双基地合成孔径雷达发展现状与趋势分析
2012-10-03 12:24曾涛
雷达学报 2012年4期
曾 涛
(北京理工大学信息与电子学院 北京 100081)
1 引言
双基地合成孔径雷达(Bistatic Synthetic Aperture Radar,BiSAR)系统通常是指空间中收发天线分置于不同平台的 SAR系统。与传统单基地SAR(Monostatic SAR,monoSAR)系统相比,BiSAR系统具有不可比拟的优势,例如接收机“静默”工作带来的隐蔽性好、安全性高、抗干扰能力强;可以获取目标多视角散射信息,利于目标数据融合;部署灵活,配置多变,甚至可以利用导航卫星、通信卫星系统等作为外辐射源。
上世纪70年代末,美国率先开展进行了BiSAR系统的研究工作,通过理论研究和一系列机载和星机BiSAR实验[1-4],初步解决了诸多BiSAR系统难题,并验证了BiSAR技术的可行性。然而由于技术问题和缺乏有效的成像算法,限制了上个世纪90年代后期的BiSAR研究。进入新世纪以来,随着机载和星载 SAR技术的不断进步,全球范围内掀起了BiSAR研究热潮,尤其是欧洲地区[5-12]。近10年以来,德国应用科学研究所(Forschungsgesellschaft für Angewandte Naturwissenschaften,FGAN)和德国宇航局(German Aerospace Center,DLR)陆续开展了一系列机载、星载和星-地等几何配置下的BiSAR实验,得到了非常好的实验结果[5,9]。英国各大科研机构[8,13,14],如 UCL(University College London),UoB(University of Birmingham)等大学,开展了机载、基于非雷达外辐射源等几何配置下的BiSAR实验;西班牙加泰罗尼亚理工大学[16]实现了基于干涉应用的静止接收 BiSAR 实验(SABRINA: SAR Bistatic Fixed Receiver for Interferometric Applications)。此外,意大利、法国等国家的科研机构也积极开展了BiSAR系统的科研工作[11,17,18]。与此同时,在上述 BiSAR实验的推动下,BiSAR成像算法的研究工作也逐渐深入、不断完善,如基于 Smile算子[19],LBF算子[20,21]、级数反转算子[22]等思想的成像算法。
在国内,电子科技大学[23]、北京理工大学[24,25]、中国科学院电子学研究所[26-28]等科研院所也陆续开展了机载双基地、星地双基地等几何配置的BiSAR实验和成像算法、干涉处理等方面的研究工作。
本文从BiSAR系统的实验角度入手,深入剖析BiSAR系统的发展脉络,由简单到复杂,逐步引入BiSAR系统发展中的各类难题和解决思路,试图从本质上揭示 BiSAR系统研究的内在逻辑性和科学动力。文章第2节讨论了世界范围内各个科研小组所开展的各类 BiSAR实验,从不同侧面论述了BiSAR系统和数据处理的特点;第 3节分析了BiSAR系统成像处理算法的发展脉络与趋势;第4节总结了全文。
2 BiSAR系统综述
2.1 机载BiSAR系统
机载BiSAR系统无疑是BiSAR研究工作的起点。一方面,相比于星载系统,构建机载BiSAR实验系统比较简单;另一方面,机载BiSAR系统包含了所有BiSAR系统可能面临的技术挑战,包括信号同步和数据处理等方面。因此,从机载BiSAR研究出发,逐个突破关键技术是雷达界开展BiSAR研究工作的基本思路。
1977年,美国Xonics公司的理论和仿真研究证实了BiSAR成像的可能性[1]。1979年初到1984年间,Goodyear公司、Xonics公司与美国国防部、空军等单位签订研究合同,开展一系列机载BiSAR实验并获得了BiSAR图像[1];Auterman在1984年发表的文献中首次公开提到了BiSAR实验,并公布了3幅BiSAR图像(Willow Run机场附近区域的SAR图像),这些实验结果完成了机载BiSAR成像的概念验证。
德国宇航局(DLR)和法国宇航局(ONERA)于2002年开展了欧洲最早机载X波段BiSAR实验[17],其主要目的是探讨 BiSAR系统在干涉处理中的潜力,例如降低时间去相干和大气相位的影响以提高DEM 精度。实验中的发射信号带宽为 100 MHz,实验前对各类同步问题做了详细的研究和设计,完成了BiSAR成像和干涉处理,得到初步的干涉结果(见图 1),可以看到建筑物都表现为较大高程的蓝色,图上方的高速路表现为较低高程的绿色。
2003年10月,德国FGAN利用已有的两套X波段雷达系统 AER-II和 PAMIR开展了机载BiSAR 实验[5]。该实验采用连续采集的方式进行回波记录(没有记录直达波信号),天线波束照射同步则通过事先精确地设计和飞行员高超的驾驶技巧来保证。实验采用的发射带宽为300 MHz,采集了多个双基地角条件下的场景回波信号并利用差分GPS接收机记录了发射和接收平台的轨迹历史。图2所示为所获得的BiSAR图像,成像算法采用BP算法,并且完成了运动补偿处理。与目标场景光学图片(左图)对比可见,该实验成功获取了目标场景的BiSAR图像。虽然该实验获得了大带宽和大双基地角条件下的BiSAR图像,但是文献中并没有提到频率同步的相关处理方法。
2004年,英国QinetiQ公司在国防研究局的资助下利用机载 ESR雷达作为发射机,直升机载ADAS雷达作为接收机,首次完成平飞机载聚束式的 BiSAR 实验[8],并且成功将自聚焦算法应用到BiSAR成像处理中。该实验采用天线聚束照射和高精度的铯原子钟解决了波束同步和时间同步带来的问题,而频率同步是通过地面测试的方法保证发射机和接收机的振荡器的频率和相位噪声满足BiSAR系统的实验要求。该实验的成像算法采用PFA(Polar Format Algorithm)算法和RMA(Range Migration Algorithm)算法,并且利用了简单PGA(Phase Gradient Autofocus)自聚焦处理来提高图像质量。在图3所示成像结果中,双基地角大约为50°,发射机和接收机的波束照射方向差别较大,图中左下角几棵大树的聚焦结果可以看到,这些大树存在两个阴影区域,分别对应发射机和接收机,两个阴影区域相对于大树的聚焦位置的夹角大约和双基地角相当。
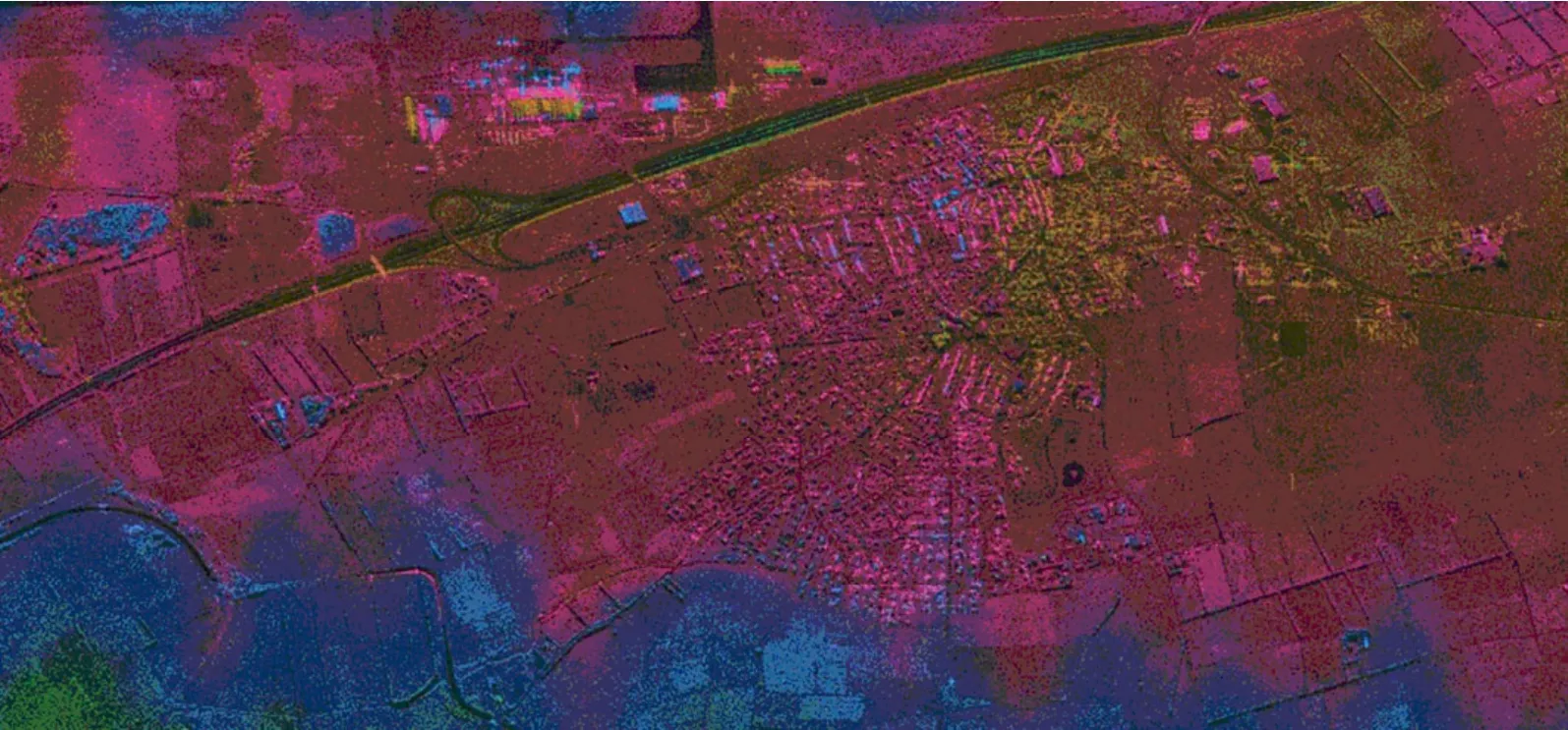
图1 机载BiSAR干涉实验结果
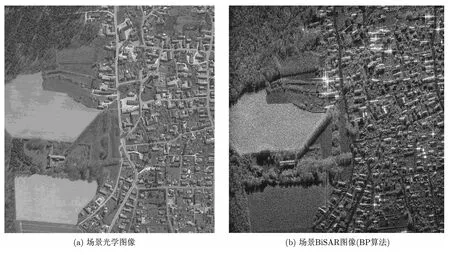
图2 FGAN开展的机载BiSAR成像结果
在国内,电子科技大学[23]的学者率先开展了BiSAR系统理论研究工作,讨论了系统的同步处理,提出修正RD成像算法和时变阶梯变换算法实现系统回波聚焦,并且于2007年3月组织了机载BiSAR飞行实验,通过实测数据的成像处理,获得了国内第1幅机载BiSAR图像(图4)。
综上所述,通过上述机载BiSAR实验的研究与验证,突破了BiSAR系统的信号同步处理以及成像处理算法等关键技术,为星载BiSAR系统的研究提供了充分的技术储备。
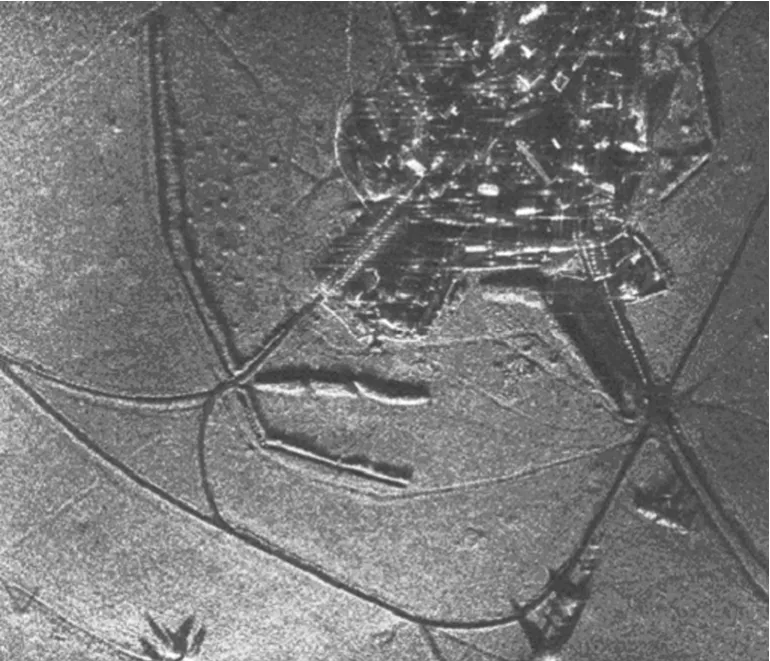
图3 BiSAR系统聚束模式成像结果
目前,随着单基地机载 SAR能力的进一步提升,如多波段、多极化、高分辨、干涉等(表1),使得单基地机载SAR在地形测绘、目标分类与识别方面的能力显著提升。通过引入双基地角度这一维度,可以实现对目标区域进行双基地多波段、双基地多极化等多维度的观测,进一步挖掘目标在双基地多维度观测下的散射机理,为目标几何结构的解译、目标分类与识别提供新的技术途径与方法。因此,基于机载多功能 SAR系统的双基地实验与处理方法研究是未来机载BiSAR的主要趋势之一。
2.2 星载BiSAR系统
2.2.1 星地BiSAR系统 星地BiSAR系统是指利用在轨SAR卫星作为发射源,地面静止接收的BiSAR系统。西班牙加泰罗尼亚理工大学的学者于2006年提出了SABRINA系统概念[16],首次将星地BiSAR系统应用到干涉和形变检测领域,并采用ENVISAT等雷达卫星作为发射机,设计了干涉BiSAR实验。发射机采集了分别位于前向散射区和后向散射区时目标场景的回波,结合相应的数据处理方法得到了较好的实验结果(图 5)。图中的左侧边缘(后向散射区)和右侧边缘(前向散射区)分别对应一座高地,因此其测得的高程较大。
北京理工大学于 2006年开始研究基于低轨SAR卫星作为发射机,静止接收的BiSAR系统数据处理[24,25.29,30],包括成像处理、干涉处理和极化合成等方向,并于 2010年开展了基于我国遥感 1号SAR雷达卫星作为发射机,静止接收的BiSAR系列实验,目标场景选择在北京市良乡地区,记录了发射机直达波信号用作同步处理,数据采集方法为连续采集,成功实现了双极化数据和干涉数据的采集。实验中,遥感1号雷达卫星的天线照射存在小前斜角,因此采用修正NCS算法进行成像处理,并利用自聚焦处理进一步提高成像质量,图6所示为场景区域的光学图和BiSAR图像,可见聚焦效果良好。
通过进一步的对干涉数据进行处理,得到目标区域DEM结果如图7所示。可以看到,由于实验中天线较为指向南方,南方回波较强;楼房比周围区域高40~45 m,实际测量中楼房高14层,每层3 m,与测量结果相符;城铁站比周围区域高12~18 m,实际测量城铁站比周围平地高16 m,与测量结果基本相符。
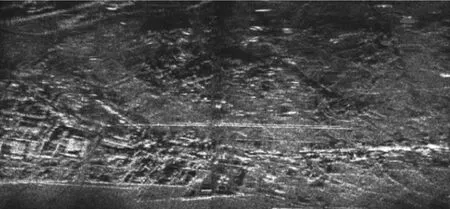
图4 国内第1幅机载BiSAR实验图像
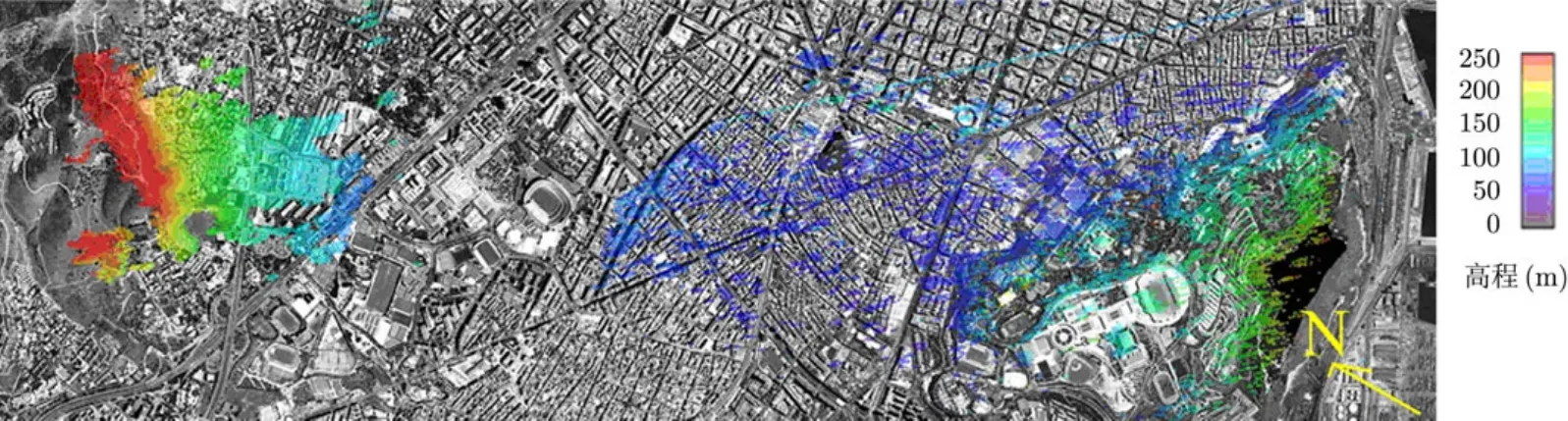
图5 SABRINA系统的实验结果

图6 星地BiSAR实验图像
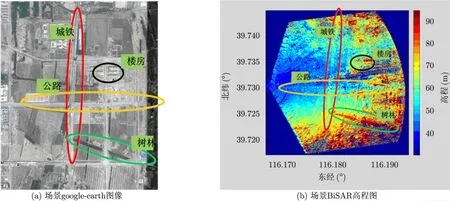
图7 星地BiSAR干涉实验结果
此外,中国科学院电子学研究所利用国内的遥感卫星也开展了相关的星地双基地干涉实验,但相关处理结果尚未见发表。
2.2.2 星机BiSAR系统 最初的星机BiSAR研究工作于 1984年在美国完成[2-4]。1984年 10月,由美国“挑战者”号航天飞机搭载SIR-B成像雷达与型号为CV-990的飞机上搭载的一部L波段雷达共同构成了一套双基地雷达实验系统,其中,飞机上搭载的两幅天线分别用于接收回波以及发射机的直达波。该实验成功获取了目标区域BiSAR成像结果,验证了直达波信号可以应用于同步处理,但是其分辨率并没有达到预计要求。此后,90年代中期,美国空军研究实验室(AFRL)和喷气推进实验室(JPL)进行了星机 BiSAR实验,发射机采用欧洲航天局(ESA) ERS-1 和美国 SIR-C 两颗单基地 SAR 卫星,接收机安置在美国国家航空航天局(NASA)的DC-8飞机上。在航天飞机发射之前,利用 ERS-1卫星做了实验,并给出了一幅由ERS-1作发射机获得的阿拉斯加地区的BiSAR图像,系统频率同步通过接收卫星直达波与其地面回波共同完成,第1次验证了星机BiSAR的可行性,从而催生了一种新的BiSAR 成像体制。
TerraSAR-X星载SAR平台于2007年7月升空,是最先进的全新一代X波段星载SAR系统,利用TerraSAR-X作为发射机开展了一系列BiSAR实验,获得了非常好的结果,极大地推动了BiSAR系统的研究工作。2007年11月,德国宇航局(DLR)开展了以TerraSAR-X作为发射机,F-SAR机载雷达作为接收机的星机BiSAR实验[12],其中,两个平台平行飞行并采用双通道连续采集的方法实现数据的采集。该实验利用了场景中布置的3个X波段的应答器用作后续的定标和同步处理,结合了直达波和参考点目标完成了频率同步处理,成像处理算法采用了双基地 BP算法进行成像处理,成像结果如图8所示。通过应答器响应的2维分辨率分析,结果显示系统聚焦结果非常好,分辨率和理论设计完全吻合。该成像结果是公开发表的第1幅聚焦良好的星机BiSAR聚焦结果,并且发射带宽达到了100 MHz,实现了地表目标的高分辨。
2008年底和2009年初,德国夫琅和费高频物理和雷达技术研究所(Fraunhofer Institute for High Frequency Physics and Radar Techniques,FHR),联合传感器系统中心(the Center for Sensorsystems,ZESS)和锡根大学(University of Siegen)开展了以TerraSAR-X作为外辐射源,PAMIR (Phased Array Multifunctional Imaging Radar)机载雷达系统作为接收机的系列BiSAR实验[9],将星机BiSAR系统的研究推到了新的高度。该实验的突出特点是同时提出并实现了星机天线的双滑动聚束照射模式进行数据采集,从而得到了方位向宽幅场景成像结果,同时分析了BiSAR图像和monoSAR图像的特点,得到了令人振奋的结果。在 2008年的第 1次星机BiSAR实验中,收发平台以近平行轨迹同向飞行,TerraSAR-X照射方式为滑动聚束模式,照射范围可以达到 5 km×10 km,PAMIR照射方式为经典条带模式,但是其方位向天线采用子阵照射模式(1/3全阵列),波束宽度大约为6°,目的在于得到较宽的方位向场景覆盖范围,发射带宽为150 MHz。在2009年初开展的第2次星机BiSAR实验中,收发平台同样采用近平行轨迹同向飞行,TerraSAR-X照射方式为滑动聚束模式,PAMIR照射方式为全孔径照射,波束宽度为2.5°,采用逆滑动聚束模式(即波足移动速度大于飞机平台本身的速度),采集到更宽的方位向场景回波;同时发射带宽增加到 300 MHz。
图9所示为实验1的成像结果,成像范围为4 km×1.4 km,其中图9(a)表示利用双基地BP成像算法得到的聚焦结果;图 9(b)表示利用频域成像算法-扩展 Loffeld双基地公式(Extended Loffeld’s Bistatic Formula,ELBF)进行聚焦处理得到的成像结果;图 9(c)表示场景的光学图像。可以看到,三者的吻合度非常高,表明了系统和数据处理算法的可靠性。
图10所示为实验 2的成像结果,成像范围为5.4 km×1.6 km,相比于实验1的场景范围较大,聚焦处理采用双基地 BP成像算法。可以看到,利用逆滑动聚束模式可以获得较宽的方位向场景范围,并且保证了距离向幅宽。
分析BiSAR和monoSAR图像间的透视收缩和叠掩效应可以观察到非常有趣的现象,实验结果如图11所示。图11(a)所示为PAMIR单基地SAR图像;图11(b)表示PAMIR图像(红色)和双基地图像(绿色)的彩色合成图,可以看到建筑的顶部出现绿色,这说明它们在双基地图像中的聚焦位置更加靠前,即两者中目标双基地投影较长;图 11(c)表示TerraSAR-X图像(红色)和双基地图像(绿色)的采样合成图,可以看到建筑的顶部出现红色,这说明它们在双基地图像中的聚焦位置比较靠后,即两者中目标双基地投影较短;图11(d)表示TerraSAR-X图像(红色)和PAMIR图像(绿色)的采样合成图,可以看到建筑的顶部出现红色,这说明它们在TerraSAR-X图像中的聚焦位置比较靠前,即两者中目标TerraSAR-X投影较长。
2009年 11月,德国 FHR机构开展了以TerraSAR-X为发射机,PAMIR作为接收机的前视BiSAR实验[31],在实验中,发射机工作于滑动聚束模式,照射的目标场景范围大约为5 km×10 km,时间大约为3 s。接收机包括雷达波和直达波天线,直达波天线位于飞机顶部,数据采集方法采用基于脉冲同步的方法,该实验第1次实现了前视BiSAR系统的成像处理,为基于BiSAR系统的飞机盲降应用做好了准备工作。
成像处理算法采用双基地BP算法,图12所示为前视BiSAR实验成像结果,可以看到,成像结果中包括了机场、村庄和自然场景,聚焦效果较好。
2.2.3 星载BiSAR系统 随着2010年7月德国第2颗X波段星载雷达卫星的升空,即TerraSAR-X的复制卫星,TanDEM-X系统(以下记首颗TerraSAR-X卫星为TSX,第2颗为TDX)终于完成部署,为后续一系列如星载 BiSAR、干涉 SAR等研究做好准备。德国宇航局(DLR)于2010年8月开展了基于TanDEM-X系统的星载BiSAR实验[10],两颗雷达卫星处于前后跟随模式,但是存在很小跨轨基线,实验时,前方TSX处于小后斜视照射模式,跟随TDX则处于小前斜视照射模式;此外,整个实验不仅包含了成像实验也包括了干涉实验,而且成功获取了目标场景BiSAR图像和干涉结果,表明星载BiSAR实验和数据处理的良好性能,充分验证了星载BiSAR系统的可行性。

图10 星机BiSAR系统(TerraSAR-X/PAMIR)实验2成像结果(BP算法)
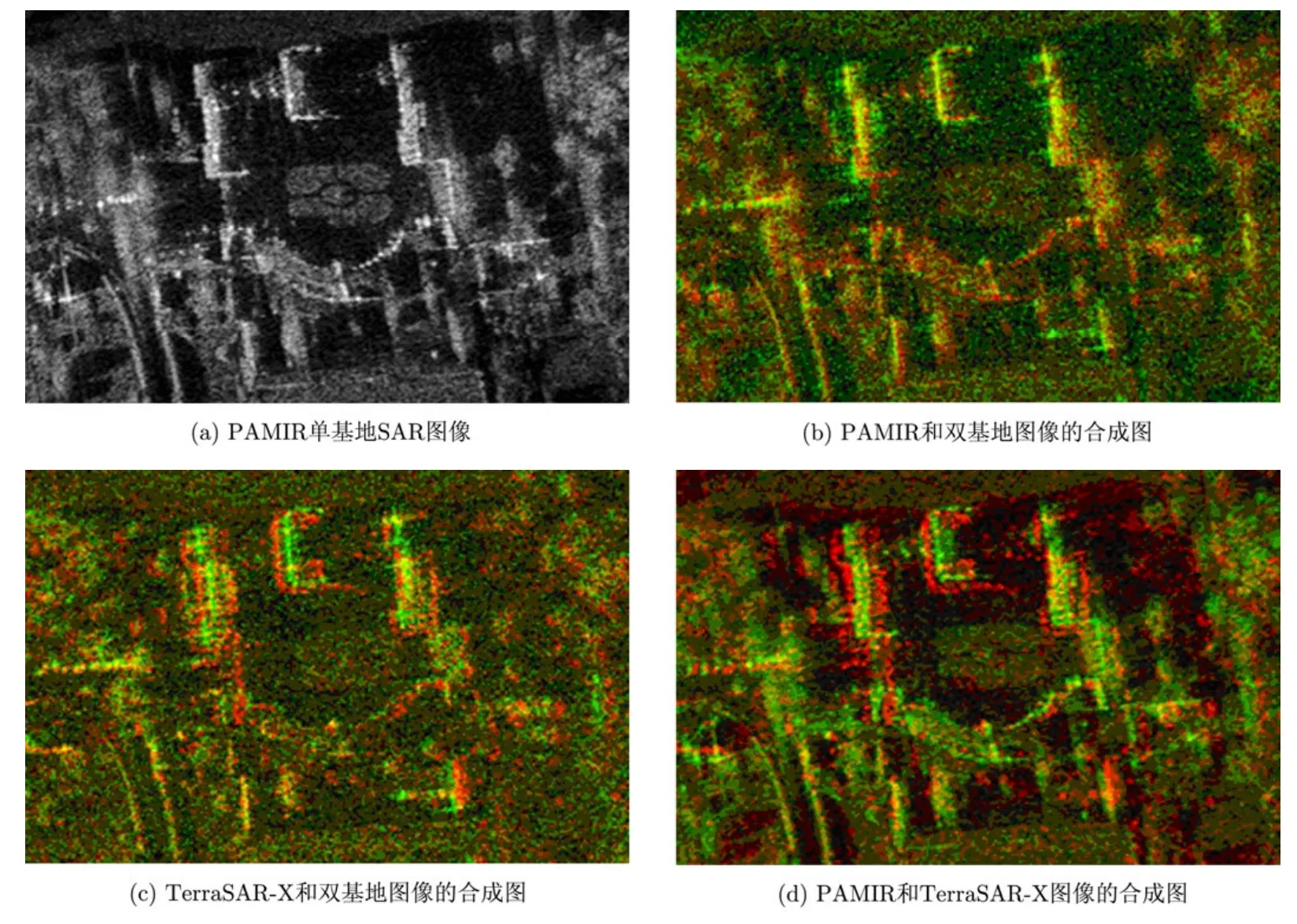
图11 SAR图像的投影缩短和叠掩效应比较

图12 星机前视BiSAR系统(TerraSAR-X/PAMIR)成像结果
在成像实验中,TSX天线照射模式为后斜视0.8°,发射和接收雷达波,TDX天线的照射模式为前斜视0.8°,工作于接收雷达波模式,同步信号通过TDX上搭载的直达链路(SyncLink)采集信号,从而获取时钟偏差等信息。经过上述的数据采集模式,实验采集到的数据包括一组后斜视模式的单基地SAR回波数据和一组等效正侧视模式的BiSAR回波数据,两者数据在多普勒频域不存在频谱重叠,这意味着两组数据不能用于干涉处理,因此这时干涉数据获取只能依赖双航过的方法采集。图13表示BiSAR实测数据的成像结果,成像场景位于南美洲巴西首府-巴西利亚,从图像中心可以看到类似飞机造型的城市特点,图中黄色部分对应城区场景,白色部分对应自然场景。

图13 星载BiSAR系统(TanDEM-X)成像结果
为了更好的分析BiSAR图像的特点,图14给出了单基地图像和BiSAR图像的比较图,其中绿色部分表示BiSAR图像,粉色表示monoSAR图像。从图14中可以明显地观察到两处不同点。首先,在城市中心单基地散射远强于双基地散射,但在湖畔区,双基地散射明显增强,该特点说明即使对于非常小的双基地角(该实验中为1.6°),目标的散射特性也可以发生非常明显的变化,因而会对SAR目标分类带来好处。其次,从图14中右下角可以看出,湖面区存在场景中某强散射中心的模糊成像结果,并且单双基地模糊的距离向位置出现偏差,这是因为双基地模式此时处于等效正侧照射,而单基地处于斜视模式。因此,利用该特点可以反解模糊信号的位置,从而对SAR图像解模糊带来新的思路。
完成上述BiSAR成像实验后,2010年10月在波多黎各的 Parque Nacionaldel Volcan Turrialba作为目标场景开展了单航过干涉实验,该目标场景为典型缓慢起伏的山地地区,适合 DEM 获取。该实验采用基于脉冲间调整的方法进行数据获取,即第1个脉冲,两个雷达系统均工作于正侧模式获取数据,紧接着的第2个脉冲,TSX天线以后斜视0.9°的方式发射脉冲,TDX天线以前斜0.9°的方式接收数据,这样所获得的单基地数据和双基地数据都是工作于正侧视模式,多普勒频域存在信号重叠,可以用于干涉处理。总体而言,该工作流程可以获得一组单基地干涉数据和两组双基地干涉数据。但是该实验中的数据采集方式会带来如下不利之处:首先PRF需要加倍,意味着距离向幅宽减半;其次,上述数据采集方法导致无法采集收发同步数据。图15所示为得到的结果,经过和TSX多航过获取得到的DEM结果相比,该结果的精度达到5 m精度,说明了该系统在单航过模式下的有效性。
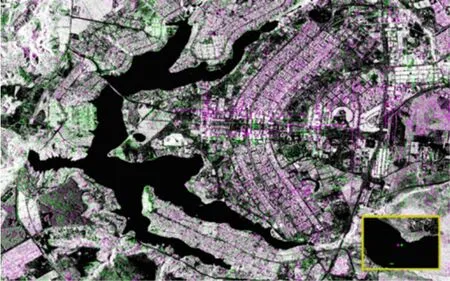
图14 星载单基地和双基地SAR图像对比
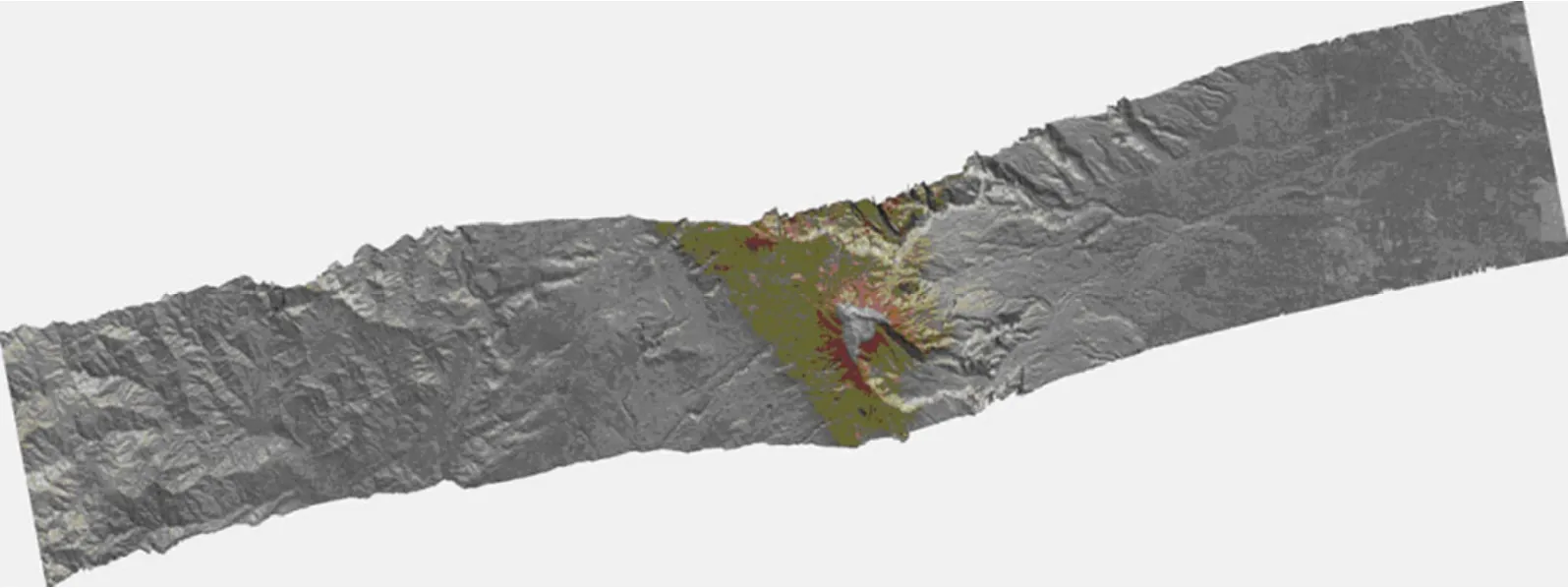
图15 星载BiSAR单航过DEM结果
星载 BiSAR系统的研究工作可以进一步扩展到星载多基地 SAR(分布式或组网)系统,这样不仅可以研究在较大双基地角模式下的目标响应,并且可以实现单航过干涉数据获取,对抑制时间去相干和大气相位等非理想源对高精度 DEM 获取的影响至关重要,可进一步提高DEM精度。
2.3 基于外辐射源的BiSAR系统
外辐射源 BiSAR系统主要是指当发射机为非雷达系统时的BiSAR系统,如基于导航卫星,通信卫星等外辐射源的BiSAR系统。
2002年,伯明翰大学MISL(Microwave Integrated Systems Laboratory)实验室和北京理工大学共同提出了 SS-BiSAR(Space-Surface BiSAR)系统概念[13,32],发射机选用在轨导航卫星,接收机位于地表附近,可以是机载平台,静止平台或者车载平台,包括至少两个接收天线,一幅用于接收直达波信号,另一幅用于接收目标场景的回波信号。由于导航卫星的设计初衷并不是作为雷达系统的外辐射源,因此该系统的突出特点是回波的低信噪比和距离向的低分辨,并且发射机斜距和接收机斜距在数值上的巨大不同也表明了该系统具有极度非对称的拓扑关系。
为了验证系统对真实场景成像的可行性,英国伯明翰大学和北京理工大学开展了一系列成像实验,包括静止接收模、车载接收、机载接收等模式。2011年3月23日开展的成像实验[33],选取发射机为GLONASS系统 Cosmos 737卫星,对应载频为1601.7325 MHz,积累时间为300 s,接收机距离主目标190 m,静止接收。整个系统布置于伯明翰大学电子电气计算机工程学院大楼的顶层,直达波天线位于雷达波天线的近处;雷达波束指向对面Muirhead大楼,该大楼为成像实验主要目标,原因在于该楼的体积很大,在面向工程学院大楼的一侧从形状上分为3个平面,最中间的一块是金属板,整个大楼的几何结构预示着可以较强地反射雷达波。
作为SAR成像处理的基本手段,BP算法可以用来初步验证SS-BiSAR系统回波的正确性。图16所示为采用 BP算法得到的成像结果,可以看到,该系统的目标响应主要对应离散的强散射点,如人造大楼等,自然场景的回波聚焦结果并不明显,说明强散射点目标的响应淹没了弱散射点目标的系统响应,这和基于外辐射源BiSAR本身的特点是符合的,即低距离分辨率和低信噪比。
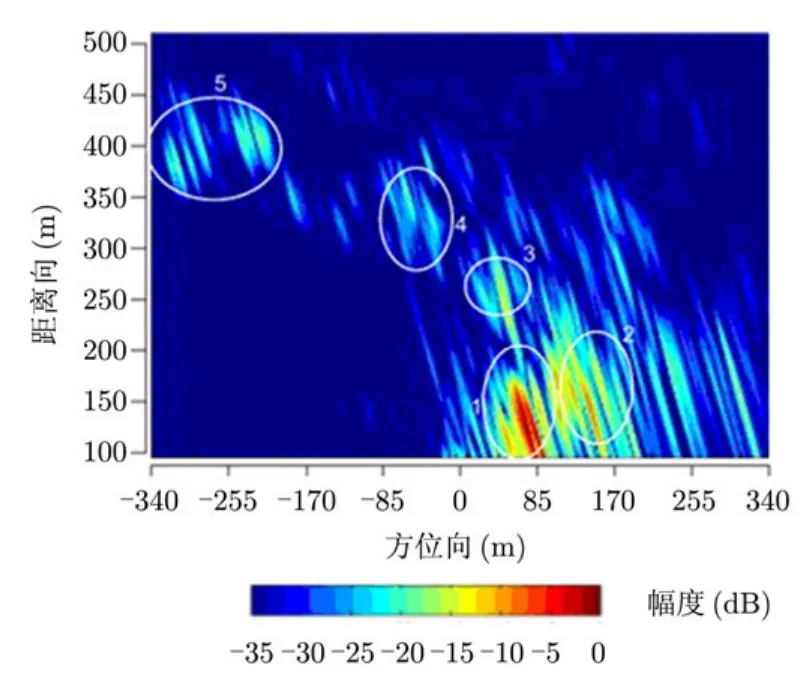
图16 BP算法的外辐射源BiSAR实验图像
典型的基于外辐射源 BiSAR系统为基于导航卫星的BiSAR系统,其突出优势在于目标区域的时空连续覆盖,从而使得系统的应用较为广泛,例如测绘、检测等;但是由于发射机为非雷达卫星,因此系统数据处理的难度非常大,主要体现在距离分辨率低和信噪比差两个方面。对于这两个问题的最终解决决定了基于导航卫星 BiSAR系统在实际生活中应用的深度和广度。
从上述不同类别的BiSAR实验历程可以看到,经过 10多年的研究,BiSAR系统的各个难题已经得到了很大程度的解决,尤其是在同步处理和成像方面,系统成熟度越来越高,特别是 TerraSAR-X星载SAR平台的升空,从更加广阔的层面提升了我们对BiSAR系统的认识。此外,对于BiSAR系统的研究已经扩展到对基于非雷达卫星 BiSAR系统的研究上,该类系统具有较好的应用前景。总之,BiSAR系统后续实验的开展应该充分借鉴已有的成熟技术,尽快实现BiSAR技术的实用化。
3 BiSAR成像处理
BiSAR系统的种种优势是以系统的复杂性大大提高为代价的,尤其是在数据处理方面。由于发射机和接收机的物理分离,发射和接收采用两套电子设备,同步处理成为首当其冲的难题[29,34-40],主要包括3方面:波束同步、时间同步和频率同步。从上述BiSAR各类实验可以看到,同步问题已经得到了一定程度的解决,例如波束同步不仅可以通过严格的波位设计来保证,并且可以利用比较复杂的波束追赶法来实现;时间同步既可以通过跟踪直达波、高精度铯原子钟、连续采集等发法直接实现,也可以采用基于数据的自适应思路处理;频率同步可以利用高精度频率源保证,但是直达波同步已经成为非常流行的处理方法。
除去同步处理之外,高效、精准的成像处理是BiSAR系统实现的另一大难题,其困难主要来源于两方面。首先,目标的斜距历史是目标到发射机与到接收机的斜距之和,是一个双根号表达式,如果将驻定相位原理应用到系统多普勒频谱相位的求解中,则得不到驻点的解析表达式,从而得不到解析的回波频域表达式。其次,发射机与接收机位于不同运动平台,导致目标场景内不同位置目标回波聚焦参数的变化非常严重,即聚焦参数随目标位置空变,这里的空变性一般表现为2维空变,即不仅不同距离门内的方位向聚焦处理需要不同的多普勒参数,同一距离门内的聚焦处理也需要不同的多普勒参数。对于 BiSAR系统成像处理,德国的 Ender教授[41]提出将其分为5个阶段解决的思路,从易到难分别为:单基地模式、跟随模式(Tandem case)、空不变模式(Translational Invariant case)、等速模式(Constant Velocity case)和一般轨迹模式(General case)。经过10多年的研究工作,对上述5个阶段已经提出了不同的 BiSAR 成像算法[41-60]进行解决。
单基地SAR成像算法的研究工作不需赘述。对于Tandem模式的解决方法为SMILE处理[19,43]。其基本思路是:首先利用短时处理-SMILE算子将BiSAR回波数据转化为单基地SAR模型下的数据,然后采用单基地的成像算法进行聚焦处理。但该算法只适应于Tandem模式的BiSAR系统的成像处理,由于实际条件下,发射机与接收机很难保证前后航迹一致,并且基线不变,因此该算法的输入条件非常苛刻。
对于BiSAR系统TI模式成像处理的研究比较多。Ender在文献[41,42,44]利用对目标位置的变换,使得 BiSAR系统回波频谱相位可以表示为频域测量参量的线性函数,然后采用变量变换的方法实现回波频谱重采样而完成聚焦处理。该算法的突出优点在于得到了BiSAR回波频谱的相位的解析表达式,但是其变量变换公式中含有目标的位置信息使得该变换只能完成参考点附近的小范围的聚焦处理,并且聚焦参数的求解需要采用数值计算方法。该处理算法已经成功应用到机载 BiSAR成像处理中(图17)。西电的学者在文献[49]中提出了 BiRMA 成像算法实现TI模式下的回波聚焦处理,通过提出半双基地角和双基地斜距和的概念得到了系统回波的频谱解析表达式。
BiSAR系统CV模式是指发射机和接收机各自的速度矢量在回波接收过程中保持不变,但是大小可以不同。LBF给出了该模式的成像处理方法。文献[20,21]利用三次驻定相位原理,将时域回波转换到频域,然后进行聚焦处理。如前所述,由于双根号的斜距模型的存在,使得利用驻定相位原理不能获取BiSAR系统的斜距模型的解析驻点,但是如果将驻点分为发射机相关和接收机相关的两个部分,分别利用驻定相位原理获取对应的发射机和接收机对应的频谱,最后再利用一次驻定相位原理,得到双基地畸变项对应的频谱,进而完整的BiSAR系统回波频谱表达式。基于LBF得到回波2维频谱表达式后,文献[46]采用修正 CS成像处理,提出了BiSAR系统的聚焦方法;文献[21,47]采用变量替换的方法实现BiSAR系统的聚焦,而且该处理思路已经成功应用到星机BiSAR系统的成像处理中,获得了聚焦良好的雷达图像(图9b)。
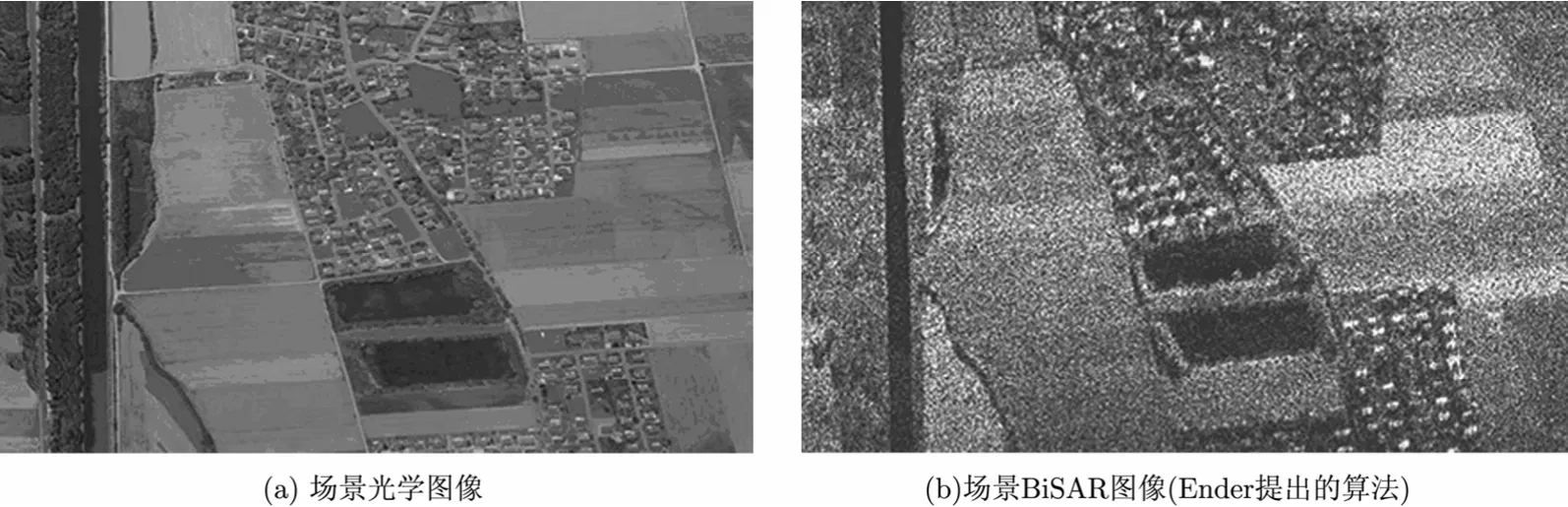
图17 机载BiSAR成像实验结果
对于一般模式的 BiSAR系统成像处理,文献[22,48,57]基于级数反转思想的思路,通过给出了精度无穷高BiSAR系统点目标回波的2维解析频谱表达式,提出了BiSAR成像处理算法。考虑到级数反转的思想和BiSAR系统的拓扑关系无关,基于级数反转思想可以获得所有 BiSAR系统的点目标回波的2维解析频谱表达式,从而解决了BiSAR系统成像处理的解析频谱获取的难题。然而,当上述处理方法应用到大场景的回波聚焦时,其处理能力会下降。当然,时域BP算法[50-52],基于泰勒级数的近似算法[51,56,59],基于数值方法抽取聚焦参数然后成像(Numeric SAR,NuSAR)[60]等都可以用来实现BiSAR系统一般模式下的成像处理。虽然BP算法已经成功应用在多组BiSAR实验数据处理中,上述算法都存在效率和精度不高的问题。
综上所述,虽然处理效率低下,BP算法仍然是目前在BiSAR实验数据处理中应用最广泛的成像算法;基于级数反转的算法可以得到一般BiSAR模式回波的解析频谱,但是其表达式极其复杂;并且现有成像算法对聚焦参数空变性的处理均存在局限性,如何给出一个高效,精确和适应性强的BiSAR成像处理算法仍旧是雷达科技人员的一个研究热点。
4 结束语
随着各类对地观测需求的不断增加,对新一代SAR系统提出了更高的要求,包括多视角观测、抗干扰性能和在强打击条件下的生存能力等。BiSAR系统可以满足上述需求,这正是BiSAR系统研究在最近10多年来快速发展的内在原因。
国外关于 BiSAR系统的研究已经非常深入,并且研制出性能良好的 BiSAR实验系统,获得了非常理想的结果。但是随着单基地机载和星载SAR功能的增强,如多波段、多极化、高分辨等,使得未来基于双基地的多波段、多极化、高分辨等多维度融合下的 BiSAR实验、数据处理与分析及图像解译等将成为主要研究热点,并将进一步推动BiSAR的发展。
[1]杨振起,夏惠诚,姚景顺.国外双基地雷达发展应用概况[J].现代雷达,1986,2(1): 46-53.
[2]Gabriel A K and Goldstein R M.Bistatic images from SIR-B[C].Proceedings of Internafional Geoscience and Remote Sensing Symposium(IGARSS),Amherst,USA,1985:1-12.
[3]Goldstein R,Rosen P,and Werner C.ERS-l bistatic radar images [C].Proceedings of International Geoseience and Remote Sensing Symposium(IGARSS),Pasadena,USA,1994:1-5.
[4]Martimek D and Goldstein R.Bistatic radar experiment[C].European Conference on Synthetic Aperture Radar (EUSAR),Fdedrichshafen,Germany,1998: 31-34.
[5]Ingo Walterscheid,Joachim H G Ender,Andreas R,et al..Bistatic SAR processing and experiments[J].IEEE Transactions on Geoscience Remote Sensing,2006,44(10):2710-2717.
[6]Loffeld O,Nies H,Gebhardt U,et al..Bistatic SAR—some reflections on Rocca's smile[C].Proceedings of the Fifth European Conference on Synthetic Aperture Radar,Ulm,Germany,2004: 379-383.
[7]Ender J H G,Walterscheid I,and Brenner A R.Bistatic SAR—translational invariant processing and experimental results[J].IEE Proceedings-Radar,Sonar and Navigation,2006,153(3): 177-183.
[8]Yates G,Home A M,Blake A P,et al..Bistatic SAR image formation[J].IEE Proceedings-Radar,Sonar and Navigation,2006,153(3): 208-213.
[9]Walterscheid I,Espeter T,Brenner A R,et al..Bistatic SAR experiments with PAMIR and terraSAR-X—setup,processing,and image results[J].IEEE Transactions on Geoscience Remote Sensing,2010,48(8): 3268-3279.
[10]Rodriguez-Cassola M,Prats P,Schulze D,et al..First bistatic spaceborne SAR experiments with tanDEM-X[J].IEEE Geoscience Remote Sensing Letters,2012,9(1): 33-37.
[11]Jesus Sanz-Marcos,Jordi J Mallorqui,et al..First ENVISAT and ERS-2 parasitic bistatic fixed receiver SAR images processed with the subaperture range-Doppler algorithm[C].IEEE International Geoscience and Remote Sensing Symposium,Aug.2006: 1840-1843.
[12]Rodriguez-Cassola M,Baumgartner S V,Krieger G,et al..Bistatic terraSAR-X/F-SAR spaceborne—airborne SAR experiment: description,data processing,and results[J].IEEE Transactions on Geoscience Remote Sensing,2010,48(2): 781-794.
[13]Cherniakov M.Space-surface bistatic synthetic aperture radar-prospective and problems[C].Porceedings Radar 2002 Conference,Edinburgh,UK,2002: 22-25.
[14]Whitewood A P,Baker C J,and Grif fi ths H D.Bistatic radar using a spaceborne illuminator[C].Proceedings IEE International Radar Conference,Edinburgh,UK,Oct.2007: 1-5.
[15]Saini R,Zuo R,and Cherniakov M.Signal Synchronization in SS-BSAR based on GLONASS Satellite Emission[C].Radar Systems,2007 IET International Conference on,2007: 1-5.
[16]Duque S,López-Dekker P,and Mallorqui J J.Single-pass bistatic SAR interferometry using fixed-receiver configurations:theory and experimental validation[J].IEEE Transactions on Geoscience Remote Sensing,2010,48(6): 2740-2749.
[17]Moccia A,Salzillo G,and D’Errico M,et al..Performance of spaceborne bistatic synthetic aperture radar[J].IEEE Transactions on Aerospace & Electron Systems,2005,41(4):1383-1395.
[18]Dubois-Fernandez P,Cantalloube H,Vaizan B,et al..ONERA-DLR bistatic SAR campaign: planning,dataacquisition,and fi rst analysis of bistatic scattering behaviour of natural and urban targets[J].IEE Proceedings-Radar,Sonar and Navigation,2006,153(3): 214-223.
[19]D’Aria D,Guarnieri A M,and Rocca F.Focusing bistatic synthetic aperture radar using dip move out[J].IEEE Transactions on Geoscience Remote Sensing,2004,42(7):1362-1376.
[20]Loffeld O,Nies H,Peters V,et al..Models and useful relations for bistatic SAR processing[J].IEEE Transactions on Geoscience Remote Sensing,2004,42(10): 2031-2038.
[21]Natroshvili K,Loffeld O,Nies H,et al..Focusing of general bistatic SAR configuration data with 2-D inverse scaled FFT[J].IEEE Transactions on Geoscience Remote Sensing,2006,44(10): 2718-2727.
[22]Yew Lam Neo,Wong F,and Cumming I G.A twodimensional spectrum for bistatic SAR processing using series reversion[J].IEEE Geoscience Remote Sensing Letters,2007:4(1): 93-96.
[23]Xiong Jintao,Xian Li,Huang Yulin,et al..Research on improved RD algorithm for airborne bistatic SAR and experimental data processing [C].Synthetic Aperture Radar(EUSAR),20087th European Conference on,2008: 1-4.
[24]Wang Rui,Li Feng,and Zeng Tao.Bistatic SAR experiment,processing and results in spaceborne/stationary configuration[C].IEEE 2011: 393-396.
[25]Zeng T,Wang R,Li F,et al..A modi fi ed nonlinear chirp scaling algorithm for spaceborne/stationary bistatic SAR based on series reversion[J].IEEE Transactions on Geoscience Remote Sensing,2012,DOI:10.1109/TGRS.2012.2219057.
[26]Qiu Xiaolan,Hu Donghui,and Ding Chibiao.Non-linear chirp scaling algorithm for one-stationary bistatic SAR[C].Synthetic Aperture Radar,2007.APSAR 2007,1st Asian and Pacific Conference on,Nov.5-9,2007: 111-114.
[27]Qiu Xiaolan,Hu Donghui,and Ding Chibiao.An improved NLCS algorithm with capability analysis for one-stationary BiSAR[J].IEEE Transactions on Geoscience Remote Sensing,2008,46(10): 3179-3186.
[28]仇晓兰,丁赤飚,胡东辉.双站SAR成像处理技术[M].北京:科学出版社,2010.
[29]Tian Weiming,Liu Haibo,Zeng Tao.Frequency and time synchronization error analysis based on generalized signal model for Bistatic SAR[C].Radar Conference,2009 IET International,2009: 1-4.
[30]Tian Weiming,Long Teng,Yang Jian et al..Combined analysis of time&frequency synchronization error for BiSAR[C].2011 IEEE CIE International Conference on,2011,1: 388-392.
[31]Walterscheid I,Espeter T,Klare J,et al..Potential and limitations of forward-looking bistatic SAR[C].IGARSS,2010: 216-219.
[32]Antoniou M,Cherniakov M,and Hu Cheng.Space-surface bistatic SAR image formation algorithms[J].IEEE Transactions on Geoscience Remote Sensing,2009,47(6):1827-1843.
[33]Antoniou M,Zeng Zhangfan,Liu Feifeng,et al..Experimental demonstration of passive BSAR imaging using navigation satellites and a fixed receiver[J].IEEE Geoscience Remote Sensing Letters,2012,9(3): 477-481.
[34]López-Dekker P,Mallorquí J J,Serra-Morales P,et al..Phase synchronization and doppler centroid estimation in fixed receiver Bistatic SAR systems[J].IEEE Transactions on Geoscience Remote Sensing,2008,46(11): 3459-3471.
[35]Cherniakov M,Zeng T,and Plakidis E.Analysis of space-surface interferometric bistatic radar[C].Geoscience and Remote Sensing Symposium,2003,IGARSS’03,Proceedings,2003 IEEE International,2003: 778-780.
[36]H Cheng,Zeng Tao,and Z Haibin.Bistatic synthetic aperture radar point spread function characteristic analysis[J].Journal of Beijing Institute Technology,2007,16(2): 193-196.
[37]Cherniakov M,Zeng T,Plakidis E.GALILEO Signal Based Bistatic System for Avalanche Prediction[C].IEEE 2003:784-786.
[38]He X,Zeng T,and Cherniakov M.Interference level evaluation in SS-BSAR with GNSS non-cooperative transmitter[J].Electronics Letters,2004,40(19): 1222-1224.
[39]He X,Cherniakov M,and Zeng T.Signal detectability in SSBSAR with GNSS non-cooperative transmitter[J].IEE Proceedings-Radar,Sonar and Navigation,2005,152(3):124-132.
[40]Zeng Tao,Cherniakov M,and Long Tong.Generalized approach to resolution analysis in BSAR[J].IEEE Transactions on Aerospace & Electron Systems,2005,41(2): 461-474.
[41]Ender J H G,Walterscheid I,and Brenner A R.New aspects of bistatic SAR: processing and experiments[C].IEEE IGARSS’04,2004,3: 1758-1762.
[42]Ender J H G.A step to bistatic SAR processing[C].EUSAR 2004: 1-5.
[43]Loffeld O,Nies H,Gebhardt U,et al..Bistatic SAR—some reflections on Rocca's smile[C].Proceedings Europe Conference Synthetic Aperture Radar,EUSAR’2004,Ulm,Germany,May 2004: 379-383.
[44]Ender J H G.Signal theoretical aspects of bistatic SAR[C].In Proceedings IEEE IGARSS’03,2003,3: 1438-1441.
[45]Walterscheid I,Brenner A R,and Ender J H G.Results on bistatic synthetic aperture radar[J].Electronics Letters,2004,40(19): 1224-1225.
[46]Wang R,Loffeld O,Nies H,et al..Chirp-scaling algorithm for bistatic SAR data in the constant-offset configuration[J].IEEE Transactions on Geoscience Remote Sensing,2009,47(3): 952-964.
[47]Wang R,Loffeld O,Ul-Ann Q,et al..A bistatic point target reference spectrum for general bistatic SAR processing[J].IEEE Geoscience Remote Sensing Letters,2008,5(3):517-521.
[48]Neo Y L,Wong F H,and Cumming I G.A comparison of point target spectra derived for bistatic SAR processing[J].IEEE Transactions on Geoscience Remote Sensing,2008,46(9):2481-2492.
[49]Zhang Zhenhua,Xing Mengdao,Ding Jinshan et al..Focusing parallel bistatic SAR data using the analytic transfer function in the wavenumber domain[J].IEEE Transactions onGeoscience Remote Sensing,2007,45(11): 3633-3645.
[50]Bai Xia,Sun Jinping,and Mao Shiyi.A novel approach for bistatic SAR imaging using a stationary receiver[C].ICSP2008 Proceedings,2008: 2250-2253.
[51]Yu Ding and Munson D C,Jr..A fast back projection algorithm for bistatic SAR imaging[C].Proceedings IEEE Image Processing 2002,2002: 449-452.
[52]Hu Cheng,Zeng Tao,Long Teng et al..Fast back-projection algorithm for Bistatic SAR with parallel trajectory[C].Proceedings EUSAR 2006,2006: 1-4.
[53]Xiong Jintao,Xian Li,Huang Yulin et al..Research on improved RD algorithm for airborne bistatic SAR and experimental data processing[C].Synthetic Aperture Radar(EUSAR),20087th European Conference on,2008: 1-4.
[54]Xian Li,Xiong Jintao,Huang Yulin et al..Research on airborne bistatic SAR squint imaging mode algorithm and experiment data processing[C].APSAR 2007.
[55]Xu San-yuan and Wang Jian-guo.Experimental data imaging for the airborne bistatic SAR[J].Journal of Remote Sensing,2010: 262-271.
[56]Zhong H and Liu X Z.An extended nonlinear chirp-scaling algorithm for focusing large-baseline azimuth-invariant bistatic SAR data[J].IEEE Geoscience Remote Sensing Letters,2009,6(3): 548-552.
[57]Liu Baochang,Wang Tong,Wu Qisong,et al..Bistatic SAR data focusing using an omega-K algorithm based on method of series reversion[J].IEEE Transactions on Geoscience Remote Sensing,2009,47(8): 2899-2912.
[58]Ulander L M H,Hellsten H,and Stenstrom G.Syntheticaperture radar processing using fast factorized backprojection[J].IEEE Transactions on Aerospace & Electron Systems,2003,39(3): 760-776.
[59]Eldhuset K.Spaceborne bistatic SAR processing using the EETF4 algorithm[J].IEEE Geoscience Remote Sensing Letters,2009,6(2): 194-198.
[60]Bamler R,Meyer F,and Liebhart W.Processing of bistatic SAR data from quasi-stationary configurations[J].IEEE Transactions on Geoscience Remote Sensing,2007,45(11):3350-3358.
猜你喜欢
今日农业(2022年1期)2022-06-01
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
作文小学中年级(2020年6期)2020-07-24
科技传播(2019年24期)2019-06-15
电子制作(2018年9期)2018-08-04
电子制作(2018年12期)2018-08-01
消费导刊(2018年8期)2018-05-25
军营文化天地(2018年2期)2018-04-20
意林(2011年10期)2011-05-14