一种高转速水轮发电机转子动平衡的试验方法
2012-09-21 06:32:24阙广庆
大电机技术 2012年2期
阙广庆
(哈尔滨大电机研究所,哈尔滨 150040)
一种高转速水轮发电机转子动平衡的试验方法
阙广庆
(哈尔滨大电机研究所,哈尔滨 150040)
本文对高转速水轮发电机组的动平衡试验进行了研究,提出了一种比较实用的动平衡试验方法,这种方法具有仪器设备简便,启动机组次数少,平衡精度高等优点。
水轮发电机;高转速;动平衡;机械滞后角
前言
对于低转速的水轮发电机组,目前通常的动平衡方法是时-频方法。所谓时-频方法,是指采用时域分析和频域分析相结合的方法来确定不平衡力的方向和大小进行动平衡,从时域分析中的时域波形图确定不平衡力的方向,从频域分析中的频谱图中的转频分量来确定不平衡力的大小,这种方法在原理上与影响系数法相同,只是在不平衡力大小和方向的识别方法上更实用、更可靠。这种方法所需要的测试设备相对简单,具有启动机组次数少,精度高等优点。但对于高转速的水轮发电机组,现行的时-频方法存在一些问题,由于在高转速的水轮发电机组中,存在机械滞后角问题,使得现行的时-频方法平衡精度下降,有时甚至无法平衡。本文结合现场试验讨论了时-频方法和机械滞后角这两个概念,通过实例说明它们可以比较有效的解决高转速水轮发电机组转子的动平衡问题。
1 动平衡试验的基本原理
动平衡试验就是通过在转子适当部位上加重或去重的方式,调整转子质心位置,使不平衡力减小到能够满足机组稳定运行为止。引起转子不平衡的因素有很多,如转子结构不对称、原材料缺陷及制造安装误差等。转子不平衡是回转机械,特别是高速回转机械振动的主要激振力。在转动状态下,如转子的挠曲变形所产生的附加不平衡可以忽略,就称这种转子为刚性转子;相反,称柔性转子。大多数水轮发电机组的转子都属于刚性转子,可以用刚性转子的平衡方法来平衡。
影响系数法是目前刚性转子常用的平衡方法,它的基本原理如下:
假设以转子上、下两个园盘平面为加重的平衡面进行转子的动平衡,需要测量上机架、下机架的振动。平衡的步骤如下:
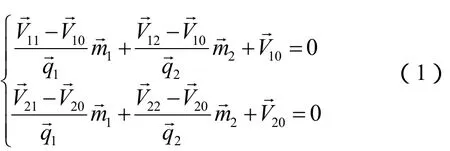
方程组(1)中各量均为矢量,解此矢量方程组即得到上、下两个平面应加的平衡块的大小和方位。
当以转子上、下两个园盘平面中的一个面或某一固定平面为加重的平衡面进行转子动平衡时,则只需测量上机架或下机架的振动。方程组(1)变为一个方程。不加试重时,测得的上机架振动矢量为,在转子某设平在面试加试重,测得加试重后的上机架振动矢量为,设在试重平面应加的平衡重为,则

式(2)中各量均为矢量,解此矢量式即得到平衡面应加的平衡块的大小和方位。
2 机械滞后角的基本概念
对于旋转的单圆盘转子,当考虑外阻力的作用时,其不平衡质量响应方程为:

式中:Ω——圆盘角速度;
ωn——临界转速;
e——偏心距;
c——阻尼系数。
由此解出振幅A和相位tanθ:
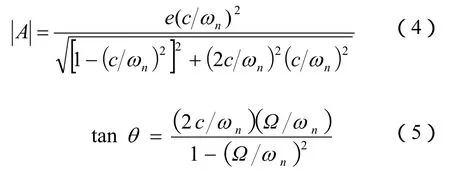
由式(4)和(5)可知振动幅值和不平衡力的相位并不一致,当Ωnω时,0≈θ,所以对于低转速的水轮发电机组可以不考虑机械滞后角θ的影响,但当Ω比较大时,就需要考虑θ的影响,高转速的水轮发电机组就存在这个问题。
3 高转速水轮发电机转子动平衡试验
我们以单面平衡为例对本文的方法说明如下:
由于水轮发电机多为立式机组,转速低,转轴与轴承间隙达300μm左右,间隙对轴振影响较大,所以通常以上机架振动或下机架振动为平衡对象,以上下导轴承的摆度值为参考。这里以上机架振动为平衡对象,为了相位的一致,所有测试传感器都用涡流传感器,测试上机架振动的涡流传感器固定在厂房内的吊车吊钩上,再把吊钩吊在离上机架较近的地方,这样测得的是上机架相对于吊钩的振动,由于吊钩受机组振动影响较小,所以这样测得的上机架振动非常接近于绝对振动。
不平衡方向的确定:假设转子旋转方向为顺时针,初始不平衡质量为,方向我们还不知道,第一次起机可测得上机架振动的幅值和相位,由于是高转速机组,这个相位与不平衡质量的相位并不一致,而是落后θ角,这个角度一般不会很大;在的对面加试重,第二次起机可测得上机架振动的幅值和相位,上机架振动是由不平衡质量和试重共同作用引起的,作矢量运算,其相当于仅由试重引起的振动,-与之间的夹角就是机械滞后角θ,将顺时针转θ角,这个位置就是不平衡质量的相位,在其对面加配重就可平衡转子。
不平衡配重值的确定:先计算灵敏度系数为:
下面是某高水头高转速冲击式水轮发电机组动平衡实例。
电站基本参数如下:
水轮机型式:冲击式
机组布置:立轴/悬式
导轴承数目:3
额定转速:750 r/min
设计水头:816 m
机组出力:22.5MW
实验的主要设备及参数如下:
涡流传感器:Bently涡流位移传感器,灵敏度8000mv/mm,最大量程2mm,频响0-1kHz;
信号分析仪:OR36动态信号分析仪。
测点位置如下:
(1)在机组+X方向用Bently涡流位移传感器测量上机架径向振动。
(2)在机组+X方向用Bently涡流位移传感器测量上、下导摆度。
(3)在上导上方的轴上贴一块薄铁片作为相位基准,转子支架共有8个支臂,鉴相片位置在1号支臂和8号支臂之间,机组顺时针旋转,沿转动方向给转子支架编号。
(4)振动、摆度与相位信号分别接入OR36动态信号分析仪。在稳定实验工况下作记录分析。
平衡过程如下:
(1)机组在额定转速下空转运行,测量转子的初始振动;
平衡过程振摆数据见表1。
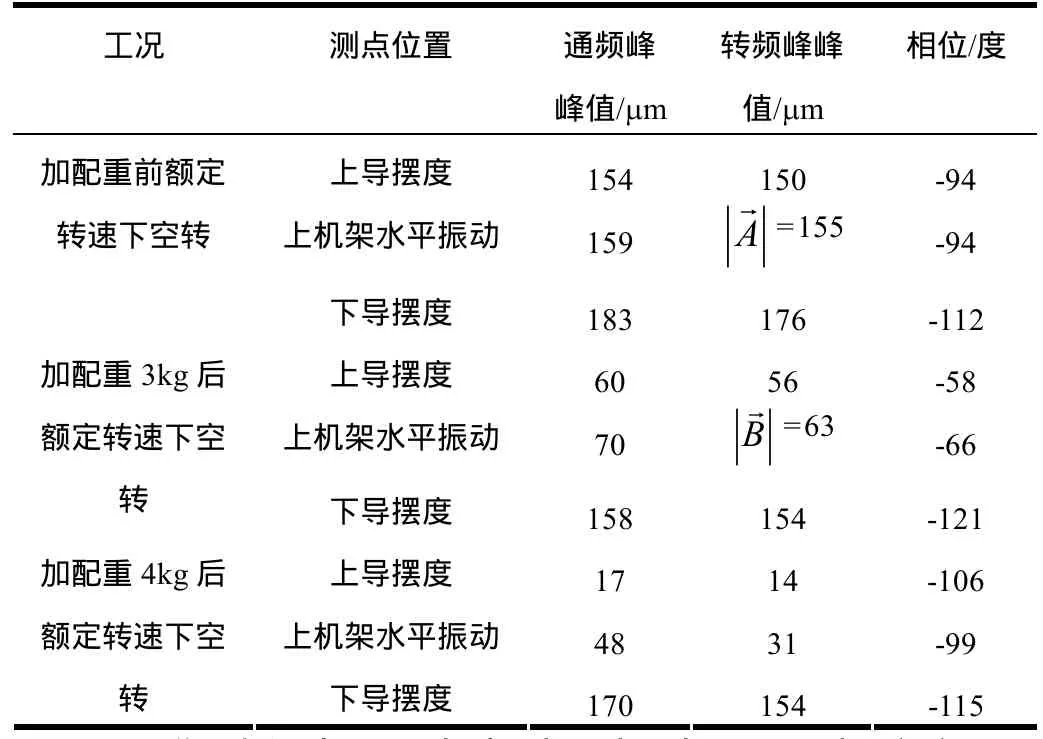
表1 振摆数据
平衡过程中,上机架水平振动、上导摆度和下导摆度的时域波形见图1—图3(图中的波形由上到下依次为上导摆度、上机架水平振动和下导摆度)。
由表1和图1-图3的数据可以看出,在转子上部加配重对上机架振动和上导摆度有较大的影响,使上机架振动和上导摆度下降很多,在转子上部加配重对下导摆度有影响,使其有所下降,但下降的幅度不够大,要减少下导摆度和下机架振动,应在转子下部加配重,这样才能有效减少下导摆度和下机架振动。
4 结论
本文对高转速水轮发电机组提出了有效的转子动平衡新方法。该方法根据高转速水轮发电机转子转速高的特点,在平衡中考虑了机械滞后角的影响。应用该方法,第一次启机就可以判定不平衡力的大致方位,第二次启机可以准确判定不平衡力的方位和配重的重量,第三次启机即完成平衡工作,与其他方法比较,具有仪器设备轻便,启机次数少,平衡精度高,加试重即能显著降低机组振动水平等优点。
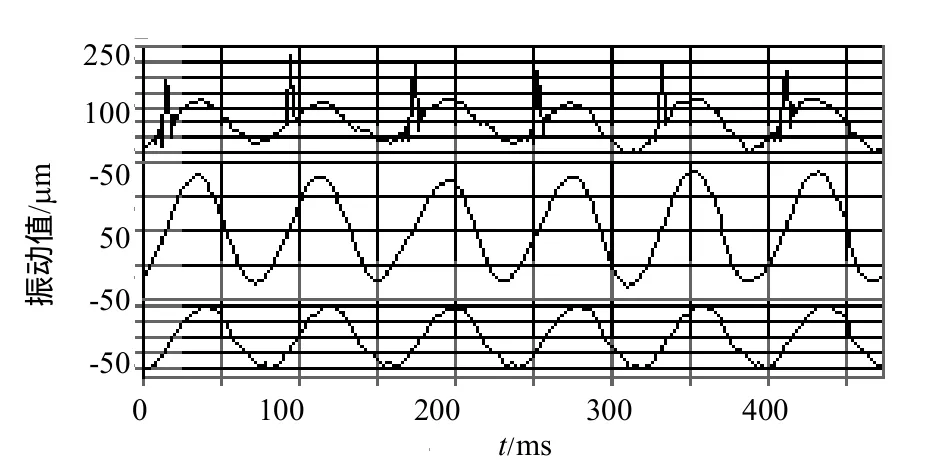
图1 加配重前波形图
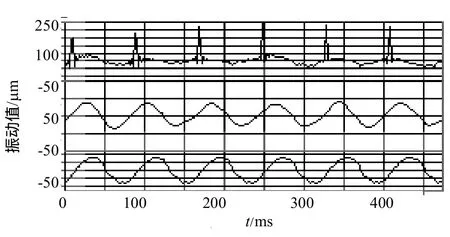
图2 加试重3kg后波形图

图3 加配重4kg后波形图
[1] 姚大坤. 影响系数法在水电机组动平衡中的应[J].黑龙江电力,2001(5):81-85.
[2] 周仁睦. 转子动平衡[M]. 北京:化工出版社,1992.
[3] 钟一谔 何衍宗 王正 李方泽 转子动力学[M].北京:清华大学出版社,1987.
审稿人:吕桂萍
A Effective Method of the Dynamic Balance Test for Hydrogenerator Rotor with High Operating Speed
Que Guangqing
(Harbin institute of large electrical machinery, Harbin 150040, China)
The research work has been done on the dynamic balance test method for hydrogenerator rotor with high operating speed. A effective method is given. This method has many advantages: the working can be done with the simple measure instrument; the time for starting hydrogenerator is little; and the result is accurate.
hydrogenerator; high operating speed; dynamic balance; mechanical hysteresis angle
TM343
A
1000-3983(2012)02-0031-03
2011-05-07

阙广庆(1960-),1982年毕业于哈尔滨船舶工程学院电工师资专业;1992年毕业于哈尔滨工业大学电力系统及其自动化专业,获硕士学位;现从事电机机械振动测试工作,高级工程师。
猜你喜欢
水电站机电技术(2023年10期)2023-11-16 01:38:14
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:06
大电机技术(2022年2期)2022-06-05 07:29:02
初中生学习指导·提升版(2022年3期)2022-03-19 23:01:44
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:04
兰台世界(2017年12期)2017-06-22 14:17:25
女子世界(2017年3期)2017-03-13 00:38:31
水电站机电技术(2016年1期)2016-02-28 14:22:01
水电站机电技术(2014年6期)2014-09-26 12:07:45
水电站机电技术(2014年1期)2014-09-26 11:59:45