
基于AFDX的潜用水声传感器信息传输网络
2012-10-20 06:59林恒清
舰船科学技术 2012年1期
王 伟,林恒清
(中国船舶工业集团公司船舶系统工程部水声对抗技术重点实验室,北京 100036)
0 引言
随着潜艇静音技术的飞速发展,单一的水声传感器难以捕捉到静音潜艇的行踪,为此,需要对多个水声传感器的探测信息进行多传感器信息融合,才能综合判断出静音潜艇。然而每个水声传感器的探测数据量相当庞大,所有传感器的探测数据完全上网,势必会影响到整个作战系统网络的实时性和可靠性,最终影响到潜艇的作战效能。
为了解决系统网络的实时性问题,需要对现有的以工业以太网为基础的作战系统网络进行升级,即升级为AFDX网络。
1 AFDX
航空电子全双工交换式以太网(Avionics Fullduplex Switched Ethernet Network,AFDX)是由工业标准以太网经过对航电系统适应性改造而成,除了可靠性和抗恶劣环境设计之外,适用性改造主要集中在实时性能的保证机制上。目前,AFDX已经被融入ARINC公司的飞机数据网络(Aircraft Data Network,ADN)工作组的标准化进程,并被采纳为由ARINC 664 part 7规范定义的标准。
AFDX网络采用虚拟链路(Virtual Link,VL)技术,并根据每个水声传感器数据流量分配专门的通信信道,克服了传统以太网由于传输链路共享造成信道冲突,既保证任一传感器数据传递的实时性,又不影响网络整体对作战系统命令等关键数据的实时传输。即AFDX能做到使每个网络传输请求必须得到服务,且最大的网络传输延迟(也被称为“端到端时延”)必须得到保证。该保证服务提供一种稳固的、数学可证明的帧端到端传输延迟的上界,有界延迟的保证意味着链路层次上保证一定量的带宽。
2 虚拟链路
2.1 虚拟链路(VL)的定义
AFDX是所谓的确定性网络,确定性主要是指时间的确定性,即实时性。AFDX由端系统,交换机和连接链路组成,实时性的性能保证机制主要右端系统实现,引进虚拟链路的概念,对带宽资源进行有效的分隔,实现逻辑大的流量隔离。
虚拟链路是从数据源通过多播地址发布的一路数据包流量,它在逻辑上类似于ARINC 429的单双工一对多链路,但物理上很多路VL共用1条以太网链路,并通过交换机进行交换和多播。
虚拟链路是1个概念化的通信对象,被定义了1个逻辑上的单向连接,从1个源到1个或多个目的端系统,如图1所示。

图1 1个虚拟链路等于1个路径Fig.1 One virtual link equal to one path
每个虚拟链路都被指定1个最大带宽,该带宽由系统集成者分配。
在ES支持的虚拟链路中,ES利用可用带宽提供逻辑隔离,不论某个分区试图在1条VL上得到怎样的带宽利用率,其他任何的VL的可用带宽不受影响。虚拟链路的处理通过一种流量控制机制获得的,这种机制将属于这个ES的不同的数据源的数据流进行规整,流量整形使得把各个帧分开(如图2所示),用以限制虚拟链路上瞬时的帧速率。对于每条虚拟链路,不论其他虚拟链路是如何使用带宽的,端系统的通信协议栈应该保证它所分配的带宽。

图2 虚拟链路流的规整Fig.2 Virtual link rate shaping
在发送端采用流量整形机制在VLs间分配通信资源。流量整形同时限制VL的突发度,决定了聚合流量的最坏条件下的排队延迟界限。
对每条VL定义:
1)最大帧长度为Lmax;
2)带宽分配间隔BAG为Tg。
其中Tg为给定的VL上前后2个数据包之间的最小间隔。
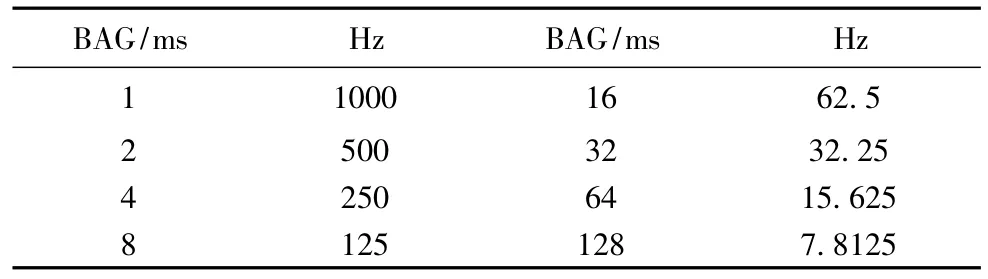
表1 带宽分配间隔的允许取值Tab.1 Permitted value of BAG(Bandwidth Allocation Gap)
按照ARINC664 part 7的规定,BAG的取值以ms为单位,呈2的幂次,如表1所示。主机上紧密相关的通信任务被称为子VL(sub-VL),AFDX的ES还可以将若干sub-VL合并为1条VL。
例如:3个sub-VL,它们的刷新频率分别是10,20和40 Hz,则它们的总频率是70 Hz(平均每秒有70条消息),相当于平均周期为14.4 ms。为了保证它们充足的带宽,VL的平均周期不能大于14.4 ms,经查表1,选择BAG=8 ms,刷新频率为125 Hz,相当于每秒最多可以有125个位置,异步的sub-VLs中的数据包根据到达时间的先后选定自己的位置。
2.2 VL的最大带宽
每条VL的特性都可以通过分析确定,设定确定的带宽规整流量控制,见图3所示。通过对每条VL同时规定带宽和帧发送间隔的界限来实现。
分配给这个VL的最大带宽是Lmax/Tg。
在任意时间,通过加大的帧间隔或使用更小的帧来减少使用的带宽,通过限定每条VL的特性,就能分析整个网络的确定性属性。

图3 虚拟链路的流量控制Fig.3 Virtual link flux controlling
3 AFDX使用实例分析
在工业交换式以太网中,由于没有为每个数据通道划分1个固定带宽的虚拟链路(VL),因此网络中某一瞬间,各个设备的每个软件模块都可能发出网络包,假设该时刻突发1 000个UDP包,又假设每个UDP包的包长度都为1 000 Byte,报文之间就会在网络中与其他报文发生资源的争用,从而导致每个数据包都有不同程度的时延。
又假设,最后被传输的数据包恰巧是武器发射命令“Z”,则该命令就被延迟了如下时间:

如果为网络上每个设备的每个软件模块的数据通道分配了固定和恰当的VL,那么系统集成者可以为武器发射命令“Z”设计出1个恰当的VL,假如该武器发射命令在10 ms内没有送达目的地,则该发射命令无效,以此可以设计出该VL的要求带宽:

即“Z”命令的VL需要分配1 Mbps的带宽就可以满足“Z”命令任何情况下的传输时延不会超过10 ms。
当然,在为“Z”命令分配1Mbps带宽的VL通道时,按照AFDX的规范,需要对各种数据包进行特性判断,给其分配1个恰当带宽的VL,尤其水声传感器的VL分配,要在一定带宽的网络通信系统下,给各个传感器的数据流分配合适的带宽,使其满足信息融合对原始探测数据信息的实时性和可靠性要求。
假如某水深传感器数据源信息报文的长度为1 000字节,消息周期为50 ms,则为其分配的VL带宽为:

即该传感器网络端口的带宽258 kbps,就可以满足其数据信息传输的要求。
在使用工业以太网网络时,该传感器没有安装AFDX端系统,其发送探测信息数据包的速度为百兆以太网口的速度,即100 Mbps,如此高的数据包速度,就在某个时刻消耗了整个带宽,然而在AFDX网络下,该设备端口被限速为258 kbps,因此有效避免瞬间网络超载,造成关键的发射控制命令被无边界的延迟。
4 结语
通过对AFDX网络及其VL(虚拟链路)等实时保证机制的介绍,又通过一个简要的实例分析,可以保证将来在越来越多水声传感器加装到潜艇平台上后,整个艇用网络通信系统不会因为传输越来越多的传感器信息,造成某些时刻把重要的武器发射命令无边界的不确定的延迟。在AFDX网络下,只要为每个数据通道设计出合理带宽的VL,就可以保证每个数据包有边界的确定延迟时间内被送达目的。
[1]熊华刚,李峭,黄永葵.航空电子全双工交换式以太网标准研究[J].航空标准化与质量,2008,223(1):25 -28.
[2]沈青,桂卫华,杨铁军.基于工业以太网的实时控制性能分析[J].计算机工程,2007,33(1):233 -235.SHEN Qing,GUI Wei-hua,YANG Tie-jun.Real-time control performance analysis based on industrial Ethernet[J].Computer Engineering,2007,33(1):233 -235.
[3]胡凌燕,彭杰,张凤登,等.交换式工业以太网实时性实验研究[J].微计算机信息,2008,24(15):130 -131.HU Ling-yan,PENG Jie,ZHANG Feng-deng,etal.Experimental research for real-time behavior of switched industrial Ethernet[J].Microcomputer Information,2008,24(15):130-131.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
北京航空航天大学学报(2017年12期)2017-04-23
通信产业报(2017年6期)2017-03-27
通信产业报(2017年3期)2017-03-24
电子制作(2017年24期)2017-02-02
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年24期)2016-11-14
