Buck型变换器的线性化小信号补偿前馈控制
2012-09-25 01:51:44石安辉
通信电源技术 2012年4期
石安辉,吴 强
(泸州职业技术学院电子工程系,四川 泸州646005)
0 引 言[1-8]
DC/DC变换器是构建开关电源等许多其他类型电能变换器的核心组成部分。DC/DC变换器传统的反馈控制是按偏差调节,这使得变换器反馈系统必定是在扰动已经对输出电压产生影响,甚至出现偏差时才会产生调节作用。采用电压模式PWM控制的DC/DC变换器输入电压扰动的动态响应速度较慢,往往无法及时消除输入电压扰动对输出电压的影响,因此,在输入电压波动时,变换器输出电压幅值波动大,存在较大低频纹波。
为了克服电压模式PWM控制的DC/DC变换器反馈系统的上述缺点,并考虑到单纯反馈系统自身的局限性,本文根据开关变换器的平均变量建模思想[1],为电压型PWM控制的Buck型变换器建立了连续导电工作模式(CCM)下统一的平均变量等效电路,进而分析等效电路,并根据前馈控制的不变性原理提出了针对输入电压扰动的线性化小信号补偿前馈控制原理及实现方法。采用该方法的Buck型变换器可快速补偿输入电压扰动,加快抑制输入电压扰动的动态响应速度,显著减小输出电压中包括工频在内的低频纹波,改善变换器的动态性能。
1 Buck型变换器的平均变量等效电路
采用平均变量建模思想,用平均变量代替瞬时值变量,消除变换器中各变量的高频开关纹波分量,建立开关变换器的平均变量等效电路。平均变量的定义如式(1)。

式中,Ts是开关周期;xs(t)是x(t)的平均变量。
采用PWM开关控制,输出PWM电压波,输出端为LC滤波电路的这一类DC/DC开关变换器,统称为Buck型变换器。Buck型变换器在连续导电模式(CCM)下输出的PWM电压uD(t)及其平均变量uDs(t)的波形如图1所示。uD(t)同时也是LC滤波电路的输入电压,而uDs(t)是uD(t)的平均变量。
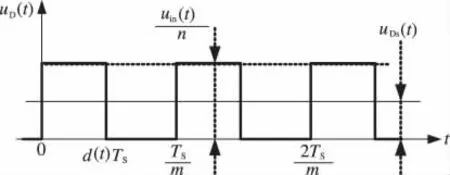
图1 PWM 电压u D(t)及平均变量u Ds(t)
表1列出了常见Buck型变换器的常数m、n及Dmax的取值。Dmax指功率开关管的最大临界工作占空比,0<d(t)<Dmax。
表1中的N1、N2分别指隔离型Buck变换器中高频变压器的原副边绕组匝数,N3则指磁复位绕组匝数。单端单管正激拓扑的Dmax随其磁复位方式的不同而不同。表1中所列单管正激拓扑的Dmax对应绕组磁复位方式。
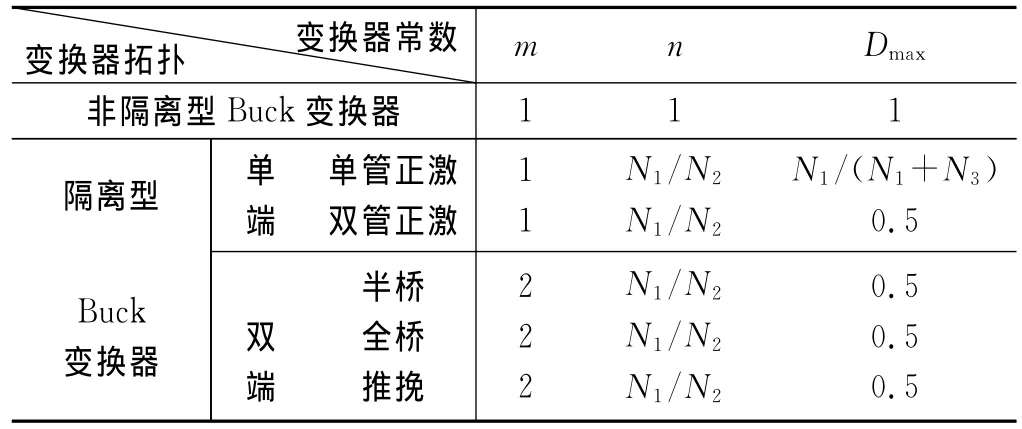
表1 Buck型变换器常数列表
如图1,在开关周期Ts这一时间尺度内,变换器的输入电压uin(t)和占空比d(t)可视为恒值常数,故由式(1)求uD(t)的平均变量,得

图2为Buck型变换器在连续导电模式下的平均变量等效电路。图中iL(t)、uo(t)分别是LC滤波电路在uDs(t)作用下的电感电流与输出电压。
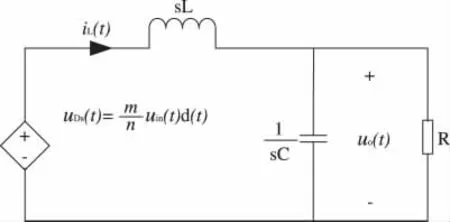
图2 Buck型变换器的平均变量等效电路
由图2可见,Buck型变换器输出电压uo(t)完全由受控电压源uDs(t)和电路初始状态决定,而受控源uDs(t)又同时受输入电压uin(t)和占空比d(t)的控制。
Buck型变换器无输入电压前馈控制时,输入电压uin(t)与占空比d(t)之间相互独立,uDs(t)随输入电压uin(t)的变化而变化,输入电压uin(t)的扰动直接影响受控源uDs(t)的大小,进而影响变换器输出电压uo(t)。
2 输入电压前馈控制的线性化小信号补偿原理
记uin(t)=Uin+(t)、uDs(t)=UDs+(t)、uo(t)=Uo+u(t)、d(t)=D+(t)。式中Uin、UDs、Uo、D分别为对应变量的直流分量(稳态分量),(t)、(t)、(t)、(t)则分别为对应变量的交流小信号分量(扰动分量),后文不再说明。
2.1 稳态分析
由图2可得

故当uDs(t)=UDs,(t)=0时,有

在式(2)中代入各变量的交直流分量,分离直流分量得

2.2 线性化小信号补偿动态分析
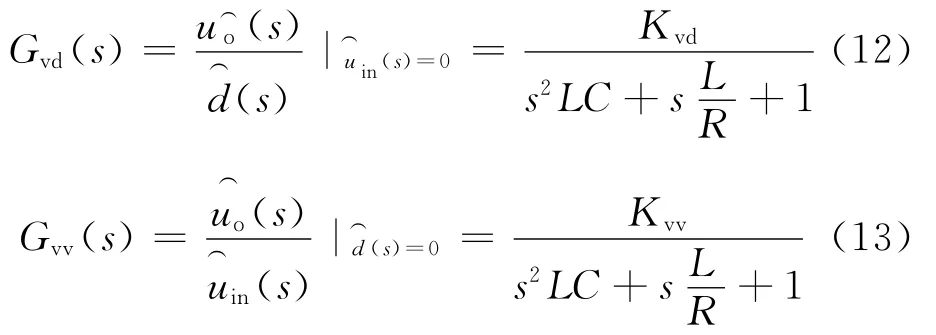
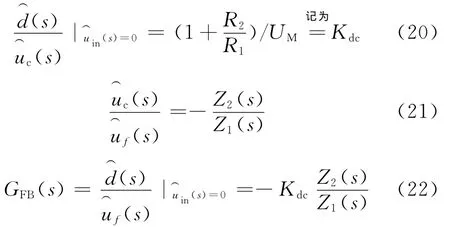
Buck型变换器的输入电压前馈控制方框图如图3所示,图中Gvv(s)、Gvd(s)分别为干扰通道与控制通道的动态小信号传递函数,GFF(s)则是输入电压前馈控制的线性化小信号补偿传递函数。
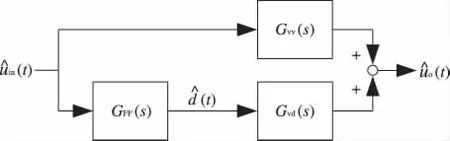
图3 线性化小信号补偿前馈控制方框图

在式(2)中代入各变量的交直流分量,分离交流小信号分量得



由式(3)、式(10)、式(11)可导出
由式(8)得输入电压前馈控制的小信号补偿传递函数

由图3知GFF(s)=(s)/(s)。因此,线性化小信号补偿的占空比动态调制函数为

根据式(15)按输入电压扰动量控制占空比的动态补偿量即可实现Buck型变换器针对输入电压扰动的线性化近似补偿前馈控制。
3 线性化小信号补偿前馈控制的实现
如图4所示,电压型脉宽调制(PWM)环节的比较器CP将调制信号ud(t)与锯齿波时钟信号相比较,输出为周期不变,脉冲宽度即占空比d(t)受ud(t)调制的脉冲信号δ(t),d⌒(t)=u⌒d(t)/UM。
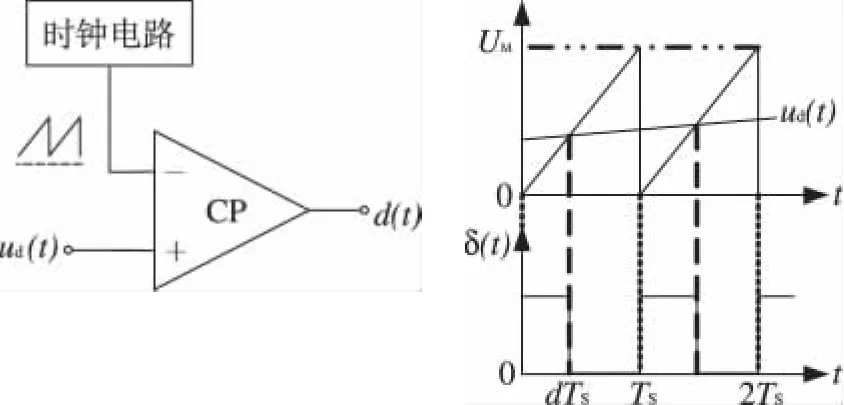
图4 电压型脉宽调制(PWM)
如图5所示,可利用简单运放电路对PWM调制信号ud(t)进行线性化小信号补偿,实现对输入电压扰动量的前馈补偿。按交直流分量记uv(t)=Uv+(t),ud(t)= UD+(t),uc(t)= Uc+(t),uref(t)=Uref+(t)。图5中,uv(t)=k1uin(t),(t)=UM(t)。
3.1 稳态参数
如图5,稳态时,ud(t)=UD,uv(t)=Uv=k1Uin,uc(t)的稳态给定值Uc为

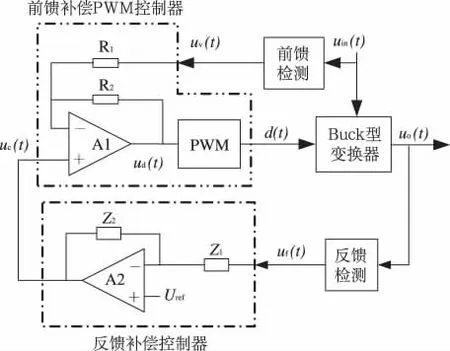
图5 Buck型变换器的前馈-反馈控制系统原理图
3.2 小信号前馈补偿的最佳条件设定

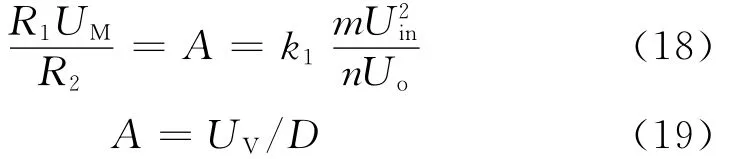
令式(17)与式(15)完全等同,由此得图5所示Buck型变换器实现输入电压线性化小信号补偿前馈控制的最佳条件方程如式(18)。
由式(18)右等式可导出式(19),因此实现线性化小信号补偿前馈控制的最佳条件是:“输入电压检测信号稳态值Uv(静态中心值)与开关管稳态工作占空比D(静态中心值)的比值正好等于前馈补偿PWM控制器的电路常数A”。
前馈补偿PWM控制器的设计步骤为:由式(19)人为设定UV与D的比值,即设定了电路常数A的取值,再按式(18)的左等式设定电路参数UM、R1、R2。
当前馈补偿PWM控制器为设计好的确定电路,即电路常数A为确定已知量时,则由式(18)的右等式设计输入电压检测电路的比例系数k1即可实现Buck型变换器针对输入电压扰动的线性化小信号补偿前馈控制。
3.3 小信号反馈环路的动态设计
图5所示Buck型变换器系统的反馈控制环路小信号方框图如图6所示。
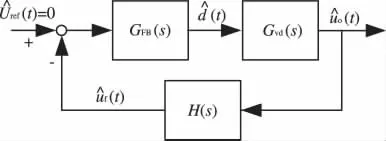
图6 反馈控制环路的小信号方框图
图6中,Gvd(s)为变换器占空比小信号(t)到输出电压小信号(t)的传递函数,如式(12);输出电压小信号反馈传递函数 H(s)=(s)/(s),一般为常数;GFB(s)为反馈补偿环节的小信号传递函数。如图5所示,有
根据反馈环路的小信号传函,采用线性系统经典的反馈补偿方法进行反馈环路的设计及参数整定。本文对此不作赘述。
4 仿真研究结果
按照本文的线性化小信号补偿前馈控制原理及实现方法,在非隔离Buck变换器上分别构建反馈控制系统和带线性化小信号前馈补偿的前馈-反馈控制系统,额定输入电压48 V,输出电压24 V,开关频率40 k Hz。利用SI Metrix软件进行仿真研究的结果如下。
图7(a)为Buck变换器反馈控制系统在输入电压uin(t)的阶跃扰动下,其输出电压uo(t)的动态响应过程。图7(b)则是采用本文所述的线性化小信号补偿前馈控制原理及实现方法的Buck变换器前馈-反馈控制系统在输入电压uin(t)阶跃扰动下,其输出电压uo(t)的动态响应过程。
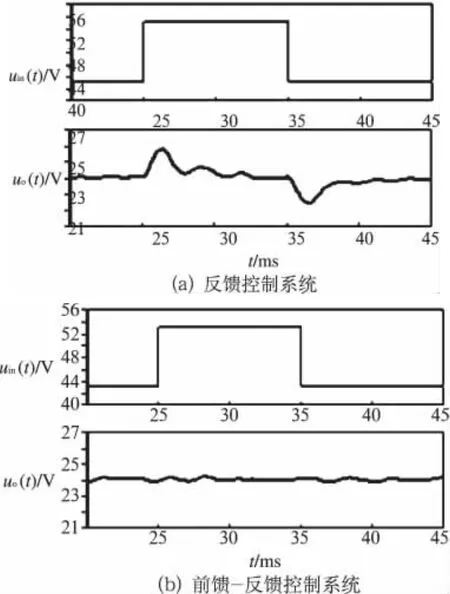
图7 输入电压阶跃扰动下的输出电压动态响应
由图7可见,与反馈控制系统相比,前馈-反馈控制系统对输入电压扰动的动态响应极快,调节过程中的输出电压动态偏差基本上被消除,动态调节时间极短。因此,引入线性化小信号补偿前馈控制的Buck变换器前馈-反馈控制系统可显著抑制输入电压扰动对输出电压的影响。
图8(a)为Buck变换器反馈控制系统在输入电压包含100 Hz大幅扰动分量时,其输出电压的低频纹波。图8(b)则是采用本文所述的线性化小信号补偿前馈控制原理及实现方法的Buck变换器前馈-反馈控制系统在输入电压包含100 Hz大幅扰动分量时,其输出电压的低频纹波。
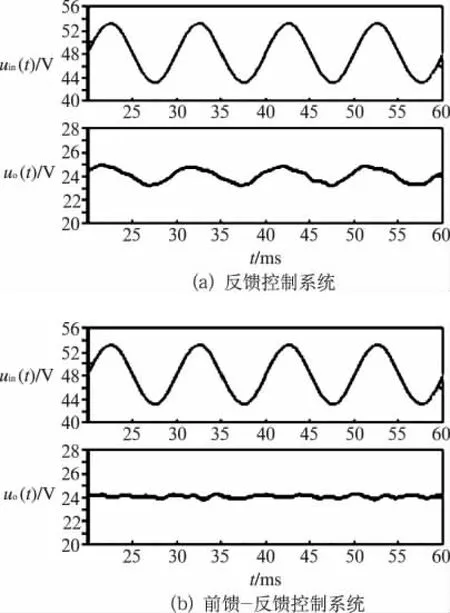
图8 输入电压大幅低频扰动下的输出电压低频纹波
由图8可见,与反馈控制相比,引入线性化小信号补偿的前馈-反馈控制可明显减小变换器输出电压中的低频纹波含量,提高变换器抗输入电压扰动的能力,改善变换器的动态性能。图7和图8的仿真实验结果均验证了本文线性化小信号补偿前馈控制原理及实现方法的正确性。
5 结 论
(1)由于开关变换器本身属于非线性时变系统,故本文所述针对输入电压扰动的线性化小信号补偿前馈控制方法属近似补偿前馈控制;考虑各种误差因素,工程上可实现Buck型DC/DC变换器对输入电压扰动的快速补偿,抑制输入扰动影响,显著减小输出电压中包括工频在内的低频纹波,改善开关变换器的动态性能。
(2)在采用传统的电压型PWM控制IC的Buck型DC/DC变换器系统中,只要输入电压便于检测,根据本文所述的前馈控制原理及实现方法对原电路稍作修改,即可引入针对输入电压扰动的线性化小信号补偿前馈控制。
[1] 张卫平.开关变换器的建模与控制[M].北京:中国电力出版社,2006.
[2] 徐德鸿.电力电子系统建模与控制[M].北京:机械工业出版社,2006.
[3] 孙 湖,刘宏亮,张国娟,等.输入电压前馈Buck变换器的研究[J].电力电子技术,2009,43(8):17-18,41.
[4] 刘 青,张东来.抑制输入扰动的Buck变换器控制方法[J].电工技术学报2011,26(4):93-99.
[5] 张国兴,吴新科,张军明,等.采用前馈控制的同步整流半桥DC/DC变流器[J].电力电子技术,2008,42(11):17-18,21.
[6] 李 乔,吴 捷.自抗扰控制及其在DC-DC变换器中的应用[J].电工技术学报,2005,20(1):83-88.
[7] 蔡宣三.开关功率变换器的控制[J].电源世界,2002,(6):56-63.
[8] 林维明,黄是鹏,张冠生,等.具有快速负载动态响应的DC/DC开关变换器控制新策略[J].中国电机工程学报,2001,21(9):78-81.
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
中等数学(2020年2期)2020-08-24 07:58:46
数学物理学报(2019年4期)2019-10-10 02:38:56
光源与照明(2019年4期)2019-05-20 09:18:18
测控技术(2018年9期)2018-11-25 07:44:24
电镀与环保(2016年3期)2017-01-20 08:15:32
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
北京航空航天大学学报(2016年7期)2016-11-16 01:50:55
光学精密工程(2016年3期)2016-11-07 09:03:32
电子器件(2015年5期)2015-12-29 08:43:41