一种改进的太阳能电池MPPT技术
2012-09-25 01:51:44任稷林祁承超章周石
通信电源技术 2012年4期
李 金,任稷林,祁承超,章周石
(1.空军预警学院研究生管理大队,湖北 武汉430019;2.空军预警学院科研部,湖北 武汉430019;3.空军预警学院信息对抗系,湖北 武汉430019)
0 引 言
随着化石能源的日益枯竭,可再生能源越来越受到人们的重视,而太阳能作为一种取之不尽用之不竭的绿色能源得到了广泛的应用。其中光伏发电技术更是具有广阔的发展前景。目前光伏发电主要面临着设备造价高,太阳能转化效率低等问题,所以提高太阳能的转换效率成为了人们的研究重点。由于光伏电池的输出电压和输出电流随着日照强度和电池结温的变化具有强烈的非线性特性,在实际的应用系统中,都希望太阳能光伏阵列在同样日照、温度条件下输出尽可能多的电能,即存在一个最大功率的跟踪[1]。目前最常用的最大功率点跟踪的方法有:固定电压法,固定电流法,扰动观察法和导纳增量法。本文分析了扰动观察法和导纳增量法的优缺点,并提出了一种自适应变步长导纳增量法的方法克服了上述两种方法的不足。
1 太阳能电池的数学模型及其特性分析
1.1 太阳能电池的数学模型
光伏极板的等效数学模型为[2]:

式中,I为极板输出电流;U 为极板输出电压;Iph为光生电流;Io为二极管饱和电流;q为电子的电荷量 (1.6×1019C);Rs为太阳能电池的串联电阻;n为二极管特性因子;k为玻耳兹曼常数 (1.38×10-23J/K);T为太阳能电池温度;Rsh为太阳能电池的并联电阻。
光伏极板的等效电路图如图1所示。
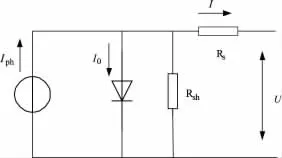
图1 光伏极板等效电路图
1.2 太阳能电池的输出特性
由数学模型及等效电路图可以得到太阳能电池在光照相同温度不同时的I-U特性曲线如图2所示。在温度相同光照强度不同时的P-U曲线如图3所示。其中S表示太阳辐射强度,T表示太阳能电池的温度。
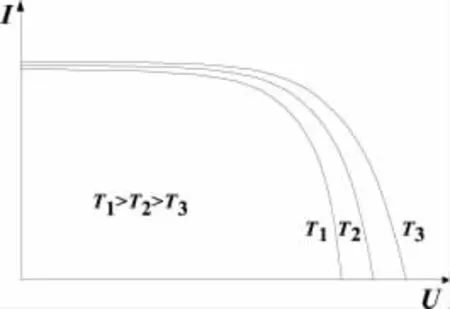
图2 在S相同T不同条件下I-U曲线
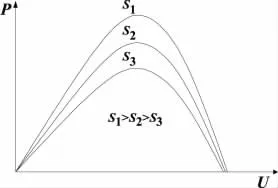
图3 在T相同S不同条件下P-U曲线
图2 为光照强度S不变,光伏电池温度T变化情况下的一组I-U曲线。从图中可以看出,光伏电池的开路电压Uoc随电池温度的上升而下降,且变化范围较大;而光伏电池的温度对短路电流Isc影响不大,随着温度的上升短路电流只是略有增加。图3为温度T相同的情况下,不同光照强度所对应的不同输出功率曲线,从图中可知在同一温度条件下输出功率与光照强度成正比。
2 太阳能电池最大功率点跟踪
2.1 原理分析
太阳能电池的电气特性如图4所示。
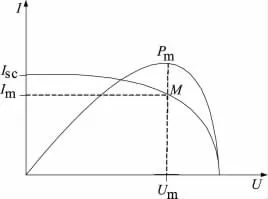
图4 太阳能电池的电气特性
由图4可以看出,太阳能电池的输出特性,I-U、I-P特性都是典型的非线性曲线,且存在一个M点使得太阳能的输出功率最大。而最大功率点跟踪的目的就是在不同的工作条件中(温度、光照强度)寻找M点使太阳能电池能时时输出最大的功率。
2.2 扰动观察法
扰动观察法的基本思想是:首先扰动光伏电池的输出电压(或电流),然后观察光伏电池输出功率的变化,根据功率的变化趋势联系改变扰动电压(或电流)方向,使光伏电池最终工作于最大功率点[3]。由图3可知太阳能电池的P-U特性曲线是一个单峰值的曲线,假设当前输出电压为U,现增加一个扰动输出电压为U+△U,然后观察功率的变化,与扰动之前比较,如果输出功率增大,则说明扰动方向正确,继续以步长△U向前扰动。如果扰动之后发现输出功率比扰动之前减小,则说明扰动方向错误,应以步长为-△U向后扰动。其工作流程图如图5所示。
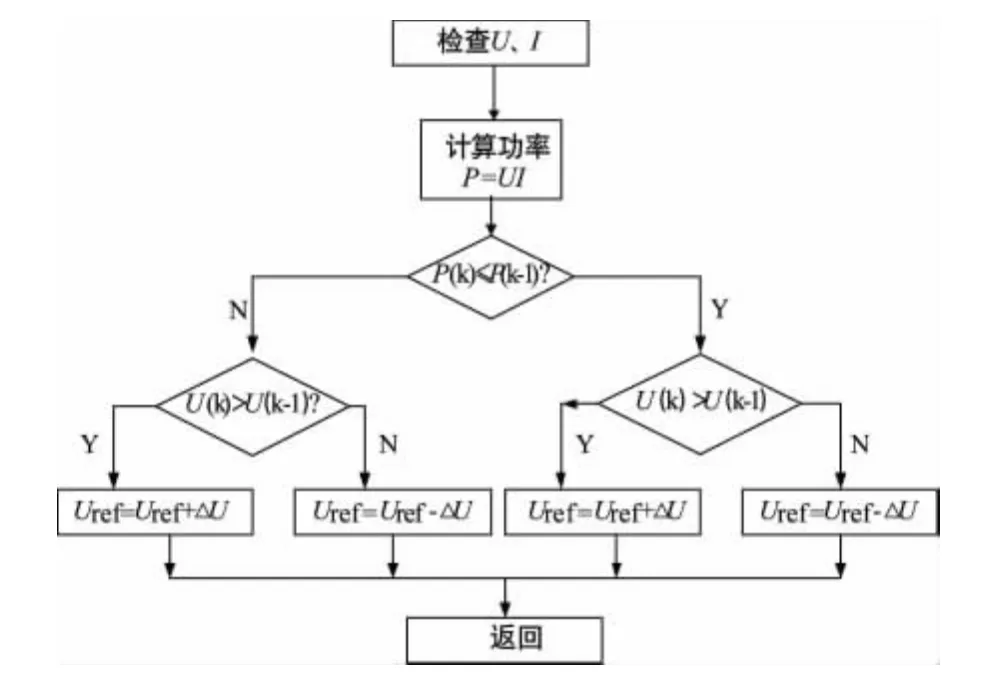
图5 扰动观察法的流程图
扰动观察法最大的优点在于结构简单,被测参数少,在实际应用当中易于实现。扰动观察法的缺点在于其没有判断系统是否已经达到最大功率点,即使系统已经工作在最大功率点,依然还会以固定步长在最大功率点附近震荡,这就造成了一部分功率的损耗。
2.3 导纳增量法
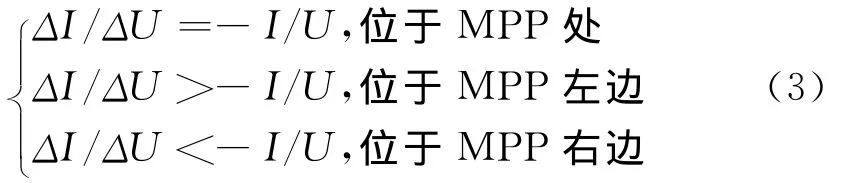
由图3可知,太阳能电池的输出P-U曲线是一个单峰值曲线,在最大功率点其斜率为零。而导纳增量法就是通过寻找这个斜率为零的点,来寻找最大功率点。
导纳增量法是根据光伏阵列的P-U曲线在最大功率点处斜率为0而得出的:

式(2)可改写为,
其具体工作过程如图6所示。
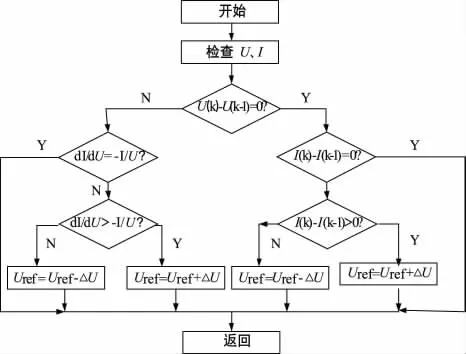
图6 导纳增量法流程图
导纳增量法控制中,步长△U决定了最大功率点跟踪的速度。较大的步长可以实现快速跟踪,但是在最大功率点附近震荡较大,而较小的步长跟踪速度较慢。这就存在一个不可避免的矛盾。因此,需要对步长进行折中选取。
2.4 自适应变步长导纳增量法
通过分析扰动观察法和导纳增量法会发现,这两种方法都需要一个固定的步长。步长选取较大,系统跟踪速度快,但在最大功率点附近震荡剧烈;步长选取较小则会造成跟踪速度较慢。这就要求对步长的选取进行折中考虑。但是在天气变化较快的地区,则不适合使用这种固定步长的方法。因此针对上述缺点本文提出了一种基于输出P-U曲线斜率的自适应变步长导纳增量法。
通过分析光伏电池的P-U曲线可以发现,在距离最大功率点较远的地方,斜率较大;在离最大功率点较近的地方,斜率逐渐减小,最大功率点处为0。图7所示为标准测试条件下的P-U,d p-U曲线[4]。
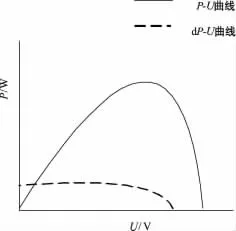
图7 标准测试条件下的P-U和d p-U曲线
从图7中可以看出P-U输出曲线的斜率一直是一个变量,因此可以根据其斜率的大小来确定步长,即步长根据斜率变化而变化的,不再是一个确定的值。令步长△U等于:

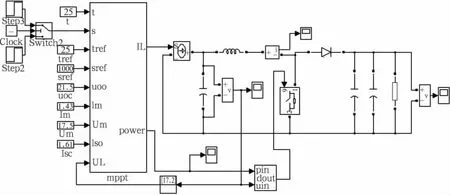
图8 系统仿真图
式中,β是一个比例系数。
基于改进的自适应变步长导纳增量法,得到Matlab/si mulink控制模块如图8所示。
设定温度为25℃,光照强度从600 W/m2突变到800 W/m2,3.5 s之后温度又突变为1 000 W/m2。其输出功率如图9所示。
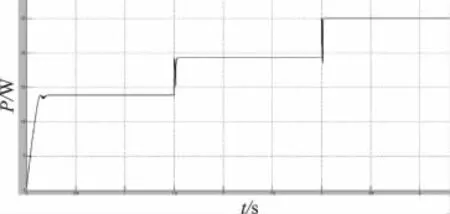
图9 输出功率
仿真结果表明,这种改进的自适应变步长导纳增量法能够快速地跟踪最大功率点,在温度发生突变的时候系统响应速度快,基本消除了系统在最大功率点附近震荡的现象,具有良好的动态性能和稳态性能。且该系统克服了固定步长造成的跟踪速度与系统在最大功率点之间震荡的矛盾。
3 结束语
本文研究分析了太阳能电池的输出特性和最大功率跟踪的几种常用的方法,并且提出了一种自适应变步长导纳增量法。该方法克服了传统固定步长的导纳增量法的不足。
[1] 江小涛,吴麟章,周明杰.太阳电池最大功率点跟踪研究[J].通信电源技术,2005,22(4):33-35.
[2] 梁希文,蔡丽娟.逆变器死区效应傅里叶分析与补偿方法[J].电力电子技术,2006,40(6):118-120.
[3] 张 兴,曹仁贤.太阳能光伏并网发电及其逆变控制[M].北京:机械工业出版社.2010.
[4] 王义飞,吴 伟,张皞华,徐 悦.改进型变步长光伏最大功率点快速跟踪[J].上海大学学报,2011,17(3):249-258.
猜你喜欢
当代陕西(2022年6期)2022-04-19 12:12:22
河北理科教学研究(2020年2期)2020-09-11 06:15:48
物理之友(2020年12期)2020-07-16 05:39:16
中学生数理化·中考版(2019年9期)2019-11-25 09:39:44
电子测试(2018年13期)2018-09-26 03:29:34
电源技术(2017年1期)2017-03-20 13:38:08
福建中学数学(2016年7期)2016-12-03 07:10:28
光学精密工程(2016年1期)2016-11-07 09:01:53
电信科学(2016年9期)2016-06-15 20:27:25
电测与仪表(2016年6期)2016-04-11 12:05:54