基于激光传感器的智能车路径识别系统设计
2012-09-20 02:55:58罗强徐文城刘尧
电气自动化 2012年5期
罗强,徐文城,刘尧
(北京交通大学 电子信息工程学院,北京 100044)
0 引 言
本文的背景是“飞思卡尔杯”全国大学生智能车竞赛,大赛要求实现智能车对赛道自主识别和循迹。取胜的关键是准确地识别路径、实时的速度和转向控制,因此路径识别模块在整个智能车控制系统中显得格外重要。路径常用的检测器件有光电传感器和CCD图像传感器。光电传感器具有电路原理简单、安装方便、检测速度快、数据量小、数据处理简单的优点而得到了广泛的运用,但存在前瞻性不够、易受外界光线影响的不足,极大地限制了智能车速度的提升。本文详细介绍了一种基于激光传感器的智能车路径识别系统设计,解决了光电传感器前瞻性不足和易受现场环境干扰的问题。
1 系统整体设计
智能车系统主要包括稳压电源、路径识别(路径信息采集和处理)、速度采集、舵机驱动、电机驱动5大 模 块[1],本 文 主要针对路径识别模块进行研究和设计。路径识别模块与智能车系统的其他模块关系如图1所示。
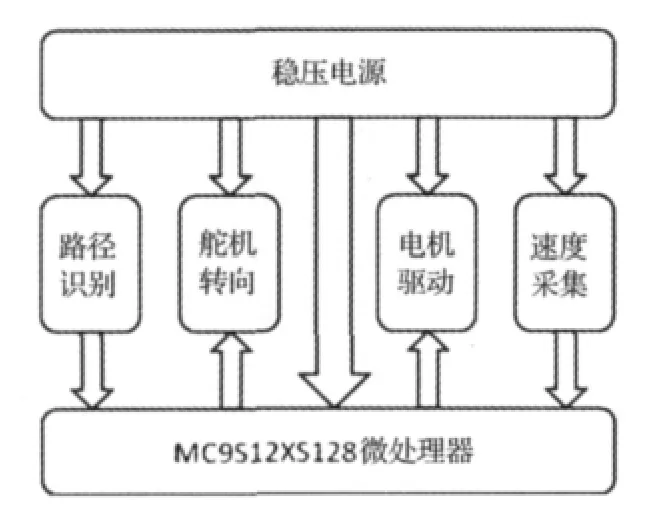
图1 系统结构图
2 路径信息采集
光电传感器作为路径采集器件,虽具有电路设计简单、安装方便、检测速度快、数据量小等优势,但受其前瞻太短、易受光线干扰的影响,在竞赛中往往表现为智能车冲出赛道、比赛失败或速度太慢等现象。本节详细介绍了光电传感器的选择、循迹原理、布局和电路设计等方面,从根本上解决了光电传感器前瞻不足和易受干扰的问题。
2.1 光电传感器的循迹原理
光电传感器分为发射和接收部分。接收一般采用光敏晶体管。光敏晶体管是将光信号变成电信号的半导体器件。光敏晶体管在一般照度的光线照射下,所产生的电流叫光电流。光电流会随着外界光线强度的改变而变化,因而常用于测量光亮强度。通过VI转换电路可将光电流信号转换为电压信号,作为微处理器的AD转换和I/O输入信号。
智能车是基于车载传感器动态摄取路面信息,识别白色场地中的黑色引导线,并且沿着黑线行驶的智能控制系统。黑色和白色材质对光线拥有不同的反射率,根据光照射到白色部分和黑色引导线时,反射到光敏晶体管的光照量不同,来辨别黑色引导线与车模的偏移位置。
2.2 光电传感器的选择
市场上光电传感器种类繁多,参数也不一致,如何选取合适光电传感器至关重要。目前,市场上的光电发射管主要分为红外和激光两种;光电接收管主要分为光敏二极管和光敏三极管。
红外传感器
优点:体积较小,重量轻,便于安装,电路设计简单,市场上已经有比较成熟的红外发射器,使用方便。
缺点:(1)发射功率较小,照射距离不远,光比较发散,不利于提高系统的前瞻性。(2)红外传感器受温度影响较大,采集的值波动很大,数据处理麻烦,不利于系统的稳定。(3)易受大气红外线干扰,鲁棒性差。
激光传感器
优点:可见,直射距离远,平行性好,能量衰减小,能有效提升探测距离,提高系统的前瞻性[2]。
缺点:(1)激光所需功率大,使用寿命不长,且激光头较重,安装不方便。(2)由于市场上没有专门的激光接收管,数据处理起来也比较麻烦。
光电接收管
光敏三极管与光敏二极管相比具有很大的光电放大作用,即具有高的灵敏度,并且不同材料制作的光敏三极管具有不同的光谱特性。
综合以上比较,红外传感器虽然安装比较简便,使用寿命长,但由于照射距离的限制,不利于提高系统的整体反应速度。所以本系统在基于提高前瞻的出发点上,采用了激光管作为发射管。由于外界光线的存在是不可避免的,必须考虑给光电接收管采集信号带来的影响。为了尽可能的减少外界光信号的接收,最终选定只接收180kHz特定频率光信号的光敏三极管作为光电传感器接收管。本系统首先从器件的选择上初步提高了路径识别的前瞻性和抗干扰能力。
2.3 采集电路设计
采集电路是路径识别系统最关键的部分,更是本系统较其他识别系统设计创新部分之一。它突破了传统识别系统发射管持续发射靠接收管来定位智能车的设计思想,改进为选通驱动调制后的激光信号,实现依靠激光管来定位智能车。
2.3.1 激光发射电路设计
发射电路需同时实现激光信号的调制[3]、选通驱动和过流保护等功能。
在传感器的选择中确定了采用只接收180 kHz特定频率光信号的光敏三极管作为接收管,则需要对激光发射信号进行调频处理。系统通过MC9S12XS128的PWM模块产生180kHz的PWM信号作为激光管的调制信号源,通过软件产生方案简化了硬件电路设计。在实际调试过程中发现相邻激光信号干扰现象比较严重,调制信号虽增加了抗外界光线干扰的能力,却带来了自身相互干扰的新问题,本系统又增加了选通驱动处理,为了减少I/O端口占用,选用2片138译码器定时产生选通信号。最终电路实现如图2所示,将PWM信号和选通信号通过与门叠加输出驱动激光二极管,同时完成了信号的调制和选通,简化了硬件电路设计。
2.3.2 接收电路设计
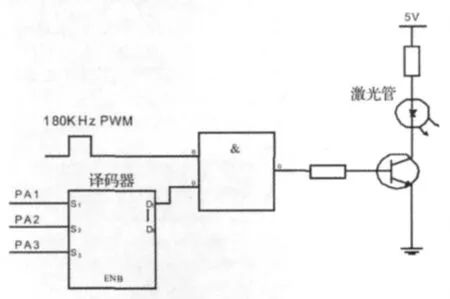
图2 发射电路
选用专门接收180kHZ光信号的光敏三极管作为激光信号接收器,加上光学聚光镜不仅可以将接收距离提高到40cm以上,满足小车前瞻性较远的要求;还扩大了接收范围,一个接收管可接收左右相邻3、4个发射管的光信号,结合发射管的选通驱动技术为依靠发射管来定位的设计思想给予了强大的支持,减少了接收管的数目,摆脱了竞赛规则对接收管数目限制的束缚。经过实验只需5个接收管就能完全接收15个发射管的信号。设计中通过加置上拉电阻,将接收管输出信号由模拟量转变成数字量信号,直接通过单片机的I/O通道进行数据采集,减少AD采集处理过程,提高了小车的响应速度。当激光照在赛道的白板上时,光信号反射回接收管,接收管输出为低电平,当照射在黑线上时反射回接收管的信号比较微弱,接收管输出为5V高电平。接收电路如图3所示。
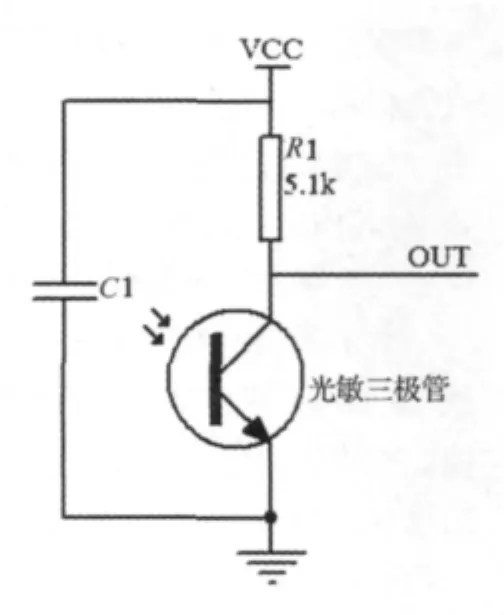
图3 接收电路
2.4 传感器布局

图4 传感器布局
传感器的布局也会影响路径信息的采集和信息的处理,常见布局方案有单排、双排、“一”字型、“八”字 型、“W”型[4]等。本系统采用简单的“一”字型单排布局模式,由15个激光发射管和5个接收管组成。鉴于比赛中规定导引线宽度为2 cm,经过多次试验可得,1.5cm等间距排布激光发射管时,智能车丢线情况最少,在识别中更能实现两个连续的激光管同时检测到黑线,这种分布排列为软件中的滤波算法提供依据,提高了识别精度,布局如图4所示。

图5 路径信息处理流程
3 路径信息处理
硬件设计确定后,算法软件就要发挥决定性作用。本节介绍了路径信息处理设计,主要完成传感器信号提取,信号滤波,导引线提取,赛道分析和舵机控制。软件流程如图5所示。
3.1 信号采集和滤波
系统的设计思想是通过选通驱动激光信号来定位小车。软件实现上通过定时器中断产生1ms间隔,依次驱动激光发射管和采集接收管信号。在某一激光管选通时,同时采集5个接收管信号。若5个接收管中至少有1为高电平,则表示此时发射管照射在黑色导引线上,否则照射在赛道白区上。这种采集方式不需要辨别是哪个接收管接收到了激光信号,也不需要固定采集与发射管相邻位置的接收管信号,较传统的采集方式更加灵活和简便。并将接收信号存入sen_flag[i]数组与发射管序号对应的位置中,其中1代表黑线,0代表白区。当15个激光管依次选通完后才完成路径信息的一次采集过程。
由于赛道的不光滑和不干净,采集的路径信息难免不出现错误,需要对采集的信息进行滤波处理,保证信息的准确性,降低智能车舵机转向出错的几率。基于15mm等间距的激光发射管布局设计,一般赛道(除起跑线、十字交叉线、全白区外)都会有两个发射管照射在黑色导引线上,同时sen_flag[i]数组中的黑线位置也会连续。如果sen_flag[i]中为1的位置不连续且跳变不规律,并和之前采集数据预测的情况偏差太大,则可判定为此帧数据无效,可直接删除或做一定修改。
3.2 导引线的提取
经滤波后的数据有很高的正确率,为导引线的提取提供了可靠的保证。观察到接收信号sen_flag[i]全为0\1信号,设计巧妙的借用CCD图像处理跳变沿的方式来提取导引线。将sen_flag[i]中为1的位置信息存入black[i]中,并统计为1的个数赋给sen_blackcount,即是保持照射在黑线上的激光发射管编号和个数。依次比较black[i]中所存位置是否连续,统计跳变次数赋值给sen_change。根据表1罗列的跳变关系和黑点数可以准确的提取出黑色导引线。
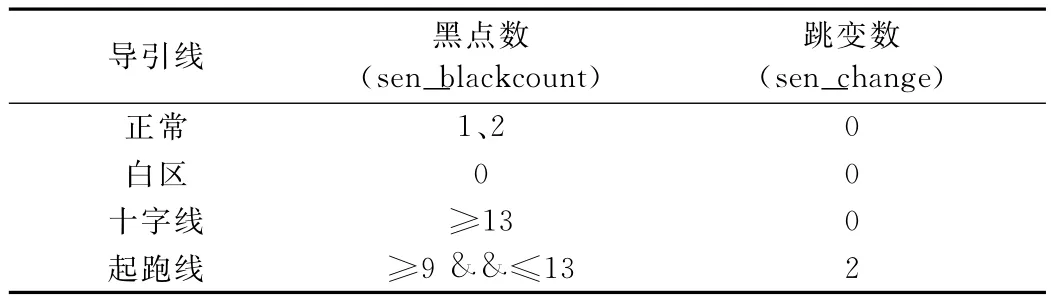
表1 导引线与黑点数、跳变数关系
3.3 赛道分析
按一定间隔存储一定量的导引线信息,可形成像摄像头采集的一帧图像信号一样,可根据导引线的走势区分出直道、小S、大S、小圆等赛道区段。改变了传统意义上光电传感器只能提供孤立和单一排路径信息的局面,让智能车能够看清前面一段路面整体情况后再选择如何去走,而不是像盲人一样依靠拐杖探索着去走。这样的设计让智能车在实际竞赛中表现更为精彩。
3.4 转向控制
提取完导引线、分析了赛道情况,接下来就是舵机转向控制。好的转向控制算法能使智能车转得更灵活,走路径更短,更稳定。系统在转向控制上主要采用加权算法[5]和赛道预测法联合计算转向控制量。
(1)加权算法求小车转角值
依据每个激光管距离车中心的位置,给予不同的权重值sen_quan[i]。计算方法如下:
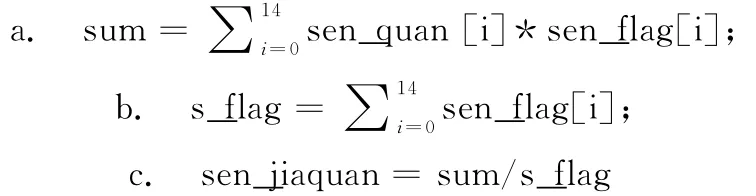
其中,sum为所有照射到黑线的发射管的权重值之和;s_flag为检测到黑点的个数;sen_jiaquan为转角值。
(2)赛道预测法
主要是根据赛道分析结果预测出一个舵机转角值sen_exp,配合加权算法得到的转角值sen_jiaquan计算出实际转向值,通过PWM输出到转向伺服电机上,实现智能车方向控制。加权平均和赛道预测联合算法大大地改善了光电传感器智能车因前瞻不足而出现的转向滞后问题。
4 结束语
本文对基于激光传感器的智能车路径识别系统进行了较为深入的研究,重点介绍了采集电路的设计、信号处理、舵机控制算法。通过智能车实践及竞赛证明,系统工作稳定,性能高。
[1]卓晴,黄开胜,邵贝贝.学做智能车[M].北京:北京航空航天大学出版社,2007:1-369.
[2]蓝信钜.激光技术[M].武汉:华中科技大学出版社,2005-9-2.
[3]许欢,唐竞新.调制光寻线系统及其在自动行走机器人中的应用[J].清华大学学报(自然科学版),2002,42(1):115-117,142.
[4]黄开胜,金华民,蒋狄南.韩国智能模型车技术方案分析[J].电子产品世界,2006,20(3):150-152.
[5]张国范,顾树生,王明顺.计算机控制系统[M],北京:冶金工业出版社,2004:105-108.
[6]李兵,何克忠,张朋飞,等.自主轮式机器人THMR-V的混和模糊逻辑控制[J].机器人,2003,25(6):539-543.
[7]ZHAO Lilong,FANG Zhiliang,GU Zecang.Novel Adaptive Thresholding Technique for poor Lighting Document Image Based on Human Vision Characteristic[J].ACTA PHOTONICA SINICA,2009,38(5):1301-1305.
猜你喜欢
水下无人系统学报(2024年1期)2024-03-14 03:42:52
山东陶瓷(2021年5期)2022-01-17 02:35:46
科技视界(2020年15期)2020-08-04 16:20:35
电子制作(2019年16期)2019-09-27 09:34:58
电子制作(2019年23期)2019-02-23 13:21:36
数字海洋与水下攻防(2018年2期)2018-11-08 01:01:44
光学精密工程(2016年5期)2016-11-07 09:06:00
电源技术(2016年2期)2016-02-27 09:05:13
云南中医学院学报(2015年2期)2015-07-31 18:11:49
云南中医学院学报(2015年3期)2015-07-31 18:09:27