述如下:

式中:M×N为检测区域的像素总数;Δt反映了成像环境的整体变化情况。如果图像成像环境变化较小,动态阈值Δt很小;如果图像变化明显,则动态阈值Δt将明显增大,这就有效地抑制了成像环境变化带来的影响;f'(x,y)为当前帧中像素(i,j)的灰度值;f(x,y)为初始帧中像素(i,j)的灰度值,这是个定值,可事先存储。
然而,对每帧图像都改变阈值是没有必要的,也会增加系统的负担,降低系统效率。因此算法为每帧图像设置了1个二元组(CF,CT)。其中CF为本帧中检录到的虚警目标的数量,CT为本帧中检录到的目标的总数量,由CF和CT可以计算出本帧中检录到的目标的虚警率。
规则1 当连续N帧所检测到目标总数大于阈值Ttotal,且虚警率也大于阈值Tratio时,阈值按式(3)进行更新。
当连续N帧所检测到目标总数大于阈值Ttotal,且虚警率也大于阈值Tratio时,说明成像环境持续恶化,原来的阈值过低已经不再适应于新的环境。在这种情况下,原来的阈值T按式(3)式通过附加Δt升高到T'。阈值的升高是渐进式,随着阈值的提高,系统所检测到的目标数和虚警率都会降低,如果新的阈值T'仍达不到要求,目标数和虚警率仍高于Ttotal和Tratio,系统会继续按照式(3)式进行更新阈值,直到获得达到要求的阈值为止。
规则2 每隔一段时间t将阈值重新置回初始状态T0。
这是因为成像环境的恶化大多数情况下是突发性的,持续时间不会太长。例如下雨天会对蛙人探测声呐的成像效果产生较大的影响,不过这种影响一般也就持续3~5 h,多则2~3天,之后声呐的成像环境将恢复到原来的状况,因此原来升高的阈值有必要降回初始水平,否则会影响目标检测的效果。如果这时的成像环境仍然没有改善,根据规则1,阈值T仍将按式(3)式再次进行更新。系统重置阈值的时间间隔可由用户根据情况输入。
2.2 基于形态特征的小目标检测方法
首先使用背景相减法,通过统计得到背景模型中的1个背景模型,然后将当前帧与背景模型相减,如果像素差值大于某一阈值,则判断此像素属于运动目标,否则属于背景图像。这种方法能较好地提取出目标的特征数据,但对于外界环境的变化非常敏感。本文所提出的基于形态特征的小目标检测方法的原理非常简单,其主要工作过程如图1所示。首先利用式(4)式计算背景图像B(x,y)与当前图像f(x,y)的差,然后对差分图像D(x,y)进行二值化,最后对二值化后的图像R(x,y)进行形态分析,当图像中的某一连通区域的形态特征满足所设定的判断规则时,就认为这个连通区域为蛙人或水下机器人等水下小目标。

图1 处理流程图Fig.1 Processing flow chart


目标形态特征判断准则如下:
1)对连续三帧图像进行基于数学形态学的骨架提取,得到三帧图像中各个对象的骨架,然后分别计算相对应对象的骨架长度平均值,再将这些平均值和已知的先验值进行比较,进行初步目标识别,并将超出先验值范围的干扰图像剔除掉;
2)依次计算所得图像中余下每一个对象的面积平均值,然后与先验值进行比较,判断蛙人目标的存在,剔除超出判定范围的干扰目标。这样经过以上两步处理后剩下的对象既满足长度要求、也符合面积要求,可判定为蛙人目标。
步骤1 计算连续三帧图片中相对应的各个对象骨架长度的平均值Li,将它作为本轮判断的骨架长度值:
然后判断不等式: α≤Li≤β。
其中,α和β是关于蛙人目标骨架长度范围的经验值,若不等式不成立就剔除该对象,若成立就进入步骤2。
最后判断不等式: γ≤Sj≤δ。
其中,γ和δ是关于蛙人面积范围的经验值。若不等式成立则判定该对象是蛙人目标,否则重新读取3帧图像,进入步骤1。
3 实测声呐图像处理结果
为了验证本文所提出算法的有效性,这里对含有蛙人目标的连续三帧实测声呐图像进行了处理。实测环境:晴天,蛙人着闭式潜水衣,潜水深度10 m,海况3级。图2中(a)~(c)分别显示了蛙人探测声呐的连续3帧伪彩色图像,(d)~(f)分别显示了经本文所提出预处理算法处理后的图像,(g)~(i)显示了经过基于形态特征检测后的目标图像。从图中可以清楚地看到,从声呐正北方向侵入的蛙人被成功地检测到。
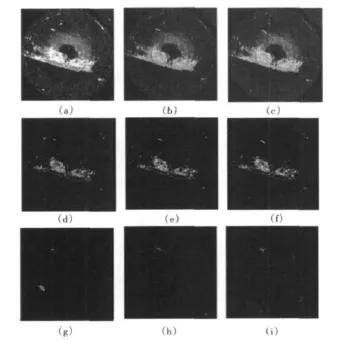
图2 实测声呐图像Fig.2 Practical sonar image
4 结语
从实验结果可以看出,本文提出的基于形态特征的水下小目标识别方法能在混响严重的浅海区域成功地检测到蛙人等小目标,而且检测准确率高,运算速度快,符合工程实践要求。尽管如此,对于水下小目标检测,本文只做了初步探索,还有很多问题需要进行研究和解决。
[1]张波,陈小泉.蛙人探测及蛙人探测声呐[J].中国科技信息,2009,(2):51 -52.ZHANG Bo,CHEN Xiao-chuan.Diver detecting sonar[J].China Science and Technology Information,2009,(2):51-52.
[2]田晓东,周德超,刘忠.基于声图像序列的快速目标跟踪算法[J].计算机仿真,2007,24(7):5 -8.TIAN Xiao-dong,ZHOU De-chao,LIU Zhong.A fast object tracking algorithm based on sonar image sequences[J].Computer Simulation,2007,24(7):5 -8.
[3]蒋立军,杨娟,许枫.蛙人探测声呐技术研究进展[J].科学通报,2009,54(3):269 -272.JIANG Li-jun,YANG Juan,XU Feng.Technological progress of diver detection sonar[J].Chinese Science Bulletin,2009,54(3):269 -272.
[4]李毅,等.一种改进的帧差和背景减相结合的运动检测方法[J].中国图像图形学报,2009,14(6):1162 -1168.LI Yi,et al.An improved method for motion detection by frame difference and background subtraction[J].Journal of Image and Graphics,2009,14(6):1162 -1168.
[5]李轲,刘忠,毛盾.基于反蛙人声呐的小目标检测算法[J].舰船电子工程,2010,30(7):173 -176.LI Ke,LIU Zhong,MAO Dun.Algorithm for detection of small target in sonar image based on anti- diver sonar[J].Ship Electronic Engineering,2010,30(7):173 -176.
[6]SARANGAPANI S,MILLER J H,POTTY G R,et al.Measurements and modeling of the target strength of diver[J].Oceans,2005,2(20 -23):952 -956.
[7]GONZALEZ R C.数字图像处理[M].北京:电子工业出版社,2007.
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
小哥白尼(军事科学)(2022年5期)2022-08-17 08:13:30
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
小哥白尼(军事科学)(2019年9期)2019-12-21 02:09:24
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
声学技术(2014年1期)2014-06-21 06:56:32
