
不同路面对汽车道路友好性的影响
2012-09-28 09:37:34陈皓云董福龙
赤峰学院学报·自然科学版 2012年23期
陈皓云,董福龙
(安徽科技学院 机电与车辆工程学院,安徽 凤阳 233100)
1 引言
有关车辆道路友好性即车辆对道路损伤的研究是近几年来新型的研究领域,上世纪60年代后期,随着计算机技术的逐步推广、随机振动理论的发展即对汽车基本性能研究的深入,国内外都进行了大量的有关车辆振动的模拟计算与分析,在此基础上,才开展了车辆对道路损伤的研究工作[1].本文主要从不同路面情况考虑对汽车道路友好性的影响.
2 道路友好性的影响因素
汽车对道路的破坏潜力的大小可以被定性的描述为道路友好性,破坏潜力越大,道路友好性越差.道路友好性的影响因素主要有以下几个方面:
2.1 路面状况的影响
随着路面状况变差(路面等级下降,路面不平度系数增大),道路友好性下降.这是由于:路面状况越差,车轮所承受路面不平度的激励越大,汽车车身振动就越剧烈,同时车轮与路面之间的动载荷也就越大,从而车辆对路面的损伤亦越大[6].
2.2 装载量的影响
理论道路破坏系数和绝对道路破坏系数随装载量的变化关系是随装载量的增大汽车对道路的绝对破坏增大.
2.3 悬架参数的影响
传统研究表明,悬架的刚度和阻尼值是影响行驶平顺性和道路友好性的重要参数.前后悬架的刚度、阻尼发生变化,货车的行驶平顺性和道路友好性将随之发生变化.
3 ADAMS软件简介
3.1 概述
ADAMS(Automatic Dynamic Analysis of Mechanical System)软件是美国 MDI(Mechanical Dynamics Inc.)公司开发的机械系统动力学仿真分析软件,它使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线.ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等[7].
3.2 路面谱
本文不同路面情况分别选取白噪声路面、台阶路面和坡路面三种情况进行对比仿真分析.在ADAMS中,路面谱的编制主要从场地的大小、路面的附着系数和路况情况等方面考虑.根据仿真的需要,白噪声路面模型设定长为180000mm,宽为70000mm的路面,路面的附着系数取为0.85,路面等级为B级.坡路面模型设定长为180000mm,宽为70000mm的路面,路面的附着系数取为0.85,坡度为16度,台阶路面台阶高200mm模型地面数据文件编制完成后,将其保存在工作目录中,注意其保存类型为rdf文件.
4 整车模型建立
在ADAMS建立整车模型时参考国产某型货车参数,建模时对车辆系统进行必要的简化,车辆系统主要由车身、前后悬架机构、转向机构、轮胎地面模型组成.最后在A D A M S/V i e w下建立出的满足研究需要的仿真模型如图1所示:

图1 仿真模型线框图
5 整车模型仿真
为了验证不同路面情况对道路友好性的影响,本文分别以白噪声路面、台阶路面和坡路面三种路面进行仿真.在仿真前首先要把前面建立的路面谱加载到整车模型上.
图2~图3分别为系统在三种路面,车速为60 k m/h时进行仿真分析所得悬架动行程和车轮动载荷的比较.
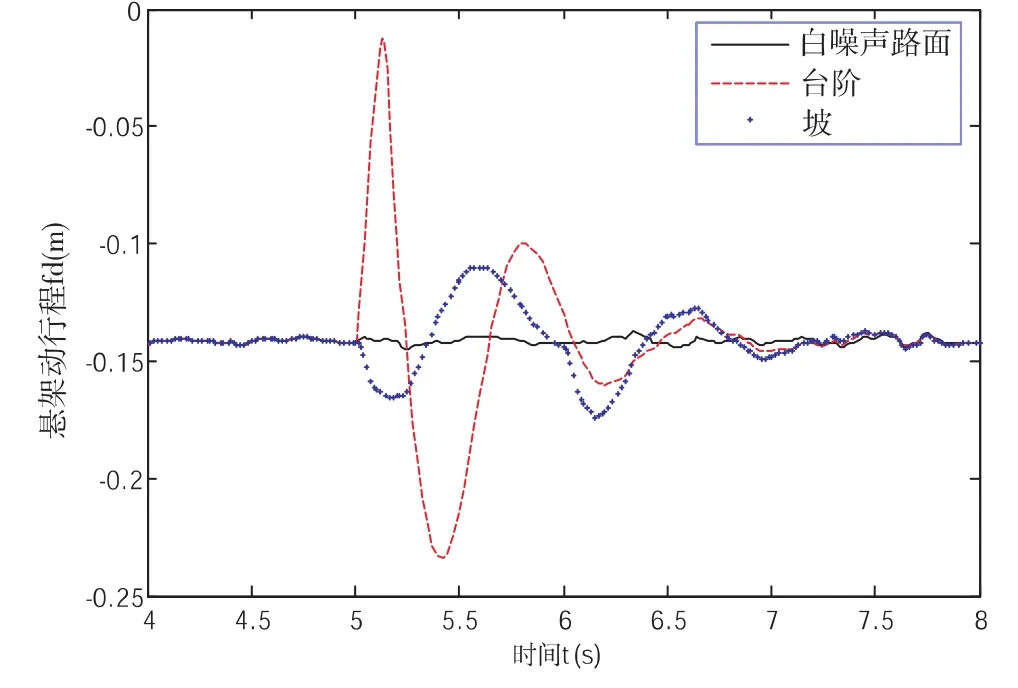
图2 悬架动行程

图3 轮胎动载荷
6 结论
通过整车仿真分析得结论如下:
(1)整车模型仿真初期、后期三种路面不管是轮胎动载荷还是悬架动行程差异不大,对汽车道路友好性的影响不大.
(2)整车模型仿真中期三种路面的轮胎动载荷和悬架动行程的变化差异较大,白噪声路面模型的道路友好性最好,台阶路面的道路友好性最差.
〔1〕周云山,于秀敏.汽车电控系统理论与设计.北京:北京理工大学出版社,1999.
〔2〕雷雨成,陈昌明.汽车平顺性与操纵稳定性优化的对策论方法.同济大学学报,1997,25(4):434~439.
〔3〕周晓文,张洪欣.一种实用的半主动悬架的控制规律研究.同济大学学报,1997,25(4):461~465.
〔4〕喻凡,郭孔辉.车辆悬架的最优自适应与自校正控制.汽车工程,1998,20(4):193~200.
〔5〕孙为群,柳玉春,陈建武.汽车空气弹簧的理论分析与试验研究.汽车科技,1999(2):1~5.
〔6〕陆正刚.铁道车辆主动、半主动空气弹簧悬挂系统的研究.铁道学报,2001,23(1):33~38.
〔7〕李军,等.ADAMS实例教程.北京:北京理工大学出版社,2002.
〔8〕王国强,张进平,马若相.虚拟样机技术及其在ADAMS上的实践.西安:西北工业大学出版社,2002.
〔9〕郑健荣.ADAMS-虚拟样机技术入门与提高.北京:机械工业出版社,2002.
〔10〕H-P 威鲁麦特[德].车辆动力学模拟及其方法.北京:北京理工大学出版社,1998.
〔11〕KatsuyaToyofuku,ChuujiYamada.Study on dynamic characteristic analysis of air spring with auxiliary chamber.JSAE Review 20(1999)349-355.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:48:08
北京汽车(2016年6期)2016-10-13 17:07:50
浙江大学学报(工学版)(2016年2期)2016-06-05 09:20:51
现代工业经济和信息化(2016年5期)2016-05-17 05:35:56
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
国外科技新书评介(2015年3期)2015-05-28 10:38:04
噪声与振动控制(2015年4期)2015-01-01 07:08:09
客车技术与研究(2014年1期)2014-03-20 14:34:48
汽车维护与修理(2014年10期)2014-02-28 12:15:00
汽车电器(2014年8期)2014-02-28 12:14:28
